



1.变胞机构的组成原理
将机构自由度大于1的闭式运动链的一个构件固定为机架,选择一构件为主动件即得到一个变胞源机构。该变胞源机构的自由度即为该运动链的机构自由度。例如,将图5-10e所示F3B-4的运动链中的构件8选为机架,构件1选为主动件,构件4、构件7为滑块,得到如图5-10f所示的具有两个可变构型的变胞源机构。如图5-10g所示,若将运动副B、G固定(图中涂黑的运动副,即变胞副),使构件1、2以及5、6合并,将得到如图5-10h所示的F=1的6杆变胞机构。
2.变胞副及变胞机构自由度
使所属两构件的运动性质和自由度改变的运动副称为变胞副。加入一个变胞副即机构减少一个构件和一个运动副,此时机构减少的自由度为F=3×1-2×1=1。可见,变胞机构的自由度等于变胞源机构的自由度减去变胞副数。由于变胞机构运动中的自由度为1,故机构中可加入的变胞副个数等于变胞源机构的自由度减1。若令F为变胞源机构的自由度,Fb为变胞机构的自由度,pb为机构的变胞副个数。
得到变胞机构的自由度为
Fb=F-pb (5-1)
机构的变胞副的个数为
pb=F-1 (5-2)
例如图5-11b所示变胞源机构自由度F=3,图5-11c所示为具有两个变胞副的变胞机构自由度Fb=3-2=1。若只给出一个变胞副,则变胞机构自由度为Fb=2。
3.变胞点及其结构形式
变胞点是指机构中促使机构构型和机构自由度改变的可见构件或非可见瞬时机构位置点。如挡块、变胞副都是变胞点。
变胞机构中变胞点是否参与干涉,何时参与干涉是确定变胞机构真实运动程序的关键。变胞点的形式有以下几种:
(1)电控完成构型改变 如图5-11a所示为五杆机构,其机构自由度F=2。构件1为主动件,滑块3的运动由计算机控制。当滑块3不参与运动时,该机构为F=1的四杆机构;当滑块3参与运动时,该机构为F=2的五杆机构。
(2)几何约束改变的变胞副 如图5-11b所示,构件1、2在中间接触时为高副,一个约束;在端部接触时,为转动副,两个约束。又如图5-11c所示,构件1、2在中间接触时为移动副;在端部接触时,1、2构件合并。
(3)力约束改变构件合并或分离 如图5-11d所示,构件1、2间的力小于弹簧变形力时,构件1、2间固结;构件1、2间的力大于弹簧变形力时,构件1、2间分离。又如图5-11e所示,当构件2对1的力矩小于弹簧3产生的摩擦力矩时,构件1固结;反之构件1转动。这些变胞副大都用于机械保护装置中。
(4)变胞挡块 如图5-11f所示,当构件2上的挡块F、F′不与构件1接触时,构件1、2分离;反之构件1、2固结。
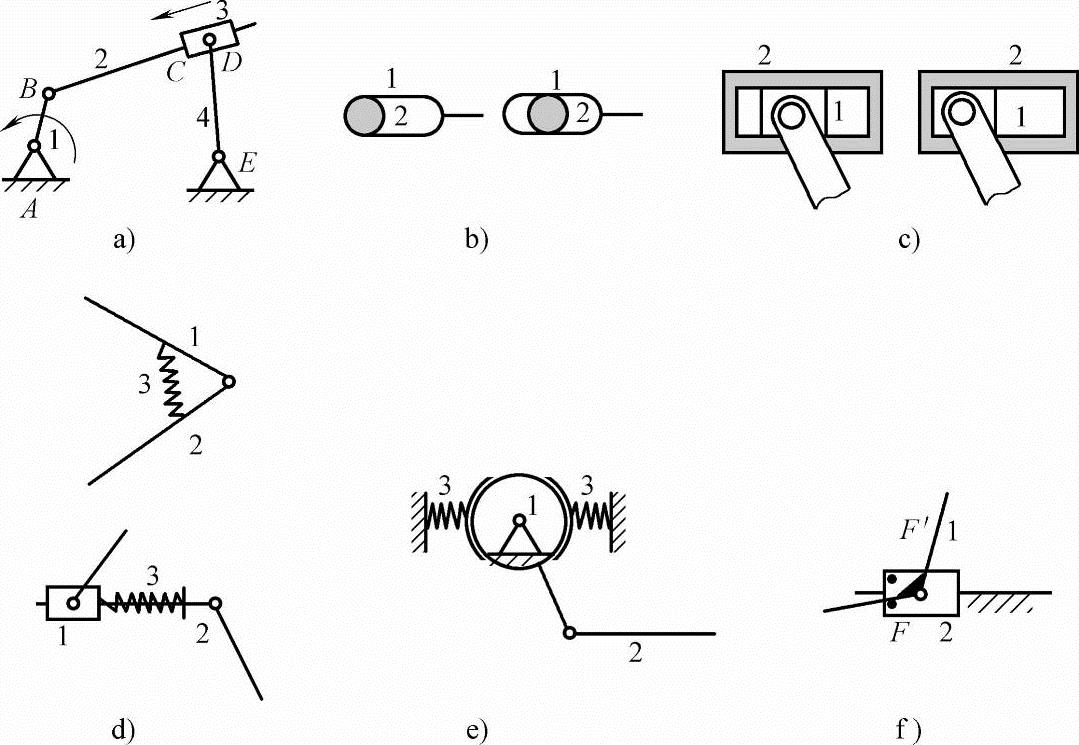
图5-11 变胞点的形式(https://www.xing528.com)
a)电控变胞 b)变胞副改变约束 c)变胞副改变构件数 d)、e)力约束改变构件数 f)变胞挡块
4.变胞机构的构型
变胞点对变胞元机构干涉后(例如:加入变胞副),就可以得到F=1的变胞机构。机构的构型随变胞副的位置不同而发生改变。现采用直观方法确定其构型。例如图5-12a所示变胞元机构为F=3的8杆机构,由式(5-2)知,应加入两个变胞副。在机构的ABCDEA环路中(F=2)加入一个变胞副,即分别以B、C、D、E为变胞副,得到机构的4种构型;另一环路ABCFGHIA中分别以F、G、H、I为变胞副又可得到机构的4种构型,共有4×4=16种构型;如果在环路ABCFGHIA中选取2个变胞副又可得到不同的构型。即分别在6个运动副B、C、F、G、H、I中选取2个变胞副,共有6×5/2=15种构型。即该变胞元机构共有31种构型。
但该法并未剔除同构的那些构型。例如分别选择D、F和D、G为变胞副的两种构型均为图5-12b所示的同一机构。故此,提出归一运动链判别法。
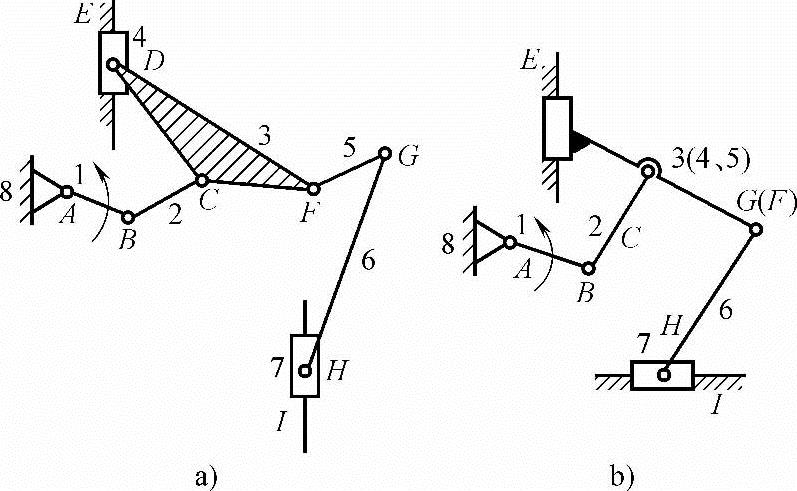
图5-12 直观方法确定变胞机构的构型
a)变胞源机构 b)变胞机构
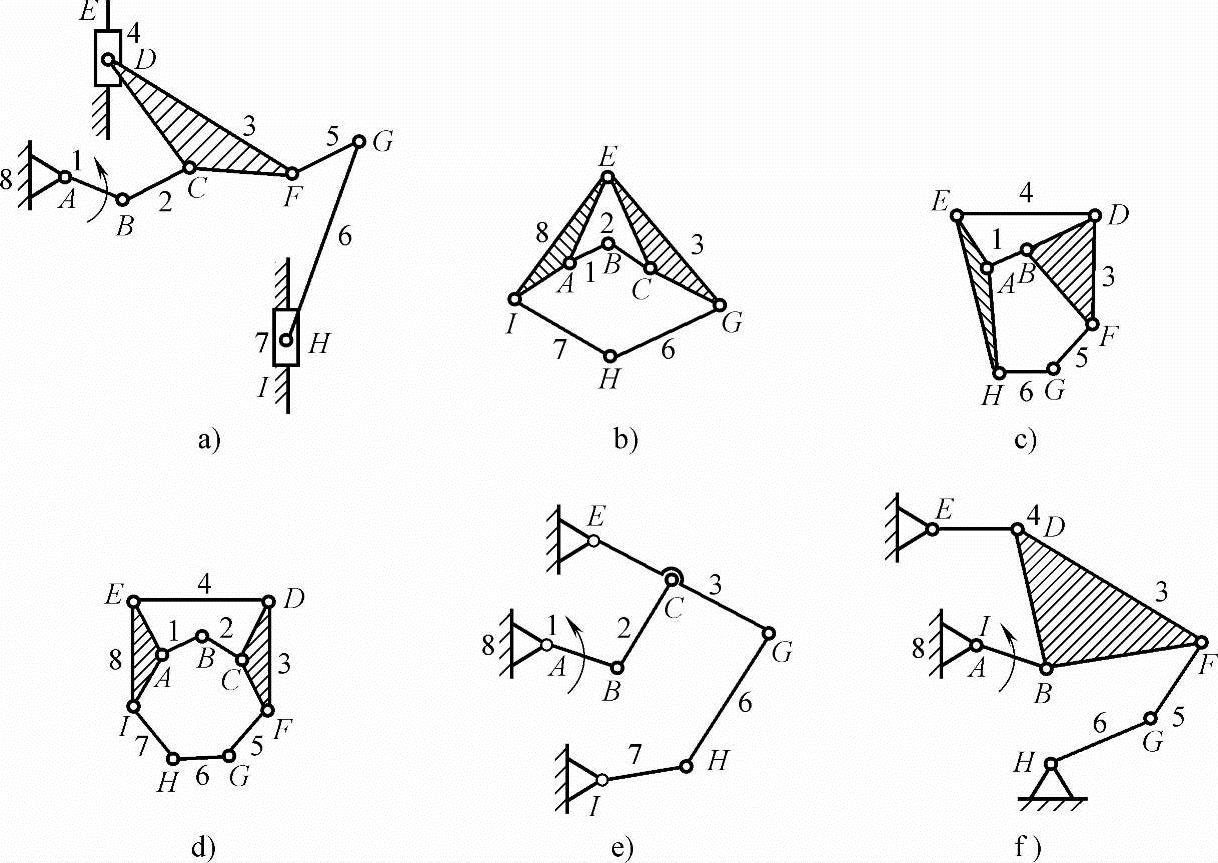
图5-13 变胞机构的构型
a)变胞元机构 b)F3B-1-4 c)022-022运动链 d)112-112运动链
e)022-022变换的机构 f)112-112变换的机构
将变胞元机构加入pb个变胞副后,该机构将减少pb个构件和pb个运动副,且机构自由度为1。因此,所谓变胞机构构型的归一运动链判别法即为将多自由度的变胞元机构的运动链减去pb个构件和pb个运动副,使其转化为F=1的多元连杆数不变的运动链。该运动链称为原运动链的归一运动链。该归一运动链变换出机构的构型即为变胞机构的构型。
如图5-13a所示变胞元机构为由两个三元连杆构成的F=3的8杆9副运动链(图5-13b),加入F-1=2的变胞副(同时减少2个构件)后归化为由两个三元连杆构成的6杆7副F=1的归一运动链。由表3-3中F=1的闭式运动链数组构型表可见,含有两个三元连杆的六杆归一运动链为F1C-1(022-022)和F1C-2(112-112)全转动副运动链。按照变胞元机构的构型要求,选择图5-13c、d中8为机架,1为主动件得到图5-13e、f所示的两种全转动副变胞机构。
由于在原变胞元机构中有两个移动副,考虑到该移动副选为变胞副而成为机架的情况,图5-13e、f中的支座转动副E-I和E-H有(R-R,P-P,R-P,P-R)4种组合。所以该变胞机构有8种独立的构型,如图5-14所示。
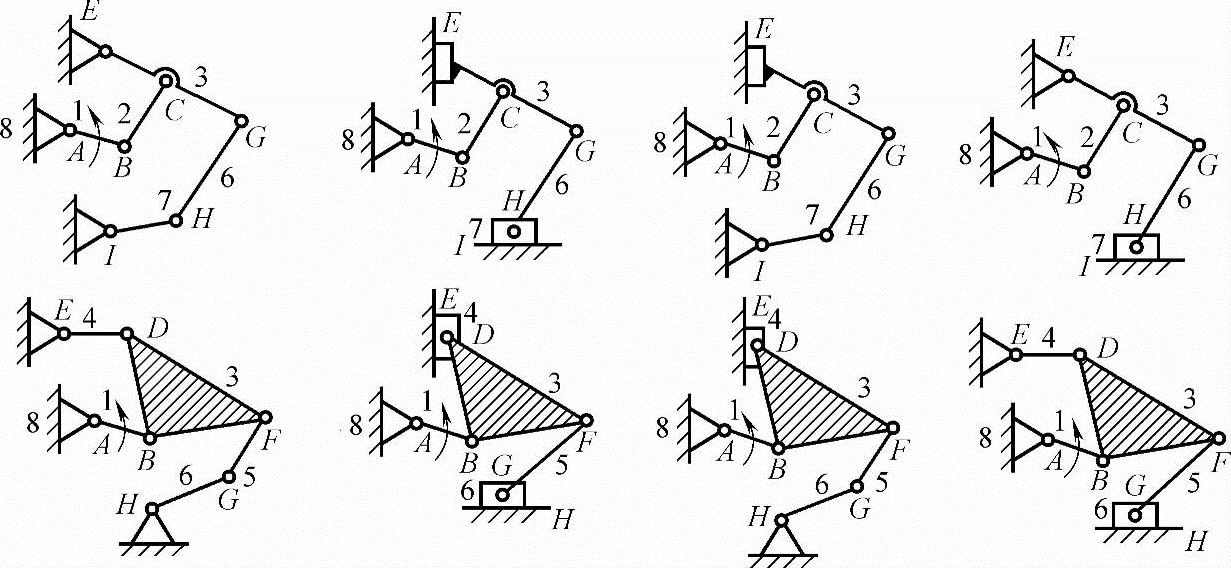
图5-14 变胞机构的8种构型
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。