



【摘要】:3)在绘制杆组结构图时,同一构件上的各移动副导路不可平行、垂直,否则将产生虚约束、运动干涉。图4-16 二杆组机构构建a)拓扑图 b)结构图 c)无效机构 d)二杆组全移动副机构表4-9为按上述方法计算出的四杆以下杆组的特征值,并按绘制拓扑图的要求甄别确定了11种有效特征值,列出了杆组及其异构体的15种构型。
拓扑图的绘制方法和原则与前述一致,但根据全移动副机构的运动特性对拓扑图的绘制提出如下要求:
1)允许由三个圆构成的环,因为三个构件构成的全移动副机构具有确定的运动。
2)只允许存在一个具有两条外伸线的圆,且其中的一条外伸线应与主动件相连,否则将产生运动干涉。
3)在绘制杆组结构图时,同一构件上的各移动副导路不可平行、垂直,否则将产生虚约束、运动干涉。
例如,二杆组特征值[n2n3n4pWLg]为11030,即n2=1,n3=1,n4=0,pW=3,Lg=0。如图4-16a所示拓扑图中一个圆的两条外伸线在图4-16b中即两个外接副(阴影表示的),若不按要求将这两个外接副与机架相连,机构将产生运动干涉,如图4-16c所示。若将该两外接副之一与主动件相连将得到如图4-16d所示二杆组全移动副机构。
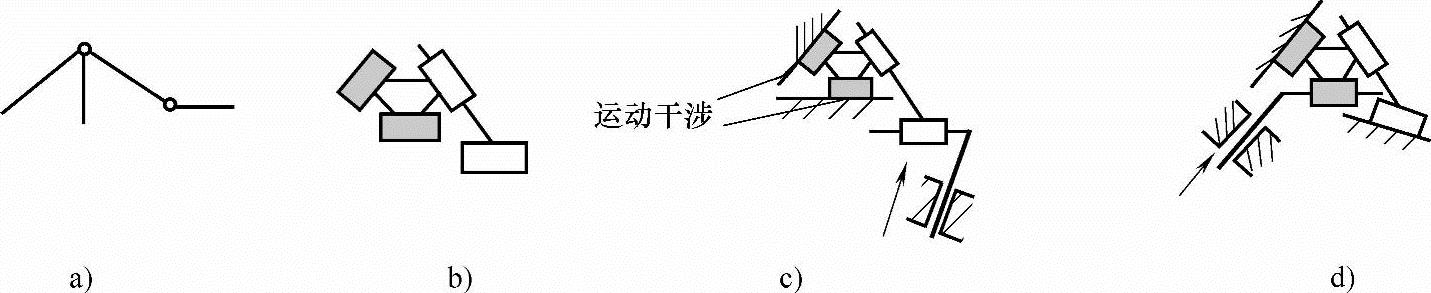
图4-16 二杆组机构构建(https://www.xing528.com)
a)拓扑图 b)结构图 c)无效机构 d)二杆组全移动副机构
表4-9为按上述方法计算出的四杆以下杆组的特征值,并按绘制拓扑图的要求甄别确定了11种有效特征值,列出了杆组及其异构体的15种构型。
表4-9 全移动副杆组及其结构图(涂有阴影两外接副之一要与主动件相连)

(续)

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。