



作一般平面运动的二杆组以上的机构均为高级机构,因为其位置方程是一个多元非线性方程组,不能由代数式直接求解而采用计算机迭代计算其近似值。下面对全移动副机构进行运动分析,检验其是否符合这一规律。
1.一杆组机构的运动分析
如图4-20所示,构件1为主动件。已知主动件的位移、速度、加速度:s1,s1′=υ1,s2″=a1。
以三个移动副导路相交而构成的三角形OCB建立机构的计算模型。得矢量方程:
s1=s3+s2
OB=OC+CB
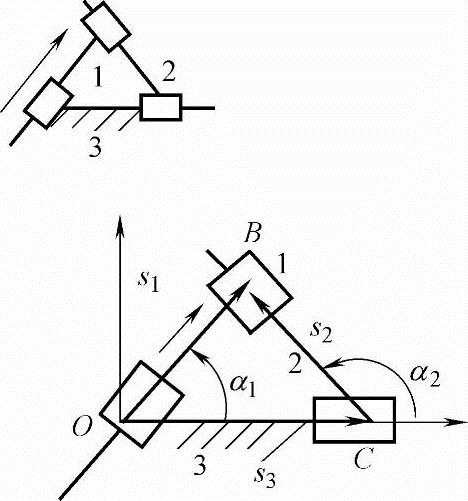
图4-20 1杆组机构运动 分析模型
将矢量方程写成坐标方程:
s1cosα1=s3+s2cosα2
(4-14)
s1sinα1=s2sinα2
整理得

对t求导得速度方程:

再对t求导得加速度方程:

2.二杆组单自由度机构的运动分析
如图4-21a所示,机构的自由度F=2n-p=6-5=1。构件1为主动件且已知为s1、s1′=υ1、s1″=a1。
由于机构作平动故所有构件间的夹角不变且为常值。为简化运动分析,按各构件导路相交所构成的图形建立机构计算模型,如图4-21c所示以3个构件1、2、3的固定导路相交的直线KAE为x轴建立坐标系。各构件导路位置角αi(i=1,2,3,4,5)均为已知且为常量,其方向按逆时针度量。
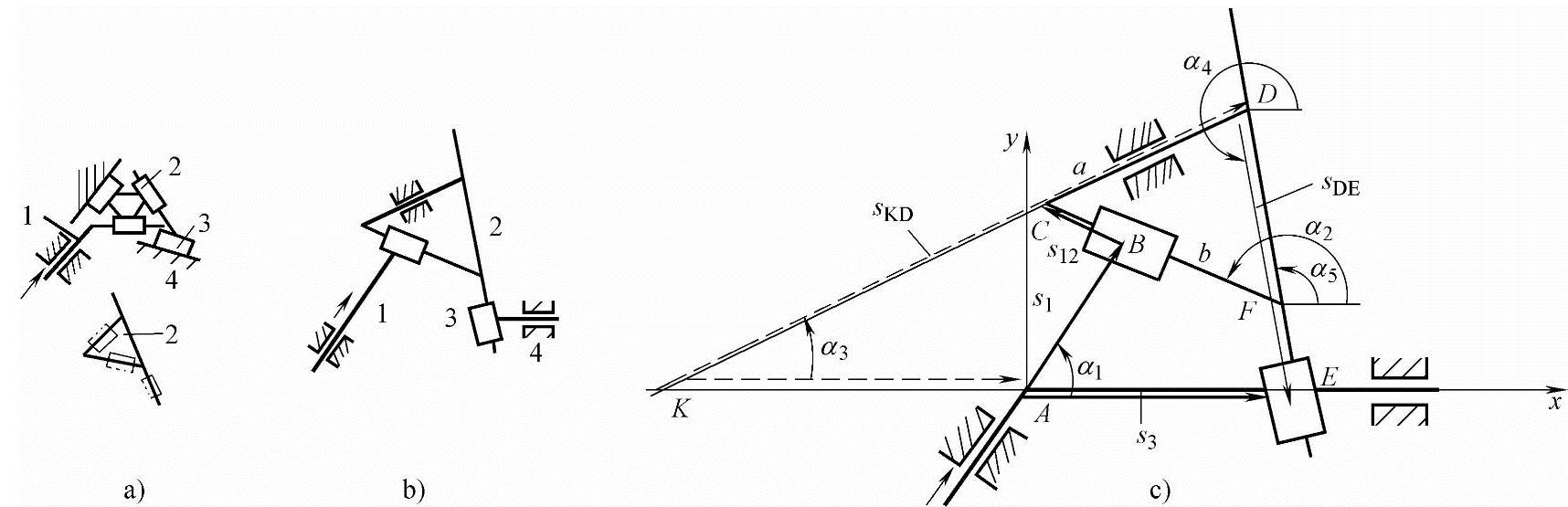
图4-21 二杆组单自由度机构的运动分析
a)二杆组机构 b)机构模型 c)机构分析模型
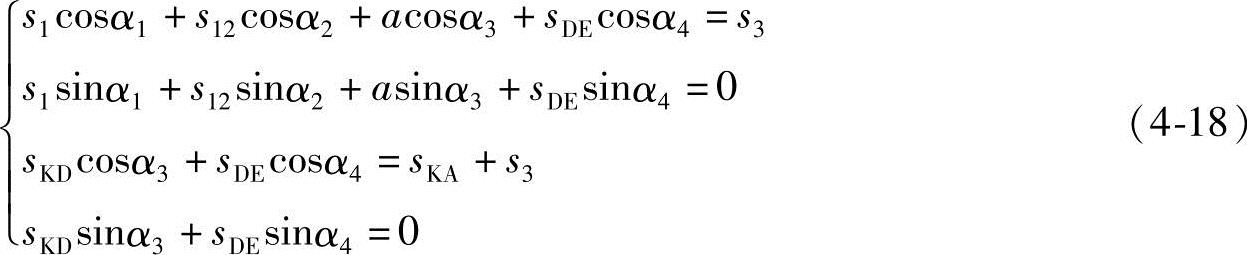
按封闭回路ABCDEA和KDEAK写出矢量方程:
AB+BC+CD+DE=AE
KD+DE=KA+AE
按矢量方程得到如下坐标方程:
 (https://www.xing528.com)
(https://www.xing528.com)
式中,s12、sDE、sKD分别是点B和C、D和E、K和D间的可变距离;s3为构件3的位移,4个可变位移参数均为待求量;a、sKA分别为三元连杆和机架的结构尺寸。由于位置角为常数,故上式是一个四元线性方程组。其矩阵为

上式对时间t求导可得其速度、加速度方程。


3.二杆组两自由度机构的运动分析方法
如图4-22a所示,机构的自由度为F=2n-p=8-6=2。构件1、4为主动件且已知s1、s1′=υ1、s1″=a1,s4、s4′=υ4、s4″=a4。三个固定移动导路线交于点A、E、G,以AE为x轴建立坐标系。
将三元连杆2变换为由3个移动副导路构成的三角形构建机构模型,但其大小及方位将不发生变化,即三角形的边长a、b、c和方位角为已知且均不变。
图4-22b中,AB、KG分别为s1、s4。改变s1、s4时,两主动件推动三元连杆2平动并带动构件3沿其机架导路移动。此时两主动件上的点B、K分别在CF、CD导路上移动。
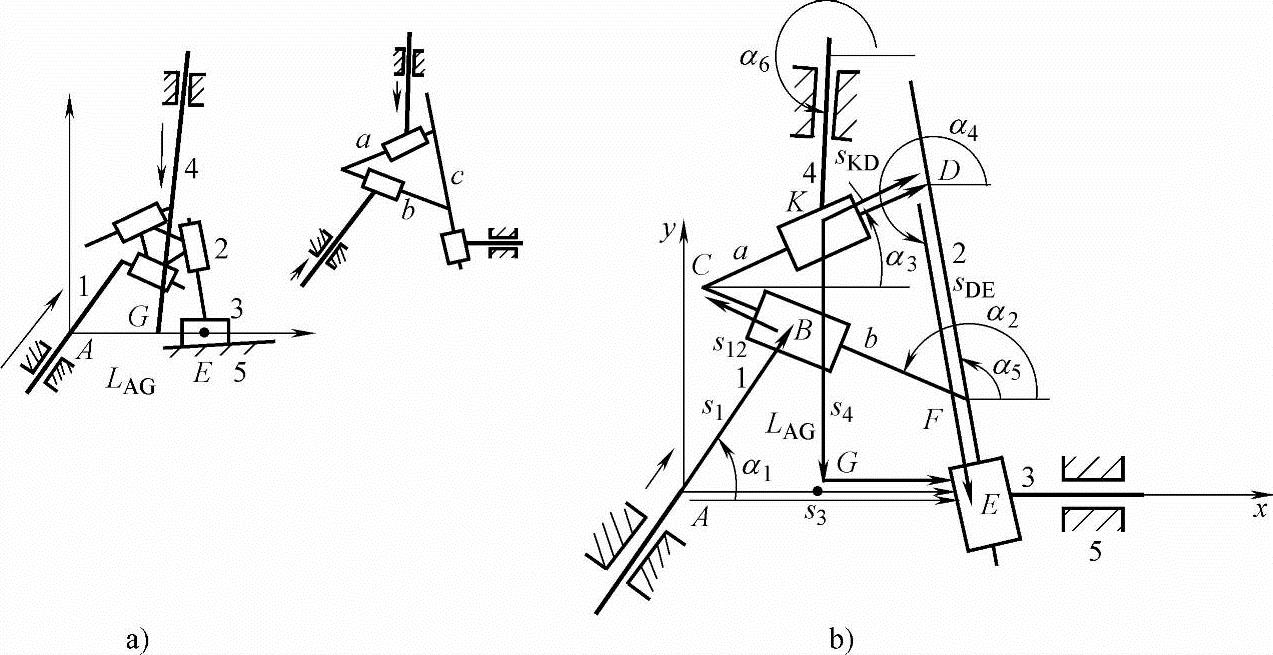
图4-22 二杆组两自由度机构的运动分析
a)二杆组两自由度机构 b)机构运动分析模型
运动分析时按ABCDEA和KGEDK两个回路建立矢量方程:
AB+BC+CD+DE=AE
(4-22)
KG+GE=KD+DE
其坐标方程:
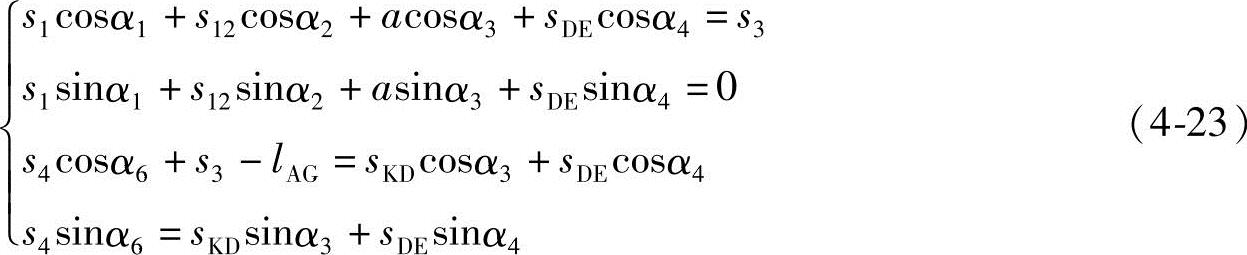
式中,s1、s4为给定的已知值,s12、sKD、sDE、s3为待求的可变值。由于各矢量的方位角为常量,故该位移方程是待求量的线性方程组。同理可求得其速度、加速度方程。此处不再累述。
4.三杆组机构的运动分析
图4-23a所示为由3个三元连杆2、3、4及主动件1和机架5构成的五杆全移动副机构。
其自由度F=2n-p=8-7=1。若拆去机架和主动件得到P4C杆组。图4-23b所示为机构运动分析的封闭矢量图,各几何量如图。若已知主动件的位移、速度、加速度:s1,s1′=υ1,s2″=a1。由封闭回路ABCDA、AHGEA、GFDEG可列出机构位置线性方程组:
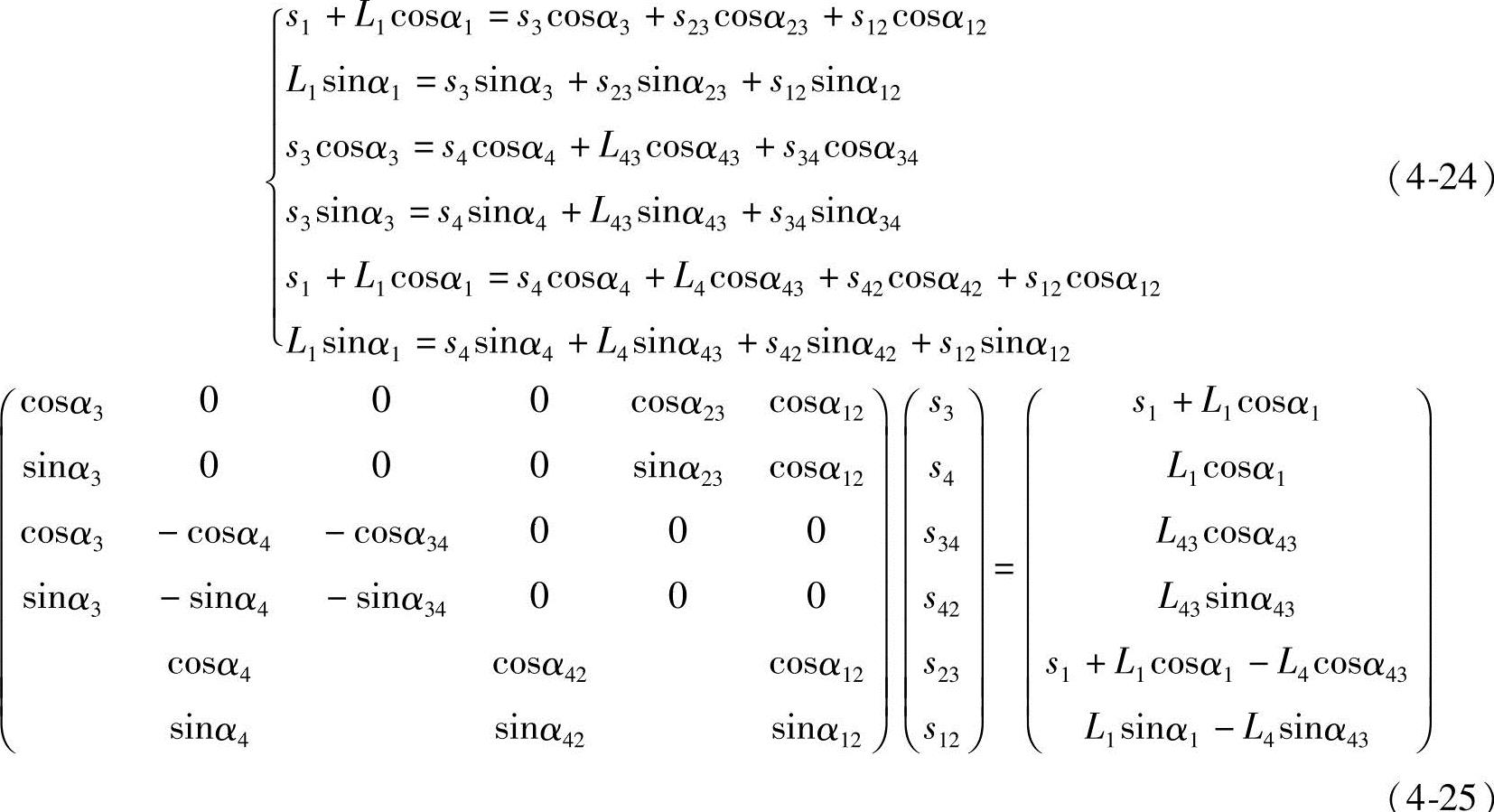
上式对时间t求导,可得到机构的速度、加速度方程。
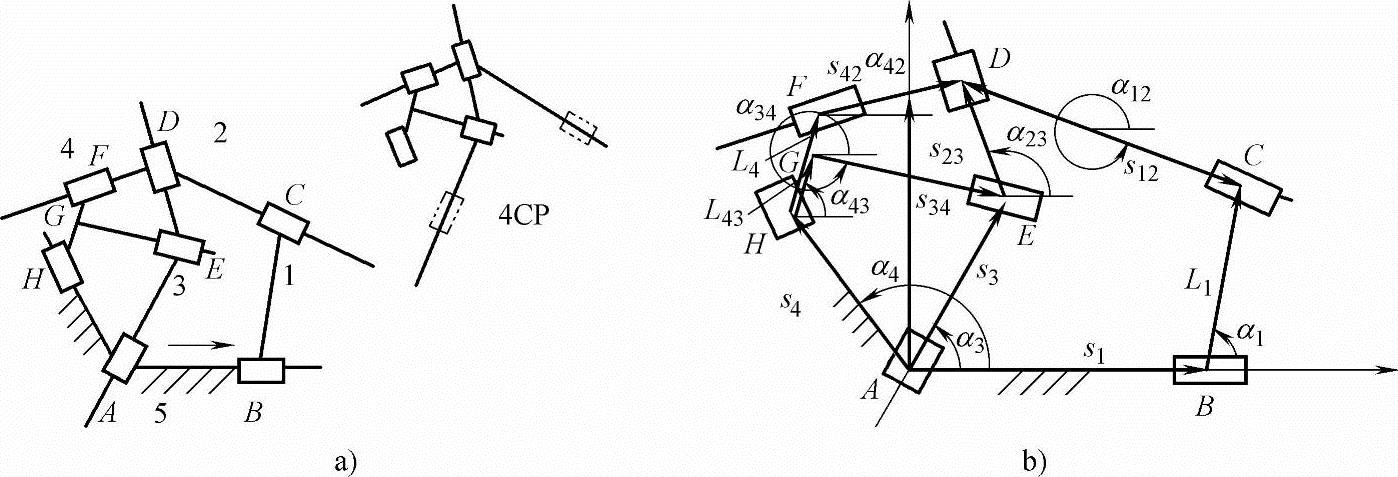
图4-23 三杆组机构的运动分析
a)机构图 b)机构封闭矢量图
综上所述,对于全移动副机构由于各杆位置角是不变的常量,其与一般作平面运动的机构的不同之处是:全移动副机构的运动分析方程式是线性方程,均可得到精确解。因此所有全移动副机构均为低级别机构。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。