



应用杆组构型使得机构变换变得简便容易。只要把选定的杆组中的外运动副与主动件、机架相连就可得到相应的机构。机构的自由度与选定的主动件的个数对应。
机构变换就是机构创新的过程。外运动副与不同位置的主动件相连以及选择不同的连架杆为主动件均可得到不同的机构,比较各机构的优劣即可选出性能优良的机构。如图2-13所示,将该8D-6杆组的不同的外运动副分别与主动件相连可得到不同的四种机构,同一种机构以不同的连架杆为主动件又可得到四种机构。故由该拓扑图可变换出16种机构。按表2-4中的杆组(n≤8)或图2-12各类杆组的结构图可变换出大量的机构。其理论上的数量为 。其中Wi为表2-4中第i类杆组带有的“W”标号的数量。可见,杆组构型的连杆组合数值计算方法提供的机构变换方法将为机构创新提供有效途径。
。其中Wi为表2-4中第i类杆组带有的“W”标号的数量。可见,杆组构型的连杆组合数值计算方法提供的机构变换方法将为机构创新提供有效途径。
图2-12 各类杆组结构图
图2-12 各类杆组结构图(续)
图2-13 8D-6杆组结构图及变换的机构
a)8D-6拓扑图 b)8D-6杆组结构图 c)主动件和机架 d)10杆机构图
根据运动分析提示,二杆组构成的机构的位置参数可通过列出的代数方程直接求解;而四杆组及其以上的杆组构成的机构的位置方程是多元非线性方程组,只能通过计算机迭代求解。因此,把二杆组构成的机构称为低级别机构;而把含有四杆组及其以上杆组构成的机构称为高级别机构。所以在分析设计机构时必须首先判别机构的级别。
判别机构级别而对机构进行拆分时,应进行高副低代和移动副变换,得到一个全转动副机构,如图2-14a、b所示。由于不同的主动件对应的机构级别不一定相同,因此,再以不同的连架杆为主动件进行杆组拆分。
1)以构件1为主动件的杆组拆分顺序为(图2-14b):二杆组2A(构件8、9)→四杆组4A(4、5、6、7构件)→二杆组2A(构件2、3)。故以构件1为主动件时为四杆组机构。(https://www.xing528.com)
2)以构件3为主动件的杆组拆分顺序为(图2-14b):二杆组2A(构件8、9)→四杆组4A(4、5、6、7构件)→二杆组2A(构件2、1)。故以构件3为主动件时为四杆组机构。
3)以构件6为主动件的杆组拆分顺序为(图2-14c):拆下二杆组2A(构件8、9)后其他构件无法拆分,得如图2-14c所示杆组,即6B-3杆组。故以构件6为主动件时为六杆组机构。
4)以构件9为主动件时无法拆下二杆组、四杆组及六杆组,只能得到如图2-14d所示的八杆组,即8C-8杆组。故以构件9为主动件时为八杆组机构。
应用杆组构型的连杆组合数值计算方法不但可以判别机构的结构类型,还可以构建任何数量构件构成的机构。例如用连杆组合法构建一个十二杆机构(本书未列出十杆组的构型)。
如图2-15所示,构建一个十杆组,将其与主动件和机架相连可得十二杆机构。由式(2-16)~式(2-19)求得:n=10,p=15,n2=5,n3=4,n4=1,pW=4,Lg=2。其特征值:[n2n3n4pWLg]=54142。由杆组拓扑图可知,表示杆组构型的数组为:N31-11W,N23-011,N33-01W,N43-001W,N4-0011W。由此绘制的结构图如图2-15a所示。若该杆组与主动件A及机架上的铰链B、C、D相连,则得到一个十杆组机构。该十二杆机构若以不同的连架杆为主动件时得到机构的级别是不同的,如图2-15b、c、d所示,机构分别以B、C、D的连架杆为主动件时均为四杆组机构。其中的虚线及其标号表示杆组的拆分过程。
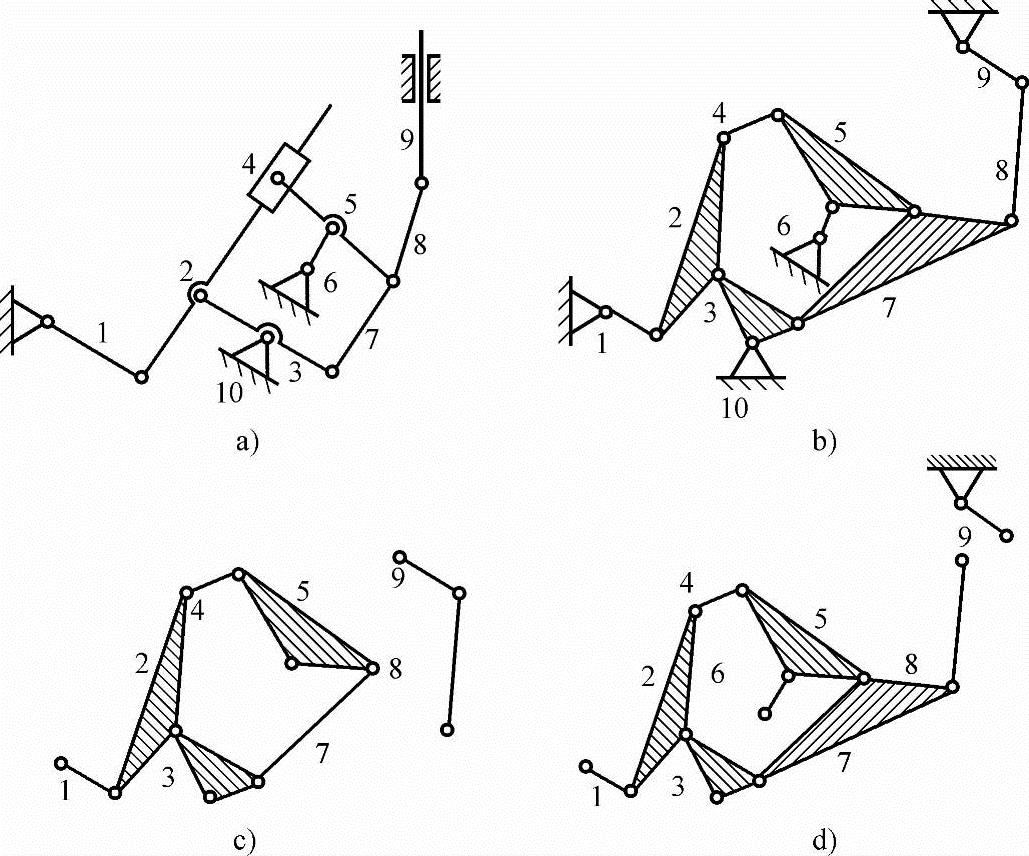
图2-14 判定机构的级别
a)带移动副机构 b)全转动副机构 c)6为主动件的杆组 d)9为主动件的杆
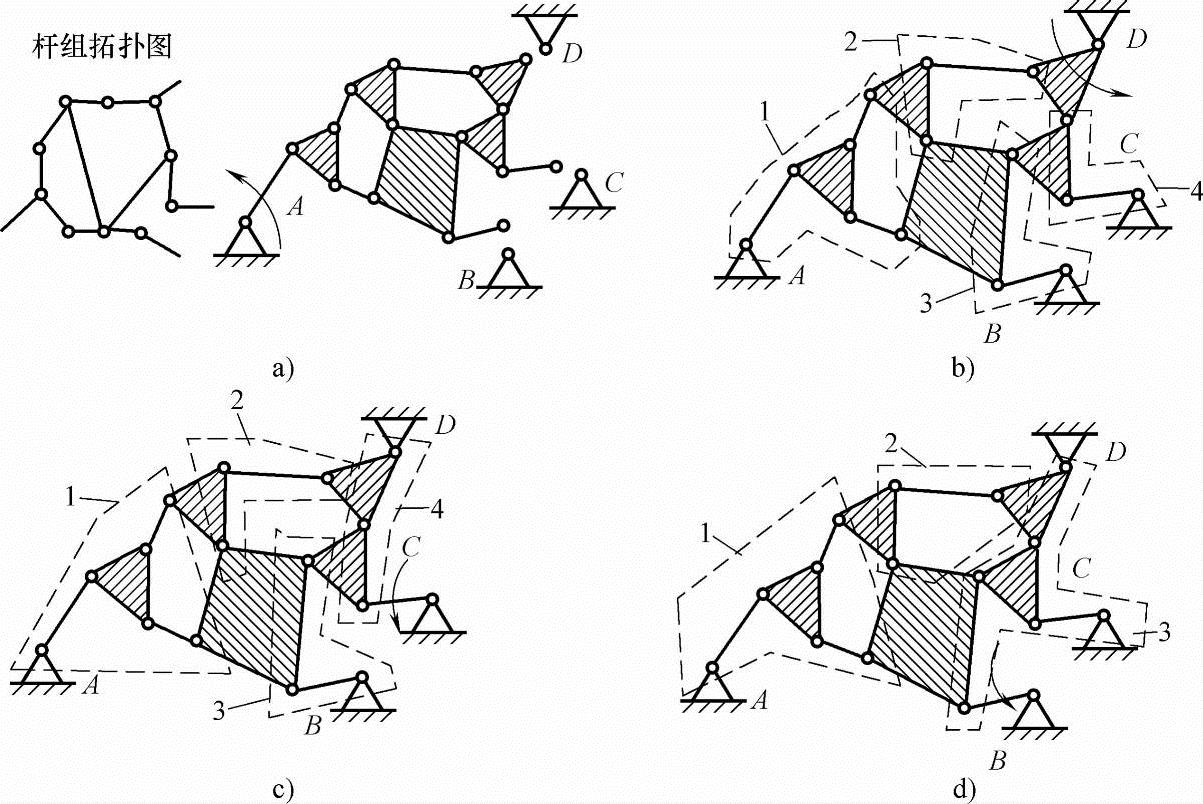
图2-15 十杆组进行的机构变换
a)A为主动件得十杆组54142 b)D为主动件:(1个四杆组+3个二杆组) c)C为主动件(1个四杆组+3个二杆组) d)B为主动件(2个四杆组+1个二杆组)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。