



1.产品与结构
βi-I/O-Link驱动器是一种带有闭环位置控制功能、采用I/O-Link总线控制的通用型驱动器,它可用于不需要插补的辅助轴,如刀库、分度台、机械手、输送装置的驱动。
βi-I/O-Link驱动器采用单轴独立结构。驱动器有3~AC200V输入标准型和3~AC400V输入HV型两类。标准型有βiSV4、βiSV20、βiSV40、βiSV80四种规格,HV型驱动有βiSV10HV、βiSV20HV、βiSV40HV三种规格。
βi-I/O-Link驱动器需要以I/O-Link从站的形式,链接到PMC的I/O-Link总线上,由PMC对其进行控制,每一驱动器需占用PMC的128/128点I/O。
βi-I/O-Link驱动器的外形和连接器布置如图7.4-26所示,驱动器外形及主电源、控制电源、电动机的连接方式均与单轴的βiSV伺服驱动器相同,故以下接口和电路设计要求与βiSV驱动器一致。
①主电源:βiSV4/βiSV20的输入连接器CZ7;βiSV40/βiSV80为CZ4。
②控制总线:连接CXA19A、CXA19B。
③制动电阻和过热检测触点:βiSV4/βiSV20连接CZ7和CXA20;βiSV40/βiSV80连接CZ6和CXA20。
④主接触器通断控制输出:CX29的输出触点应串联至主接触器线圈控制回路。
⑤急停输触点入:连接至CX30。
⑥绝对编码器电池:连接至CX5X。
⑦伺服电动机电枢:βiSV4/βiSV20连接至CZ7;βiSV40/βiSV80连接至CZ5。
⑧伺服电动机编码器:连接至JF1。
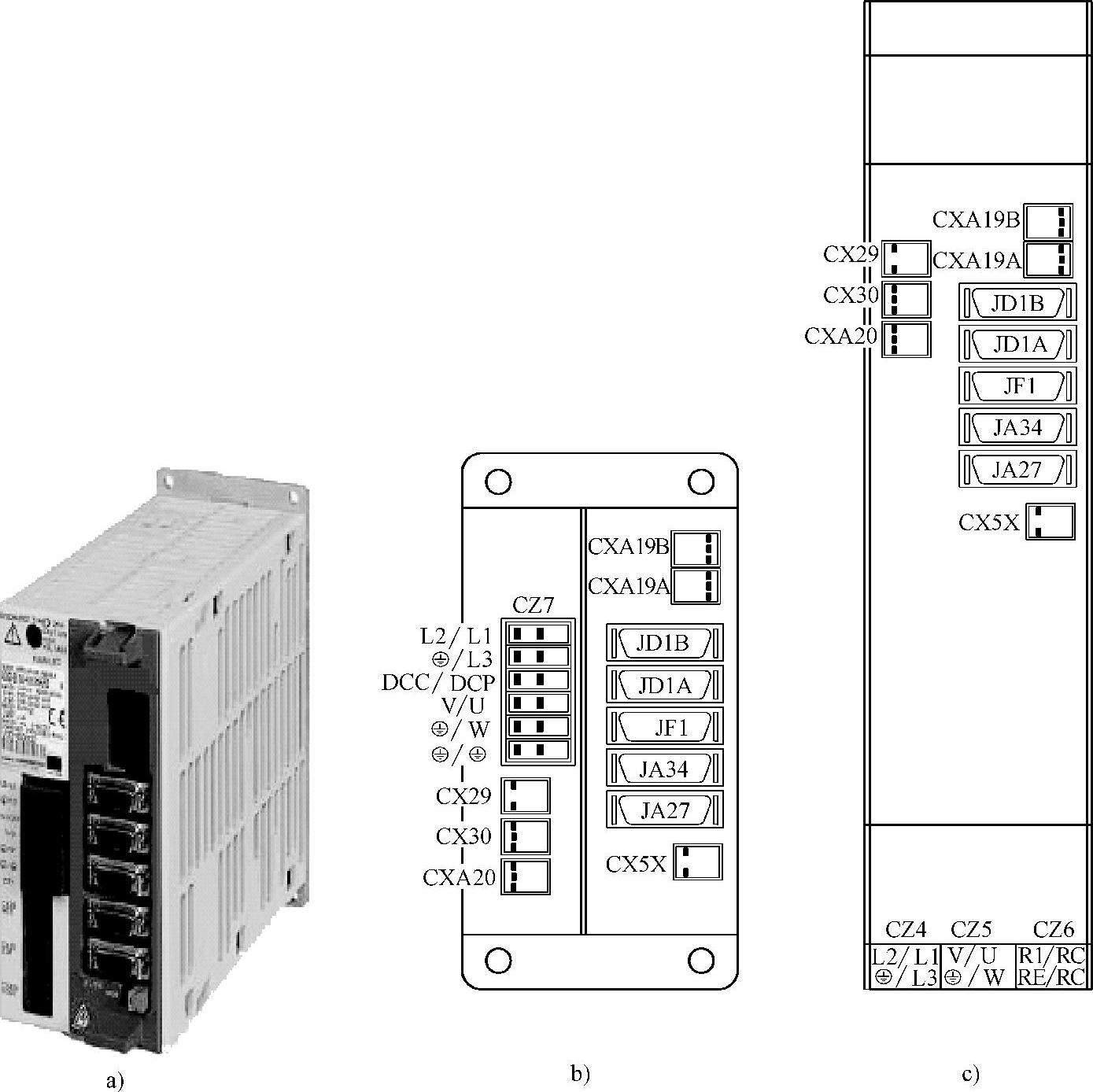
图7.4-26 βi-I/O-Link驱动器
a)外形 b)SV4/SV20 c)SV40/SV80
2.连接总图
在使用多个βi-I/O-Link驱动器的系统上,驱动器间的互连要求如图7.4-27所示,电路设计时需要注意以下问题。
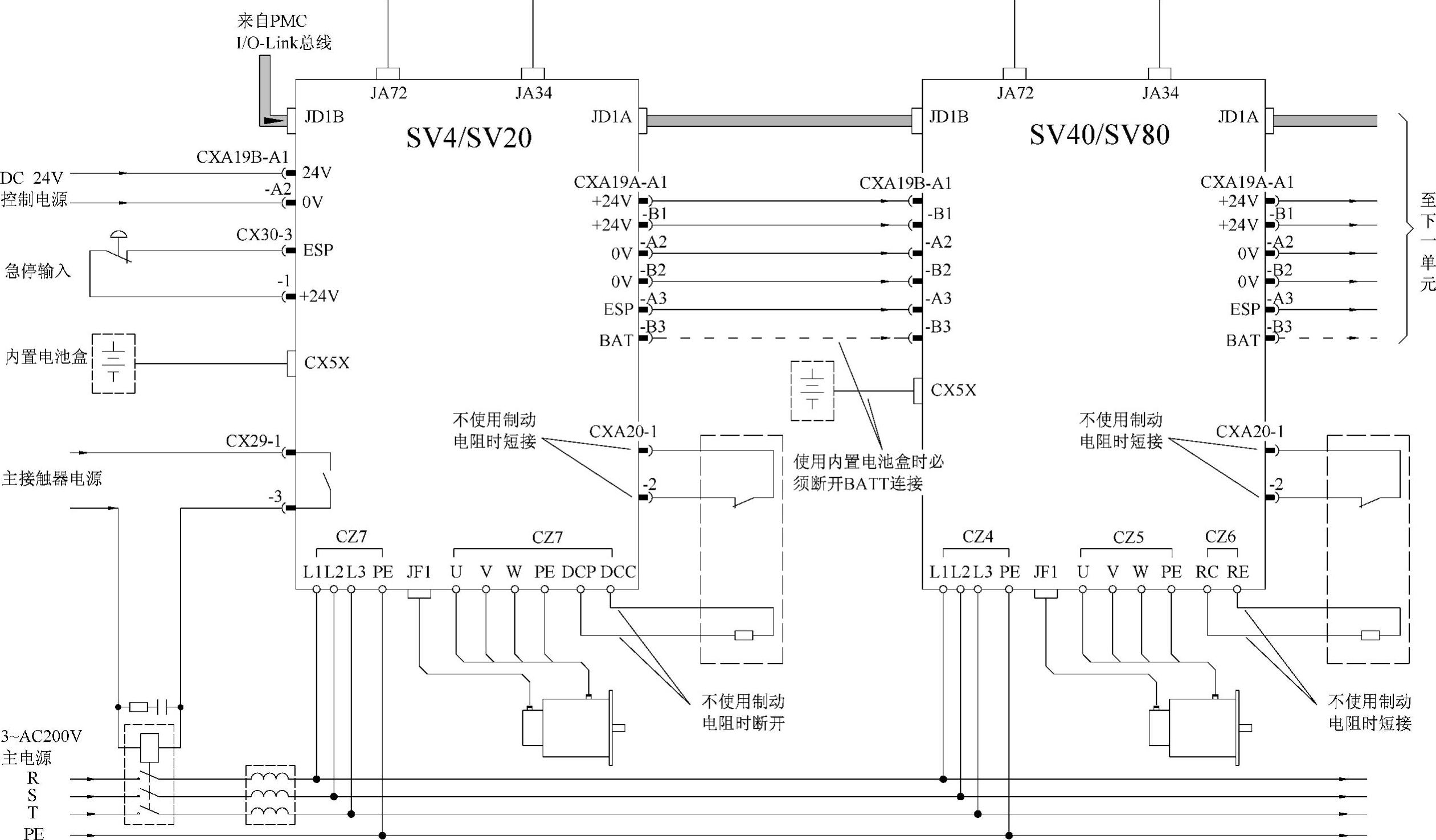
图7.4-27 βi-I/O-Link驱动器连接总图
①使用多个βi-I/O-Link驱动器时,其I/O-Link总线可像PMC的I/O单元一样进行串联,总线的连接要求与I/O单元相同,可参见前述说明。
②如多个驱动器共用主接触器控制主电源通断,其DC24V控制电源和急停输入也只需要连接至第1个驱动器的CXA19B、CX30上,其他驱动器可通过控制总线互连;驱动器的主接触器通/断控制输出触点,应按照图7.4-28串联后控制主接触器的通断。
③如果系统中的βi-I/O-Link驱动器用途、控制要求不相同,驱动器可通过公共的伺服变压器提供主电源,但每一驱动器都需要有独立的主电源通断控制电路,控制电源输入、主接触器通断控制输出、急停输入应独立,驱动器的控制总线一般不能互连。
④虽然,βi-I/O-Link驱动器的参数设定、调整可借助CNC的操作面板进行,但是,它本质上是一种利用网络控制的通用型驱动器,其闭环位置、速度、转矩控制均在驱动器上实现,因此,驱动器可独立使用,并可像其他形式的通用驱动器一样,连接以下用于运行控制的DI/DO信号。(https://www.xing528.com)
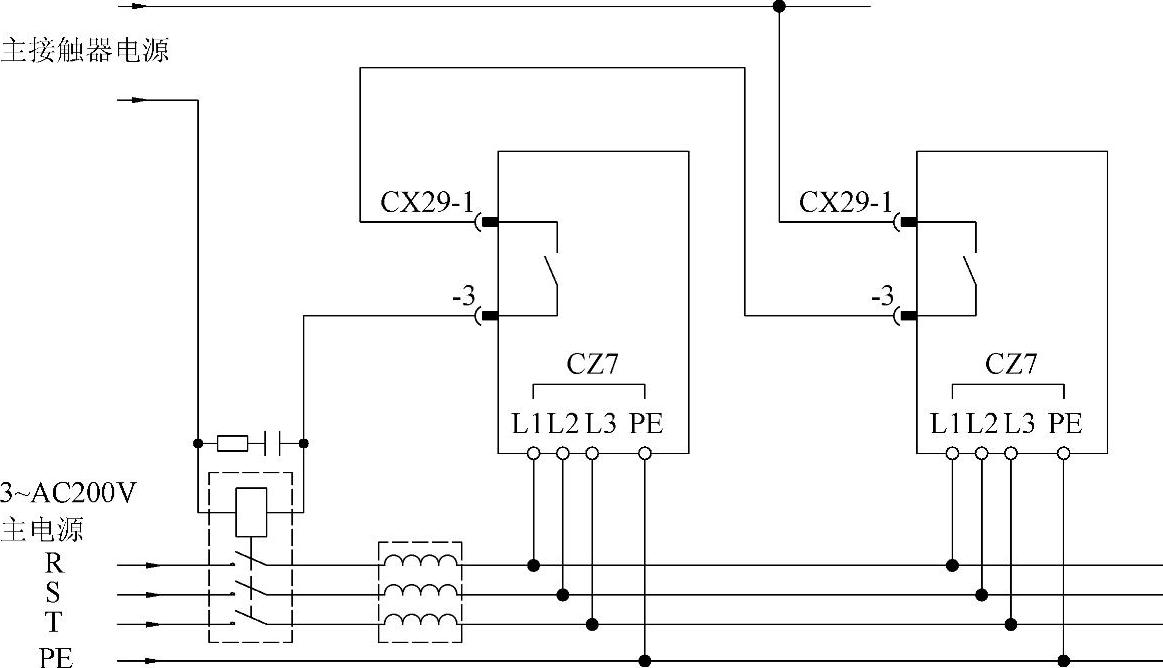
图7.4-28 主接触器的通断控制
3.DI控制信号
利用βi-I/O-Link驱动器的接口JA72,可连接图7.4-29所示的外部DI控制信号。
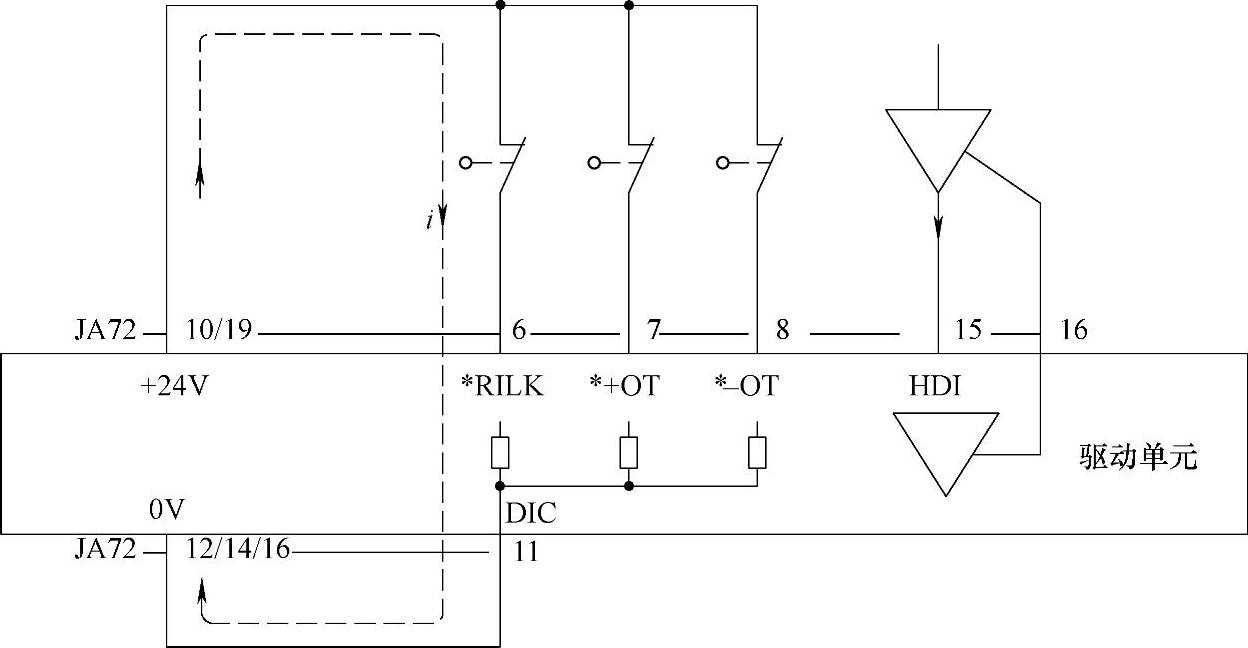
图7.4-29 DI信号的连接
①正向超程*+OT:该DI信号可用于正向运动禁止,通常使用常闭触点输入;触点断开时,辅助轴的正向运动被禁止。
②负向超程*-OT:该DI信号可用于负向运动禁止,通常使用常闭触点输入;触点断开时,辅助轴的负向运动被禁止。
③轴互锁与回参考点减速*RILK/*DEC:DI信号具有两方面作用,当驱动器选择回参考点操作时,输入用于参考点减速;当驱动器选择其他操作时,输入用于运动互锁。
④跳步切削Skip:驱动器的跳步切削高速输入,信号有效时,驱动器的剩余运动行程被取消。
驱动器对*+OT、*-OT、*RILK/*DEC信号的输入要求如下。
触点容量:≥DC30V/16mA。
触点断开漏电流:≤1mA/26.4V。
触点闭合压降:≤2V/8mA。
驱动器对跳步切削信号Skip的输入要求如下。
输入电压:DC-3.6~13.6V。
“1”信号输入:电压DC3.6~11.6V;电流2~11mA。
“0”信号输入:电压DC0~0.55V;电流-8mA。
4.手轮连接
βi-I/O-Link驱动器不但可通过I/O-Link总线通信命令控制,实现手轮进给、手动连续进给、回参考点、快速定位、切削进给等运动,而且也可连接手轮,直接实现手轮进给。
驱动器的手轮连接接口为JA34,手轮输入应为DC5V、A/B两相差分脉冲输入。JA34的连接要求如图7.4-30所示。如使用通常的HA、HB输出手轮,则需要选配FANUC手轮适配器A06B-6093-D001,将HA、HB输出信号转换为A/B两相差分脉冲。
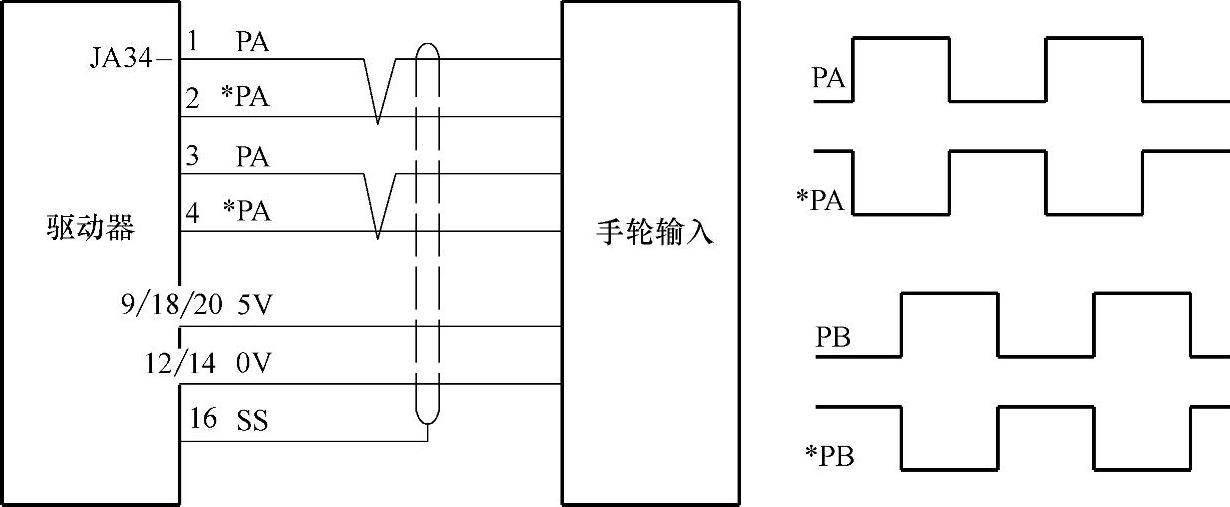
图7.4-30 手轮信号的连接
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。