



【摘要】:Ⅱ级机构即全由Ⅱ级杆组所组成的机构。如铰链四杆机构、曲柄滑块机构和导杆机构均为Ⅱ级机构。已知机构尺寸,主动件的位置角φ1,其角速度ω1为常数,试分析M点位移、速度、加速度的求解方法。求解程序:首先建立机构的位置方程式,求出给定φ1时的构件2、3的位置角φ2,φ3。表2-2 曲柄滑块机构、导杆机构运动参数计算公式其他Ⅱ级机构的运动分析计算公式列于表2-2。
Ⅱ级机构即全由Ⅱ级杆组所组成的机构。如铰链四杆机构、曲柄滑块机构和导杆机构均为Ⅱ级机构。
图2-7所示为铰链四杆机构。已知机构尺寸,主动件的位置角φ1,其角速度ω1为常数,试分析M点位移、速度、加速度的求解方法。
求解程序:首先建立机构的位置方程式,求出给定φ1时的构件2、3的位置角φ2,φ3。将位置方程分别对时间t求导,得速度方程式和加速度方程式,并求得各构件的角速度ω2,ω3和角加速度ε2,ε3。最后列出M点的位置方程并对t求导即可完成。
由矢量封闭回路ABCD写出矢量方程
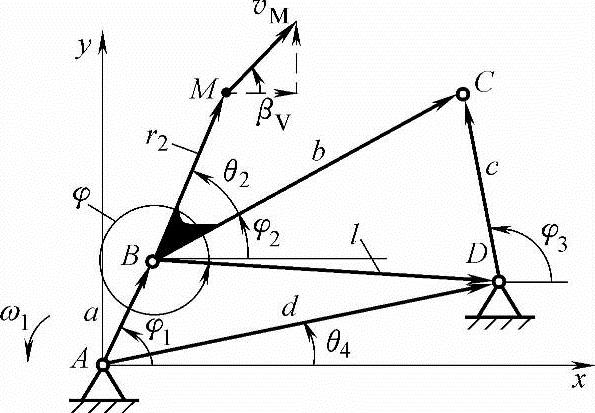
图2-7 铰链四杆机构运动分析模
a+b=c+d
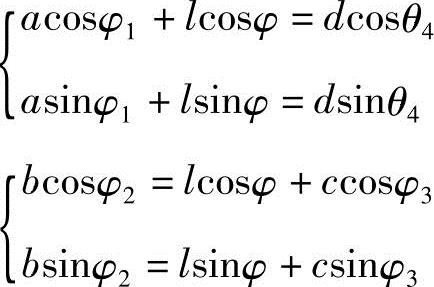
将上述矢量方程写成坐标方程

式(2-3)的待求量为φ2,φ3。由于该方程为φ2,φ3的非线性方程,为方便起见,在
图2-7中加辅助矢量BD,即l,φ。在封闭矢量回路ABD和BCD中得
a+l=d
b=l+c
其坐标方程为
解得
 (https://www.xing528.com)
(https://www.xing528.com)
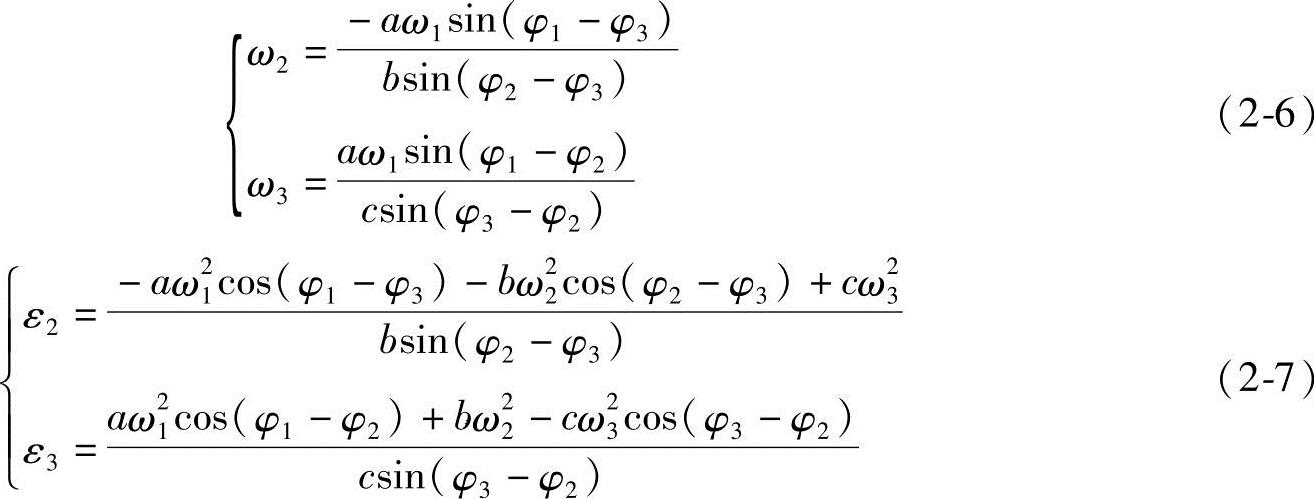
及

将式(2-3)对t求导,可求得
M点的坐标用xM,yM表示,则

式(2-8)对时间t求导得

式(2-9)对时间t求导得

若M点的速度大小及方向角用vM和βV表示;M点的加速度大小及方向角用aM,βa表示,则得

其他Ⅱ级机构的运动分析计算公式列于表2-2。
表2-2 曲柄滑块机构、导杆机构运动参数计算公式

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。