



1.防护门控制
①基本要求。除了简单的国产普及型数控机床外,其他数控机床原则上都需要安装安全防护门,以防止切屑、冷却液乃至刀具、工件飞溅可能对操作者造成的伤害,确保操作者的人身安全。
安全防护门应具有安全锁定装置,确保在进行危险的生产过程、操作前,安全门始终处于锁定状态,防止未授权的进入或错误打开。安全防护门一旦打开,有可能产生危险的机械部件运动(如主轴、刀具的旋转和移动)必须立即停止。
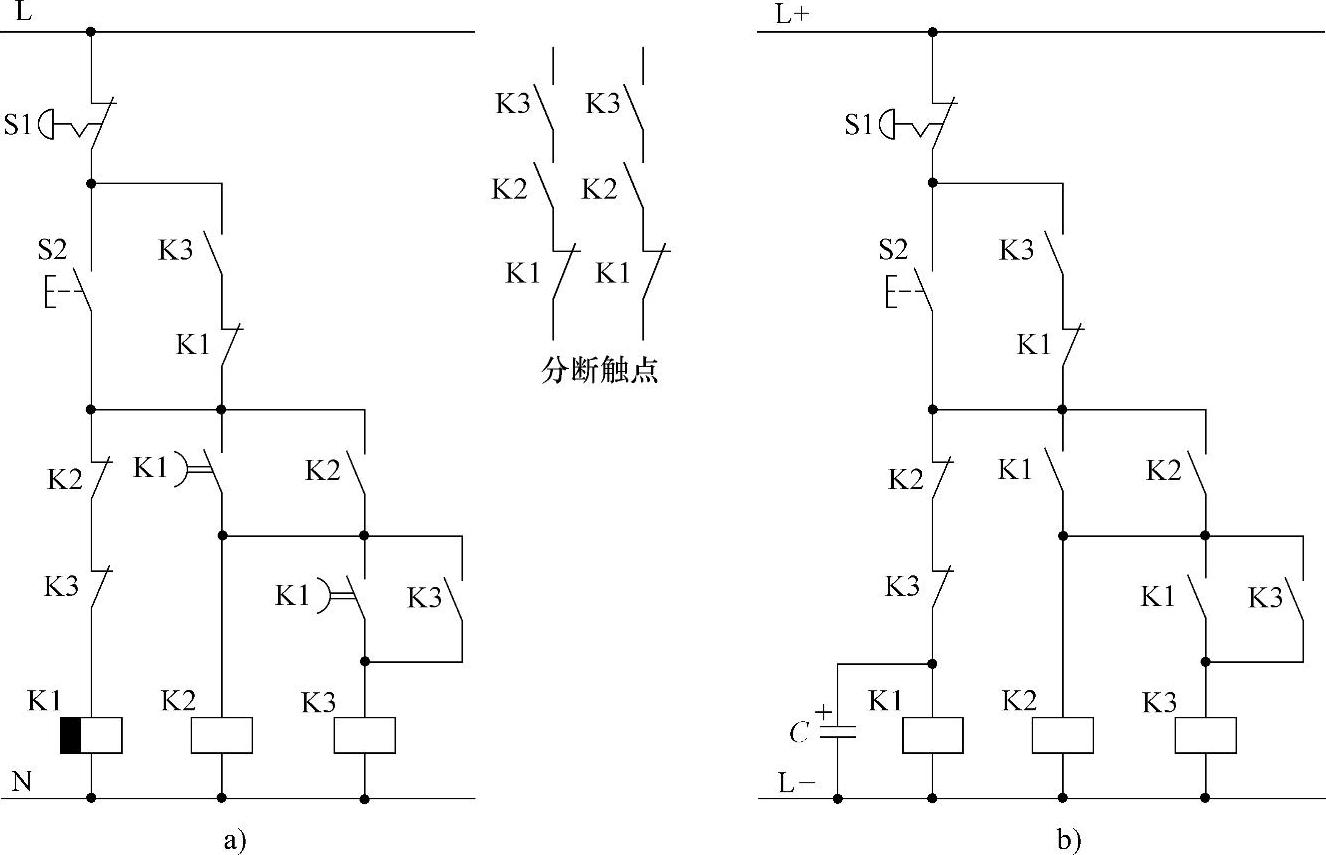
图5.2-9 标准安全电路
a)交流控制 b)直流控制
安全防护门控制装置必须带有操作保护机构,应通过密码、维修钥匙等方式防止意外操作。如使用无操作保护的常规控制器件,设计者至少应通过隐蔽安装的方法,来保证其操作安全。安全防护门控制同样需要使用安全电路和电器,并采用冗余设计的电路,其形式与紧急分断类似。
②控制电路。简单的防护门控制电路可通过前述图5.2-7b所示的电路实现,它需要采用2只带提前吸合常开触点和缓慢释放常闭触点的中间继电器。由于继电器不满足强制执行条件,且未采用行程开关触点的冗余输入,因此,在安全性要求较高的设备上,需要采用图5.2-10所示的电路。
在图5.2-10a所示的电路中,门开关采用了常开/常闭冗余输入控制。在任何时刻,只要防护门打开,S1将压合、S2将释放,起动继电器K1吸合、K2和K3断开,电路处于准备状态,分断触点输出断开。当防护门关闭时,S1释放、S2压上,K1断开、K2、K3通过延时释放的K1常开触点接通并自锁,安全触点输出接通。由于该电路中的K1在S1(门打开)释放后将立即断开,故S2(门关闭)必须在K1常开触点的释放延时内闭合,否则K3将无法接通;此外,当防护门关闭后,如果S1、S2出现抖动,也将直接导致K3的释放。由于电路对S1、S2的信号要求较高,因此,在实际机床上使用较少。
图5.2-10b为防护门标准控制电路。防护门打开时,S1压合、S2释放,起动继电器K1吸合并自锁、K2和K3断开,电路进入准备状态,安全触点输出断开。防护门关闭时,如只有S1(门打开)释放或S2(门关闭)压合信号,K1可始终通过自锁触点保持接通,当防护门完全关闭、S1释放、S2压合后,K2、K3将通过延时释放的K1常开触点接通并自锁,K1被断开,分断触点输出接通。由于电路中的K1起动信号和K2、K3的起动信号都有相应的自锁回路,因此,它对S1、S2的信号同步无要求,并消除了S1、S2抖动的影响,其可靠性较高、适用面较广。
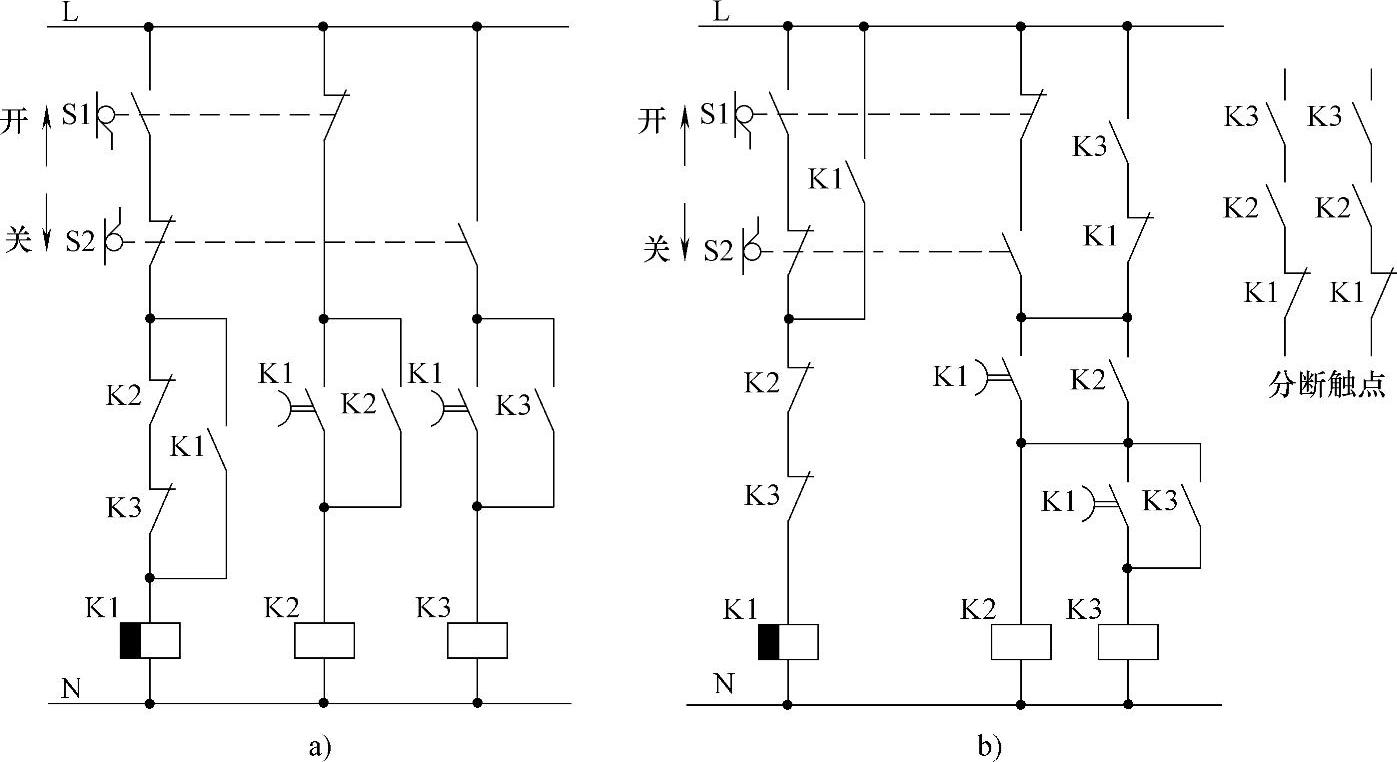
图5.2-10 防护门控制电路
a)参考电路 b)标准电路
2.双手操作(https://www.xing528.com)
(1)基本要求
数控机床的液压夹具、卡盘、自动换刀装置、工作台交换装置等部件的动作,可能对人体产生伤害或危险,它必须采用双手操作电路进行控制,以确保操作时操作者能使双手远离危险区域。双手操作按钮安装必须满足图5.2-11所示的条件。
安全标准规定,对于无保护罩的双手操作按钮,按钮的间距必须大于等于人手臂的长度550mm;如间距小于550mm,则必须安装保护罩;从而使得单手操作不仅不允许,而且也不可能。
双手操作一般采用蘑菇头按钮,但不能使用红色、也不能自锁。双手操作的安全电路对按钮的输入同步有规定的要求,两个按钮必须在0.5s内同时操作,才能接通安全触点,任意一个按钮单独操作或两按钮操作的间隔大于0.5s,安全触点输出即断开,相关部件不允许动作;此时必须同时释放两个主令电器后,才允许进行再次执行相关动作。
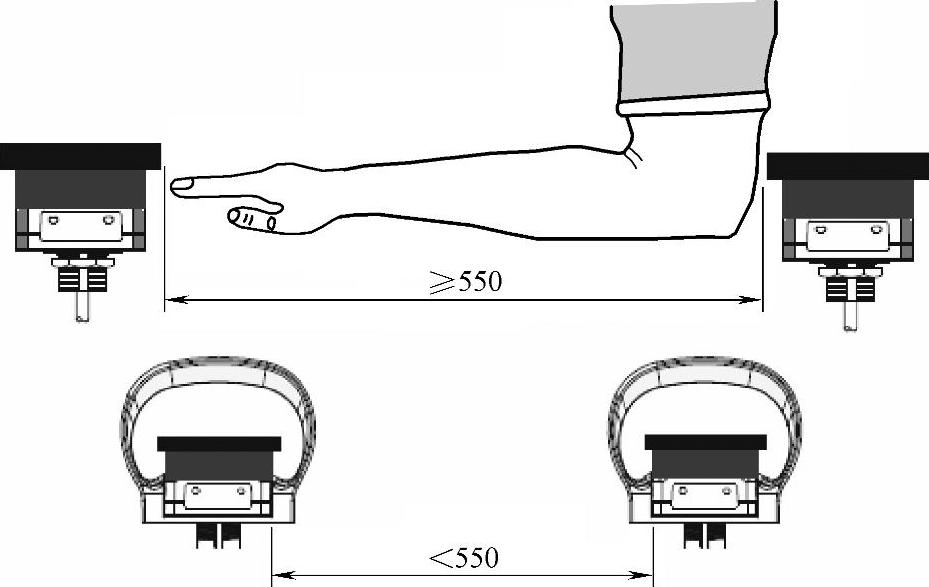
图5.2-11 双手操作按钮的安装要求
(2)控制电路
双手操作同样需要采用冗余设计的电路,它通常使用电磁式安全继电器组合装置或电子式安全继电器。作为参考,在功能要求相对较简单的场合,也可以使用图5.2-12所示的电路。
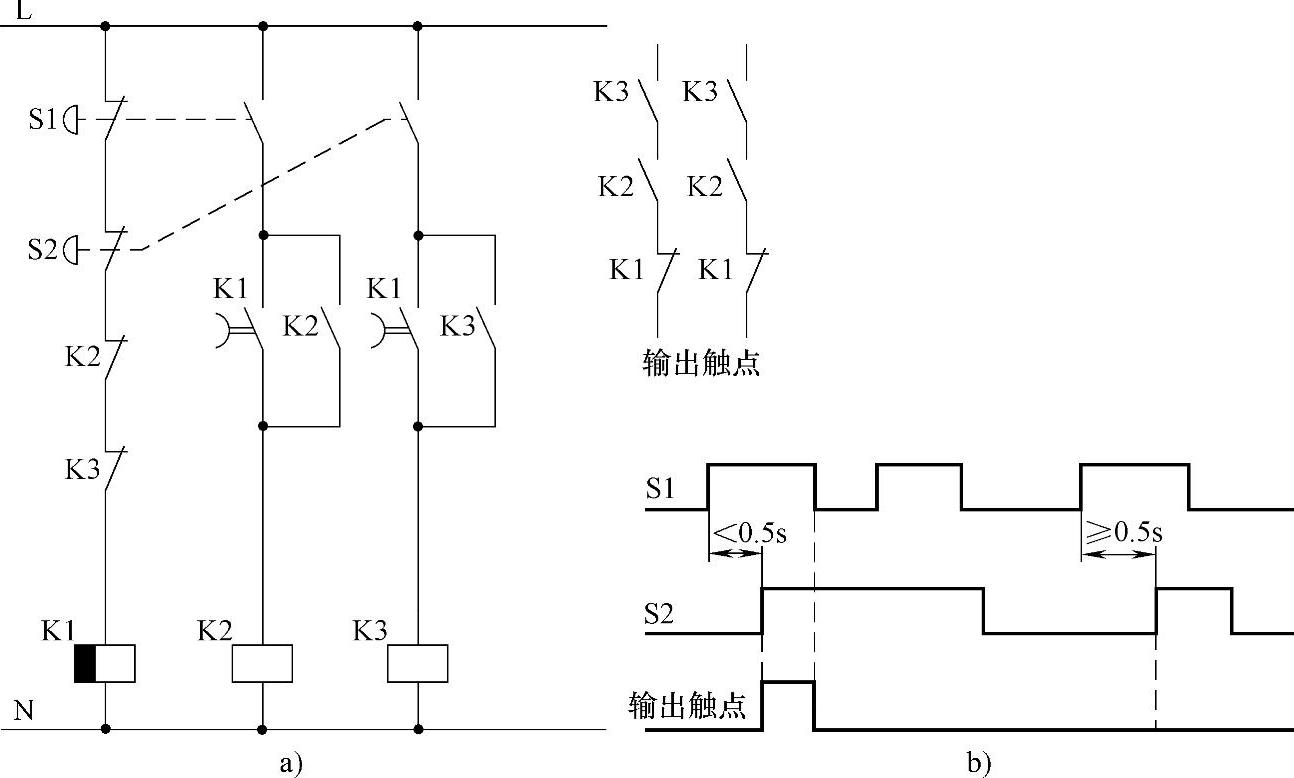
图5.2-12 双手操作电路
a)控制电路 b)输出信号
图中的断电延时时间继电器K1,用来控制S1、S2的输入同步,其常开触点的释放延时应调整为0.5s。
电路的双手操作触点输出信号如图5.2-12b所示。当双手按钮S1、S2同时释放时,时间继电器K1将吸合,电路进入准备状态。操作S1、S2中的任意一个,K1即断开,相应的控制继电器通过K1的延时释放常开触点接通并自锁;此时,如另一个按钮在0.5s内被操作,其控制继电器也可通过K1的延时释放常开触点接通并自锁;因此,输出触点将接通,直至S1、S2中的任意一个按钮被释放。如果在一个按钮接通期间,释放了另一按钮、并再次接通;或者,S1、S2的操作时间间隔大于0.5s;由于K1的延时释放触点已断开,故均不能输出触点信号。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。