



Ⅲ级、Ⅳ级机构一定为非单环机构。该机构中由某单环封闭回路所建立的坐标方程数少于待求量数而无法求解,因此,必须按各封闭回路分别列出全部坐标方程。由于两个以上方程构成的非线性方程组不能用代数式直接求解,而必须采用数值迭代方法求其近似值,相对Ⅱ级机构其计算难度大大提高。因此,把Ⅲ、Ⅳ级机构称为高级别机构。
如图2-8所示机构是由主动件1、机架6与Ⅳ级杆组BCDEGF所组成的Ⅳ级机构。由回路ABCDEA和ABFGEA可列出四个位移坐标方程:

式(2-12)是以φ2,φ3,φ4,φ5为待求量的非线性方程组。采用Newton-Raphson算法
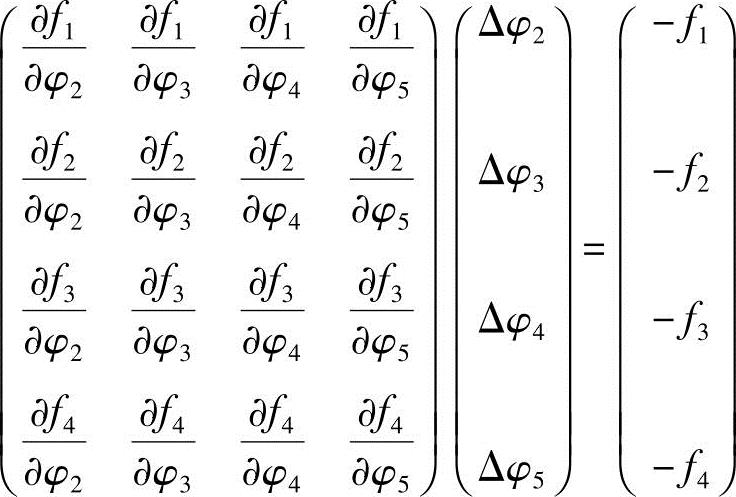
用式(1-5)来求解。先选定φi(0),由式(2-12)求出φi(0)处的fi及 (i=1,2,3,4;j=2,3,4,5),按下式求解各迭代增量Δφ2,Δφ3,Δφ4,Δφ5:
(i=1,2,3,4;j=2,3,4,5),按下式求解各迭代增量Δφ2,Δφ3,Δφ4,Δφ5:
根据式(2-12)求得
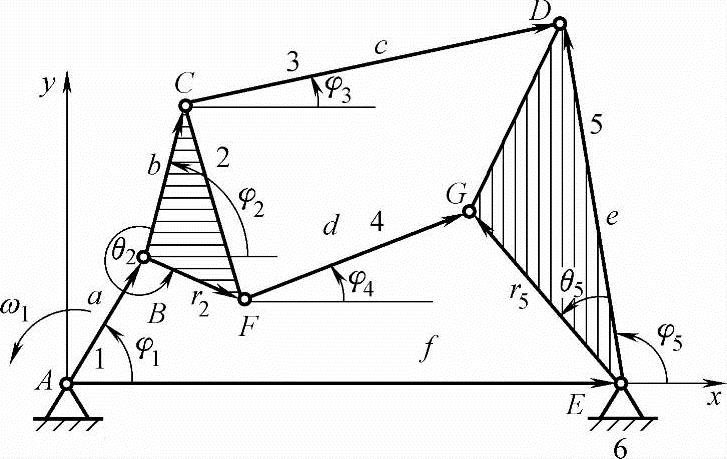
图2-8 Ⅵ级机构运动分析模型

得到迭代增量Δφ2(0),Δφ3(0),Δφ4(0),Δφ5(0)和下一次的迭代变量
φj(1)=φj(0)+Δφj(0) (j=2,3,4,5)
从而可计算出第一次迭代的位移函数fi(1)(i=1,2,3,4)。如此反复迭代直到第r次,若(https://www.xing528.com)
fi(r)≤εi(i=1,2,3,4)则终止计算。其中εi为各函数fi设定的计算精度。
该机构的速度及加速度分析方法与Ⅱ级机构类似,不再累述。
例2-1 Ⅲ级机构运动参数计算。
如图2-9所示,已知a=20mm,b=r3=50mm,c=40mm,d=30mm,f=70.7mm,θ3=68°,θ6=135°,e=10,ω=10rad/s,求主动件φ1=30°时的s, 。
。
解:根据图2-9所示各矢量,分别按矢量封闭回路ABCDE和EDFG列出位移方程

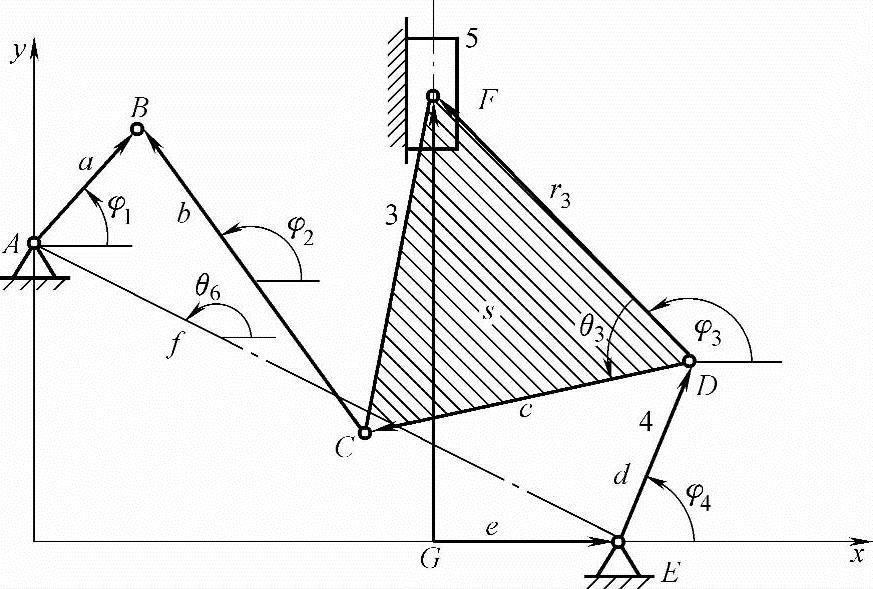
图2-9 Ⅲ级机构运动分析模型
根据Newton-Raphson算法,列出求解未知量增量的矩阵方程

用试凑方法绘制机构,量取各待求量的值作为初值,运用由GAUSS主元消去法构建的Newton-Raphson算法,输入初值后即可求解。
该机构的速度及加速度分析方法与Ⅱ级机构类似,不再累述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。