



如图4-4所示,排除不符合机构型综合因素的机构(虚线框内)后,得到A-1、A-2、A-3、A-4、A-5五种类型共13种有效的五杆机构,其机构自由度F=3n-2p=3×4-2×5=2。而图4-4中的A-6、A-7、A-8三类的各机构由于不符合机构型综合应考虑的因素,其机构性能由优变劣,由好变坏而发生退化。一般把这种由于构件和运动副序列变更使机构某些性能退化的机构称为退化机构。应该指出,退化机构并不一定是没有使用价值的机构。现分析这三类退化机构的运动。
1.A-6型机构(PP/PRR)
如图4-6所示机构中用三个移动副将构件2、3、4串联,因此三构件间无相对转动,故与构件1以转动副相连的构件2和5只能作同步转动。该机构的自由度F=3n-2p=3×4-2×5=2。如果机构中的转动构件为主动件的个数不大于1(图4-6a、b),该机构有确定的运动。如果以具有两转动副的构件1为机架(图4-6c),且以与机架铰接的构件2、3为转动主动件,只有当ω2=ω5时机构才能运动;当ω2≠ω5时机构将产生运动干涉。可见该类型的机构,只要不以两个转动构件同时为主动件,仍然是自由度F=2的具有确定运动的五杆机构。应该特别指出,当以转动构件2、3为主动件,ω2=ω5时,三个移动副串联的各构件间仍然存在确定的运动,此时该机构是一种同步转动机构。这种机构可用于轴心线间跳动偏差较大的两轴间的连接。
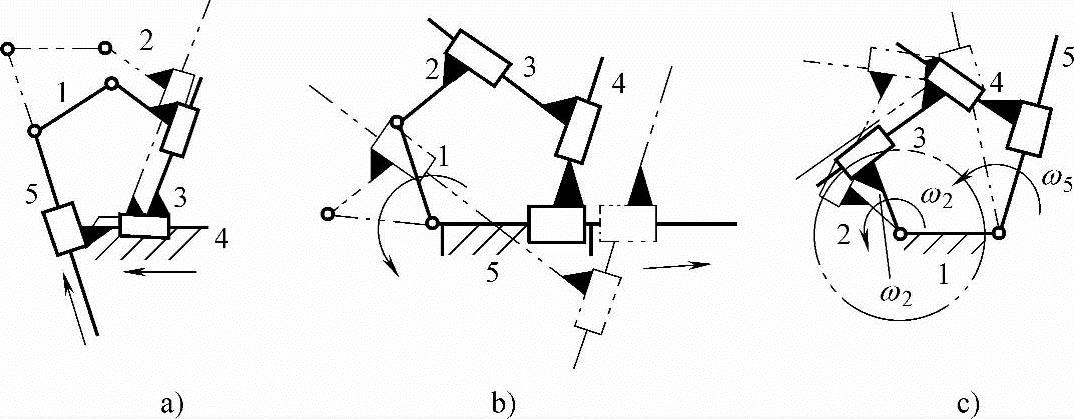
图4-6 A-6类型机构的运动
a)A-6-1:PP/RRP b)A-6-2:PR/RPP c)A-6-3:RR/PPP
2.A-7型机构(PP/PPR)
显而易见,由四个移动副连接的各构件间无相对转动,因此,唯一的以转动副相连的两构件间不可能产生相对转动而使得该转动副成为虚约束。如图4-7所示,若去掉虚约束计算机构自由度,其F=2,但该机构此时为全移动副四杆机构。由于转动副为虚约束,因此机构运动时由转动副连接的两构件间的角度不变。这是一种各构件作移动的平动机构。应该指出,由于转动副的调节作用,可用于补偿误差以降低制造和安装精度,而此种结构的机构在四杆机构的变换机构中是没有的。所以,尽管它是一种功能退化的五杆机构但却具有工程使用价值。(https://www.xing528.com)
3.A-8型机构(PP/PPP)
A-8型机构是一个全移动副五杆机构。公共约束为4,其机构自由度为F=2n-p=2×4-5=3。图4-8所示为具有三个主动件时机构的运动情况。它是一个具有放大行程的F=3的平动机构。
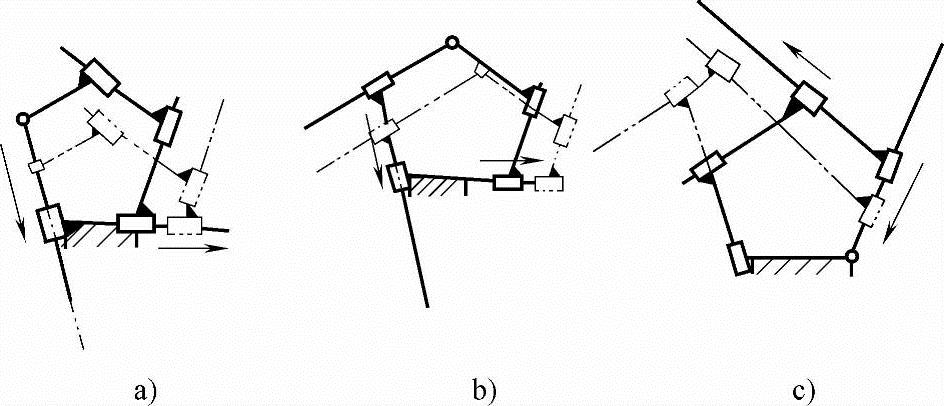
图4-7 A-7类型机构的运动
a)A-7-1:PP/RPP b)A-7-2:PP/PRP c)A-7-3:RP/PPP
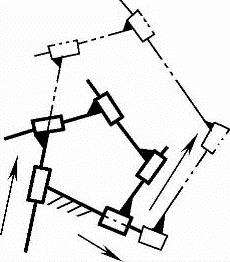
图4-8 F=3的全移动副五杆机构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。