



【摘要】:从上式中减去公共约束,且将移动副的个数表示为p,得全移动副机构(运动链)的自由度公式为F=2(N-1)-p (4-1)把含有j个移动副的构件称为j元连杆。设n2、n3、n4分别表示运动链中的二元、三元、四元连杆数,L为运动链的环数。表4-5 N、p、L匹配关系及运动链特征值
与一般平面低副机构的方法相同,首先讨论机构不同自由度运动链的构成,将运动链中的一个构件固定为机架并给出与自由度相对应的主动件,从而得到机构。因此全移动副机构型综合实质上就是探讨构成机构的全移动副运动链的构型。
构成全移动副运动链的数值计算公式如下:
根据空间自由度公式:
F=6(N-1)-5p5-4p4-3p3-2p1-p1式中,F为机构自由度;N为运动链的构件总数;pi(i=1,2,3,4,5)为空间约束为i的运动副的个数。对于全移动副机构而言,只有两个方向的移动,故其公共约束为4。从上式中减去公共约束,且将移动副的个数表示为p,得全移动副机构(运动链)的自由度公式为
F=2(N-1)-p (4-1)
把含有j(j=2,3,4)个移动副的构件称为j元连杆。设n2、n3、n4分别表示运动链中的二元、三元、四元连杆数,L为运动链的环数。
移动副数:
2p=2p2+3p3+4p4 (4-2)
运动链总构件数:
N=n2+n3+n4 (4-3)
环数L:(https://www.xing528.com)
L=p-N+1 (4-4)
将式(4-2)、式(4-3)代入式(4-1)得
2F=2n2+n3-4 (4-5)
整理式(4-3)和式(4-5)得
2N-2F=n3+2n4+4 (4-6)
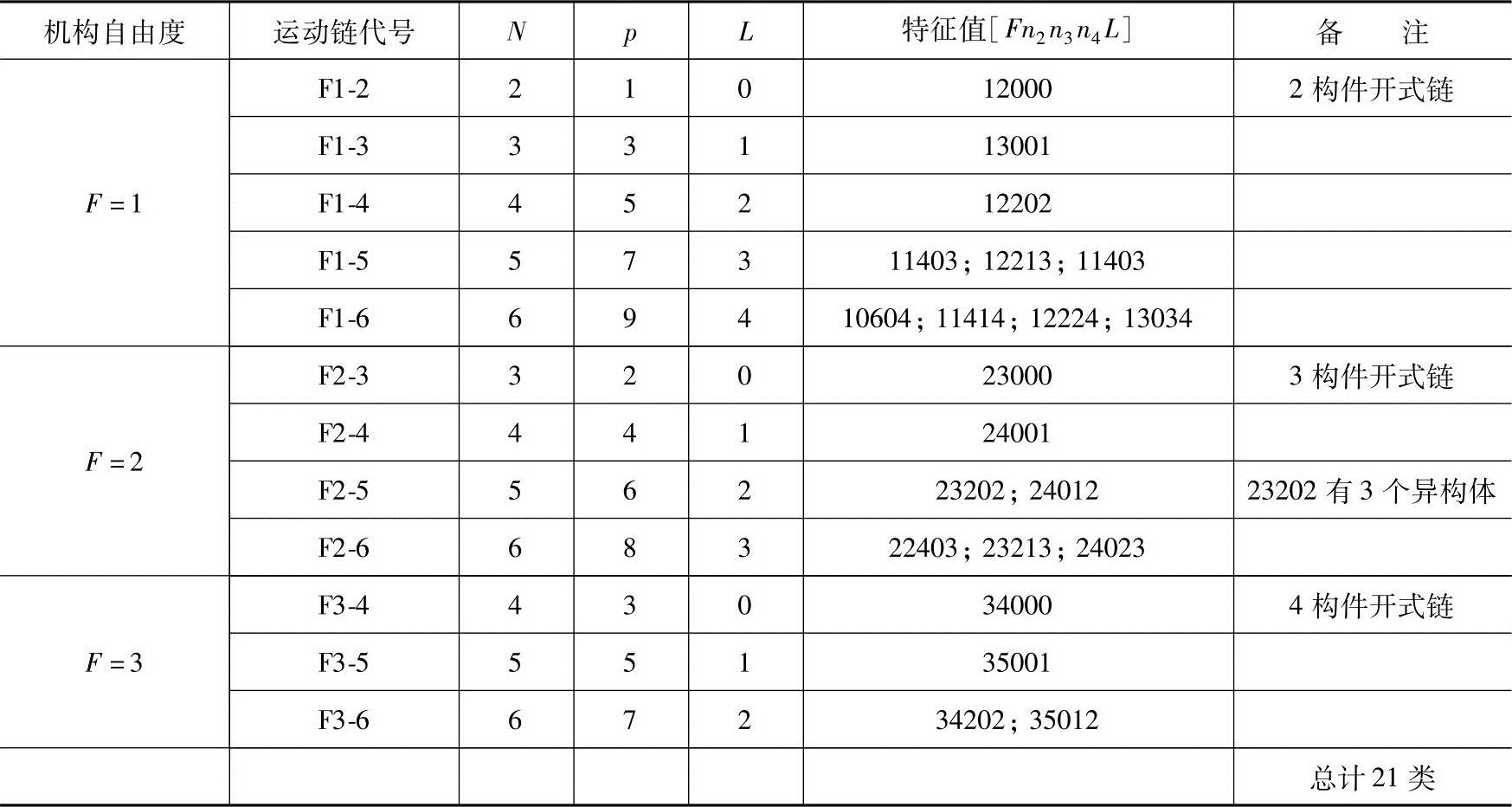
由式(4-1)得F=2(N-1)-p。当F=1时,p=2N-3;当F=2时,p=2N-4;当F=3时,p=2N-5。
N、p、L的匹配关系数值可参考表4-5。
表4-5 N、p、L匹配关系及运动链特征值
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。