



所谓降级法即重新设定原4A杆组(原Ⅲ级组)机构的主动件的位置,将机构降级为二杆组机构,然后判定其能动性。此时该二杆组机构相当于四杆机构(以下称为转化四杆机构)加一个二杆组。现分析各类杆组机构的能动性。
1.2P-4杆组机构的能动性
将表4-1中若干2P-4杆组构成的四杆机构表示在图4-11a中,更换主动件后得到一个由转化四杆机构和3R-2杆组构成的二杆组机构。其转化四杆机构如图4-11b、c所示。该机构的连杆即原四杆组的基础构件,只要该基础构件不出现虚约束、运动干涉,并且作一般平面运动,与其相连的3R-2杆组即具有确定的位置。由图4-11c知转化四杆机构都有对应的常用四杆机构。由此可知表4-1中所列的所有2P-4杆组所构成的四杆机构均具有实际能动性。
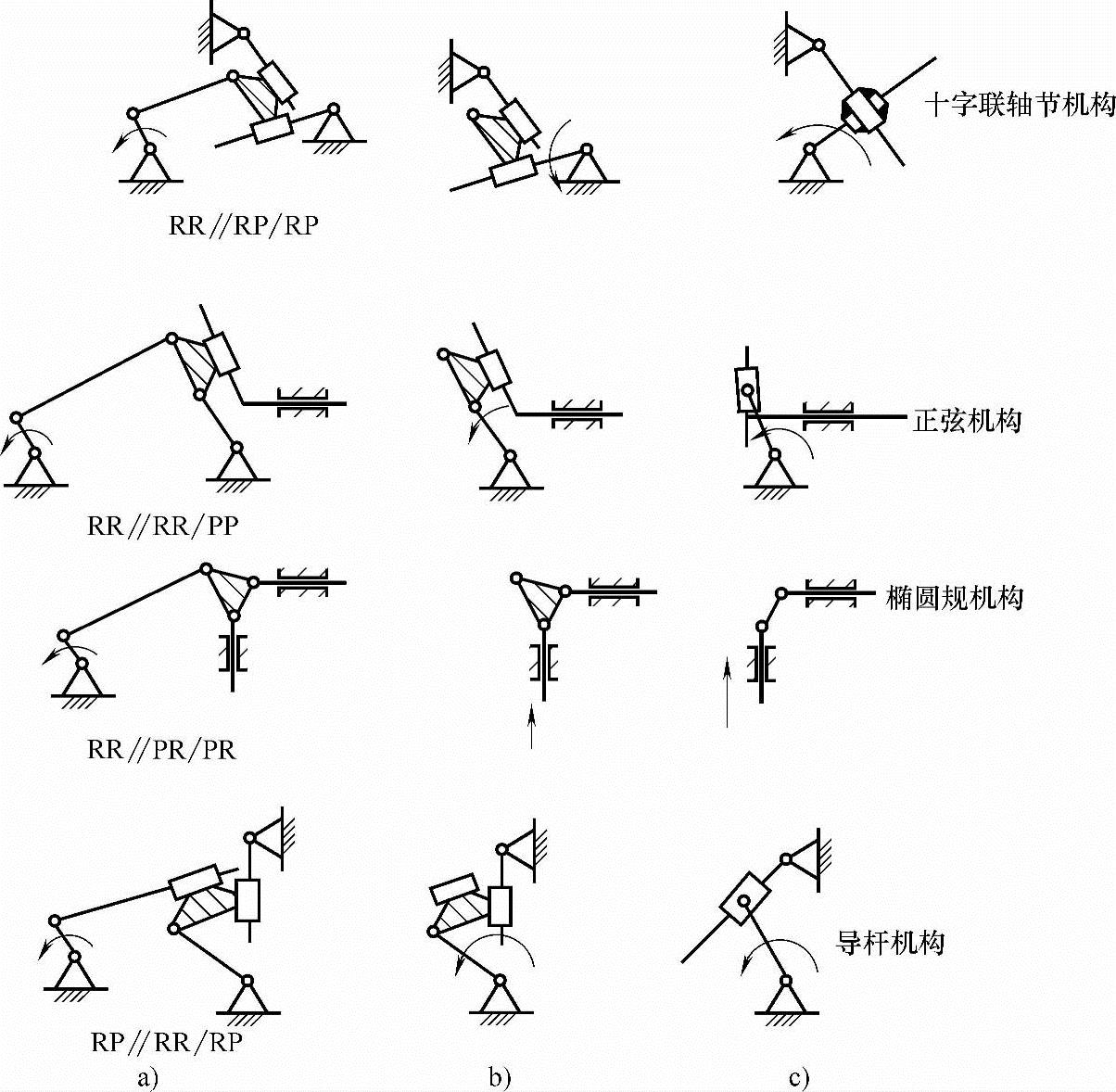
图4-11 2P-Ⅲ级机构的能动性判别
a)2P-Ⅲ级机构 b)转化四杆机构 c)能动的四杆机构
2.3P-4杆组机构的能动性
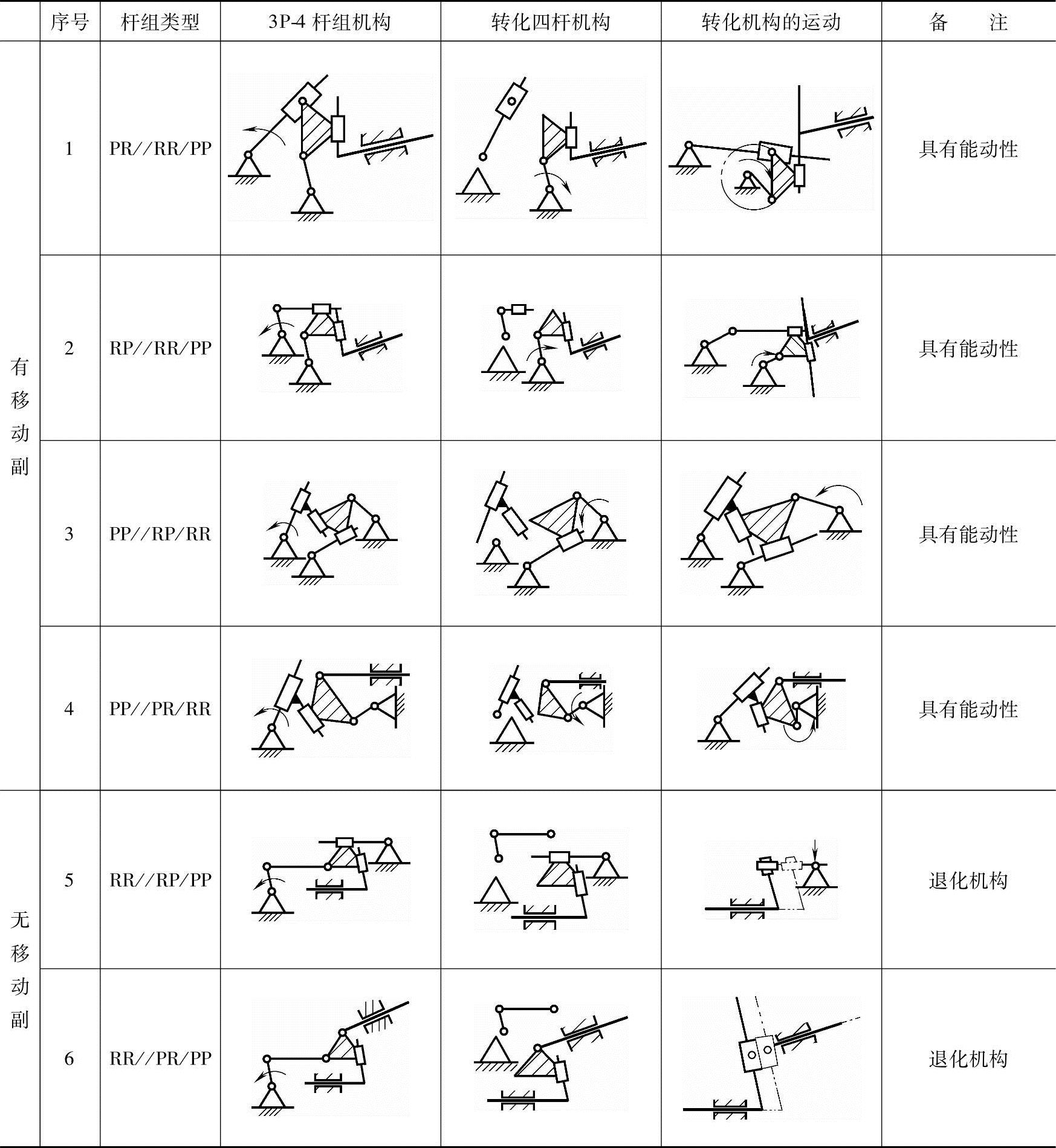
1)与主动件相连的外悬杆含有移动副。如表4-2中PR//RR/PP和RP//RR/PP构成的3P-4杆组机构及其转化机构,尽管其转化四杆机构的一个与机架相连的外悬杆为二移动副构件,使得原基础构件作平动,但其与主动件相连的另一外悬杆有一个转动副,从而调节了平动与转动运动间的干涉,故有确定运动。再如表4-2中,PP//RP/RR及PP//PR/RR构成的3P-4杆组机构及其转化机构,因为其基础构件作一般平面运动,故机构有确定运动。可见与机架相连的两个外悬杆上的移动副个数不大于2时,该机构具有实际能动性。
2)与主动件相连的外悬杆不含移动副。见表4-2,由RR//RP/PP和RR//PR/PP构成的3P-4杆组机构及其转化机构,与机架相连的两个外悬杆中有三个移动副。其中两移动副连架杆使基础构件作平动,当该平动基础构件与摆动的连架杆以移动副相连,或是与移动连架杆以转动副相连时,基础构件与该连架杆间无相对转动。故其上的转动副为虚约束而使机构退化,构成退化机构。尽管性能退化的机构仍可运动,但由于其包含的虚约束使得实际构件数减少,因此,该机构已不属四杆机构的研究之列。
故得到如下规律:应用降级法判定四杆机构能动性时,只需观察代号中后四个符号中的(即××//××/××中的××/××)移动副的个数,即与机架相连的两个外悬杆上含有两个以下移动副的四杆机构具有能动性。含有三个移动副时,使得机构性能退化已不属四杆机构。
表4-2 3P-4杆组机构的能动性
 (https://www.xing528.com)
(https://www.xing528.com)
3.3P以上四杆机构的能动性
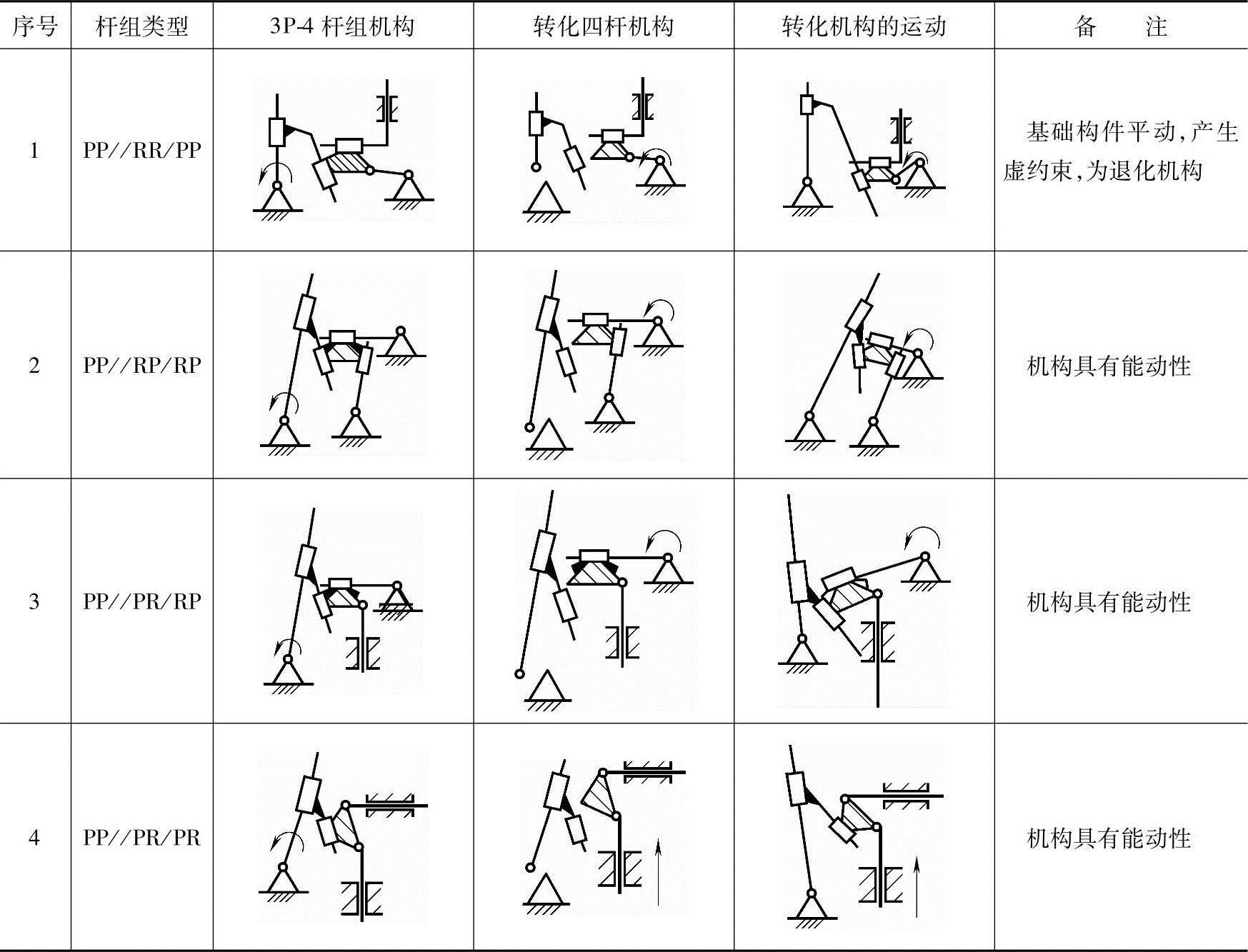
由以上3P-4杆组的能动性推理,在4P、5P、6P-4杆组代号中后四个符号中(即××//××/××中的××/××)含有三个移动副的应该剔除,其机构性能退化不属四杆机构。现对剩余的PP//RR/PP、PP//RP/RP、PP//PR/RP、PP//PR/PR杆组加以讨论。见表4-3,由其转化机构的运动发现,除PP//RR/PP构成的机构其原基础构件作平动而与主动件转动干涉外,其他三种杆组构成的机构因其基础构件作一般平面运动不会与主动件的转动产生运动干涉使得四杆机构具有实际能动性。
表4-3 3P-4杆组机构的能动性
由于5P、6P-4杆组的两个与机架相连的外悬杆上的移动副不小于3,故由5P、6P-4杆组构成的机构均不能成为F=1的四杆机构。注意:当两个外悬连架杆上含有四个移动副(即××//PP/PP)时其转化机构为四杆全移动副机构,其自由度为F=2n-p=2×3-4=2。
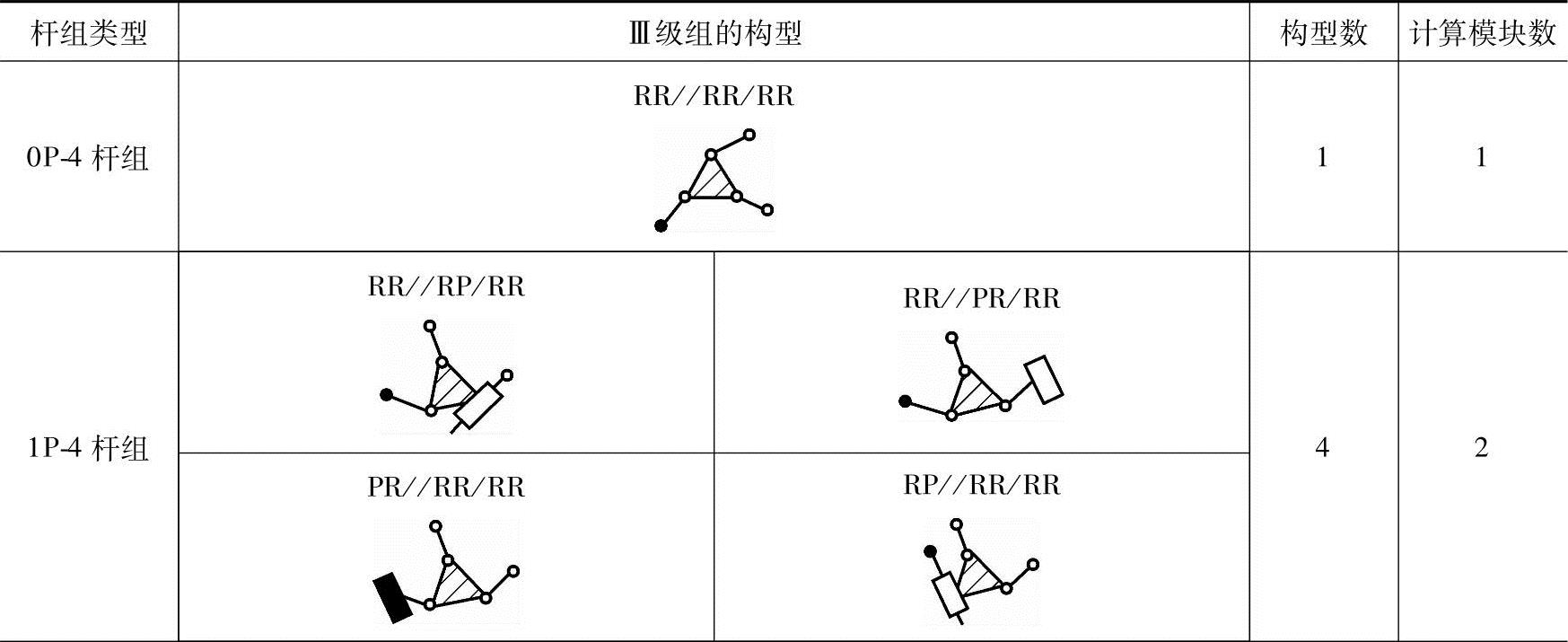
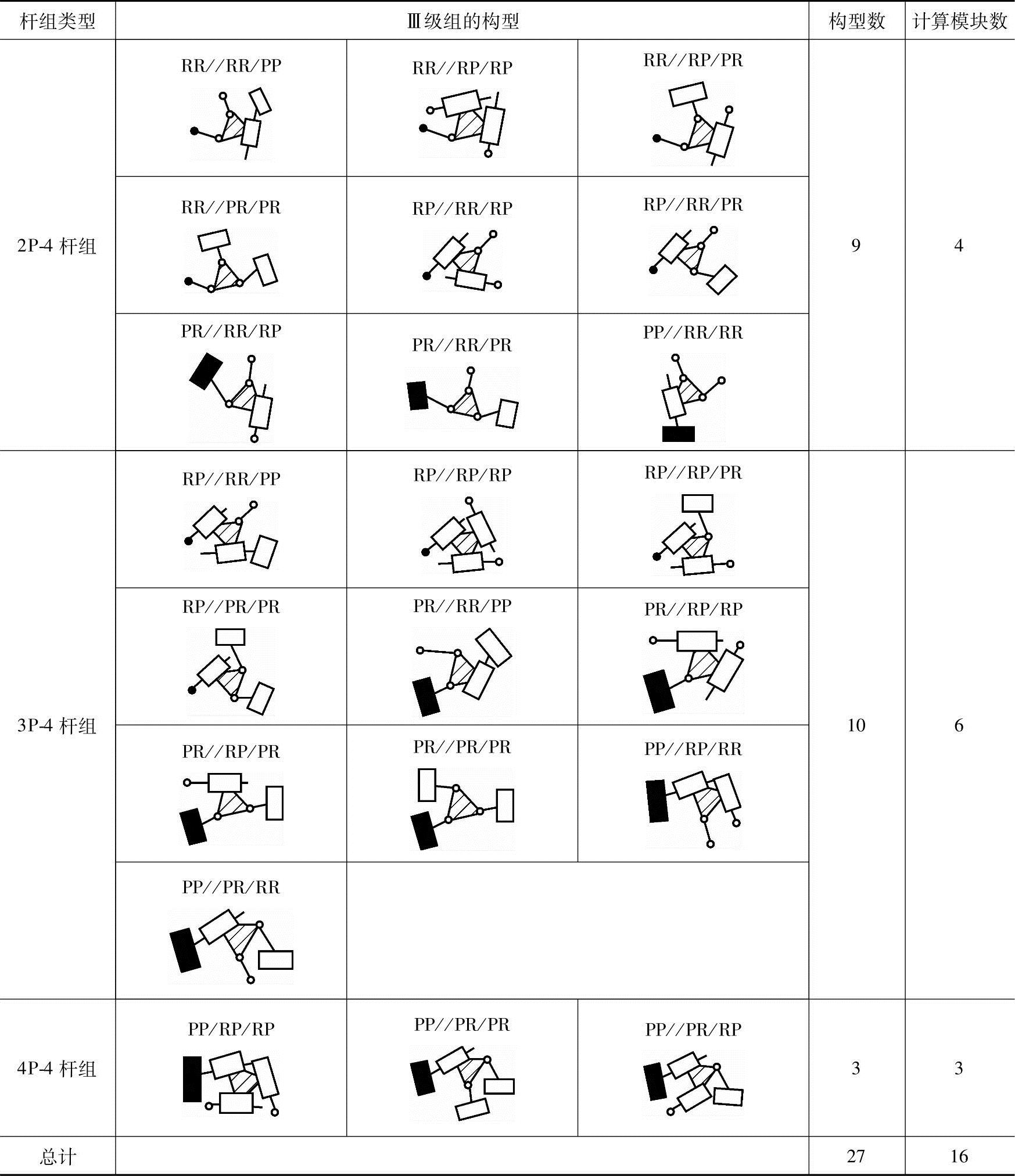
剔除表4-1中的无效杆组后,有效Ⅲ级组的构型及其结构图列于表4-4中,共计27种构型,16种杆组计算模块。
表4-4 四杆组的构型结构图(图中涂黑的运动副与主动件相连)
(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。