



1.原理
 /△起动电路具有线路简单、动作可靠的优点,故在10kW以上空载、轻载起动的感应电动机上得到了广泛的应用。
/△起动电路具有线路简单、动作可靠的优点,故在10kW以上空载、轻载起动的感应电动机上得到了广泛的应用。 /△起动的电动机正常工作时为△联结,在3~380V电源供电时,每相绕组的额定电压应为AC380/400V,因此,它只能用于AC380/660V(或AC690/400V)、△/
/△起动的电动机正常工作时为△联结,在3~380V电源供电时,每相绕组的额定电压应为AC380/400V,因此,它只能用于AC380/660V(或AC690/400V)、△/ 联结的电动机,这点需要注意。
联结的电动机,这点需要注意。
 /△起动是异步电动机减压起动方式的一种,其本质是通过降低起动时的电压,来降低电动机的起动电流,其原理如图4.2-3所示。
/△起动是异步电动机减压起动方式的一种,其本质是通过降低起动时的电压,来降低电动机的起动电流,其原理如图4.2-3所示。
正常工作时为△联结的电动机,如果其额定电压为Ue(AC380/400V)、额定电流(线电流)为Ie,则工作时每相绕组上的相电压U=Ue、相电流 。当电动机采用
。当电动机采用 联结时,如输入电压仍为AC380/400V,则每相绕组上的相电压将降低至
联结时,如输入电压仍为AC380/400V,则每相绕组上的相电压将降低至 230V),由于绕组阻抗不变,其相电流也将降低至
230V),由于绕组阻抗不变,其相电流也将降低至 。
。 联结时的电动机线电流就是相电流,因此,它将降低至△联结时Ie的1/3,从而达到了通过减压、减小起动电流的目的。由于异步电动机的输出转矩与相电压的二次方成正比,所以,采用
联结时的电动机线电流就是相电流,因此,它将降低至△联结时Ie的1/3,从而达到了通过减压、减小起动电流的目的。由于异步电动机的输出转矩与相电压的二次方成正比,所以,采用 联结起动时,电动机的起动转矩也将下降至原来的1/3,故只能用于空载或轻载起动。
联结起动时,电动机的起动转矩也将下降至原来的1/3,故只能用于空载或轻载起动。
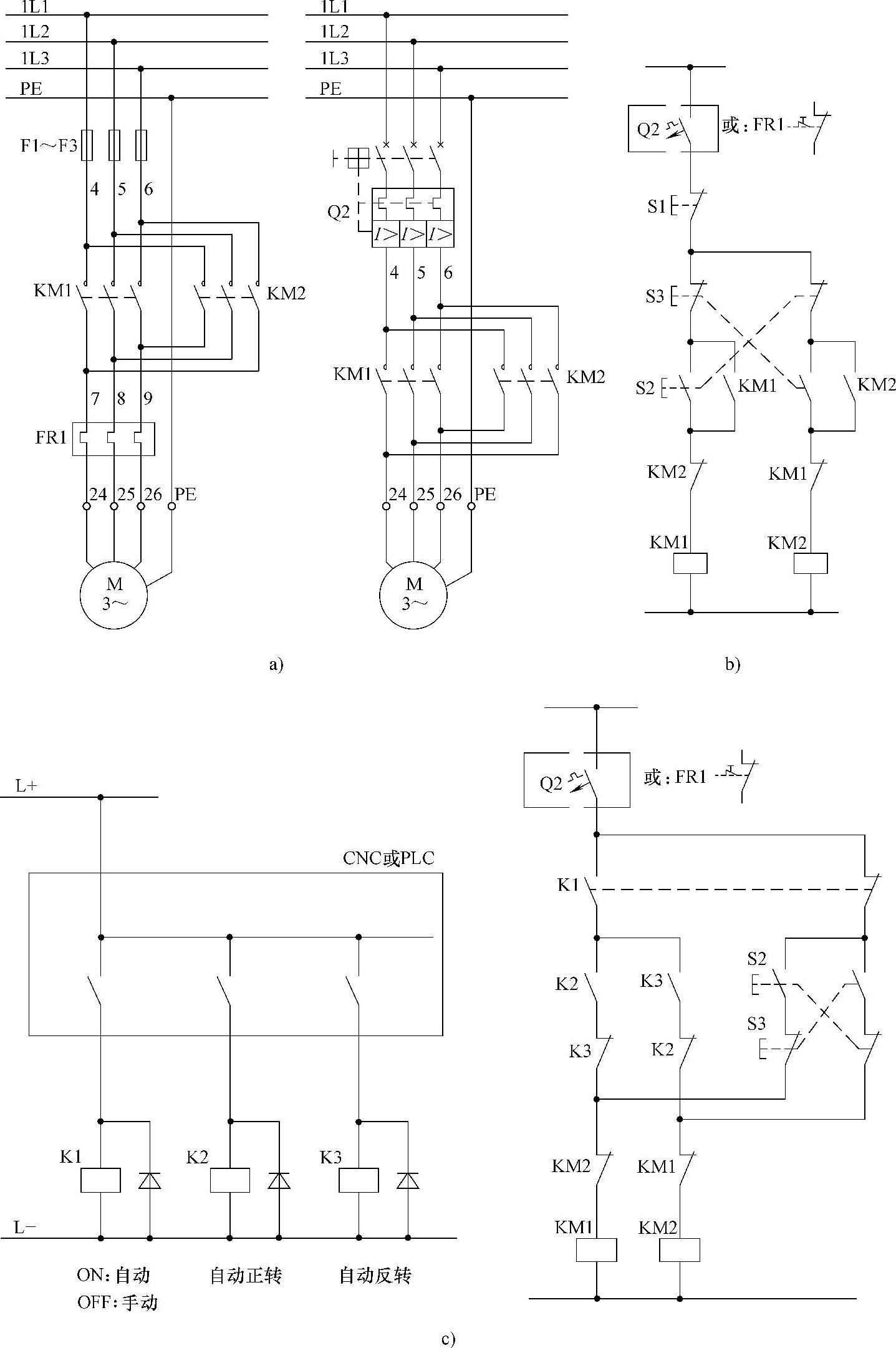
图4.2-2 电动机正反转控制电路
a)主回路 b)完全手动 c)联合控制
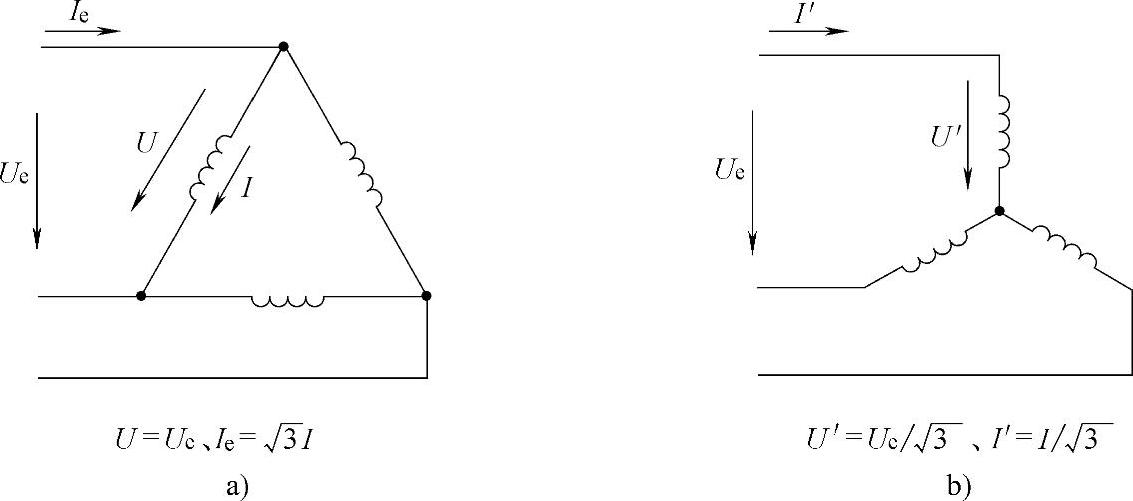
图4.2-3  /△起动原理
/△起动原理
a)△联结 b) 联结
联结
2.标准电路
标准的 /△起动电路如图4.2-4所示。
/△起动电路如图4.2-4所示。
对于200kW/360A以上的电动机起动,图中的KM2应通过单独的断路器或熔断器,直接连接到供电电源1L1/1L2/1L3上,电动机的主回路类似于图4.1-2所示的双速电动机,但2个电源支路所使用的断路器或熔断器的规格应相同,热继电器也只需要使用1只。
图4.2-4所示的电路中,当电动机通过S2起动时,首先将接通时间继电器KT,由于KT的常闭触点延时断开,故KM3接通,电动机切换到 联结;KM3接通后,KM1接着接通、自锁,并使KT保持,电动机在
联结;KM3接通后,KM1接着接通、自锁,并使KT保持,电动机在 联结下起动。当KT的延时到达,其常闭触点将断开KM3、常开触点将接通KM2,KM1仍保持,故电动机被切换到△联结,进入正常工作状态。
联结下起动。当KT的延时到达,其常闭触点将断开KM3、常开触点将接通KM2,KM1仍保持,故电动机被切换到△联结,进入正常工作状态。
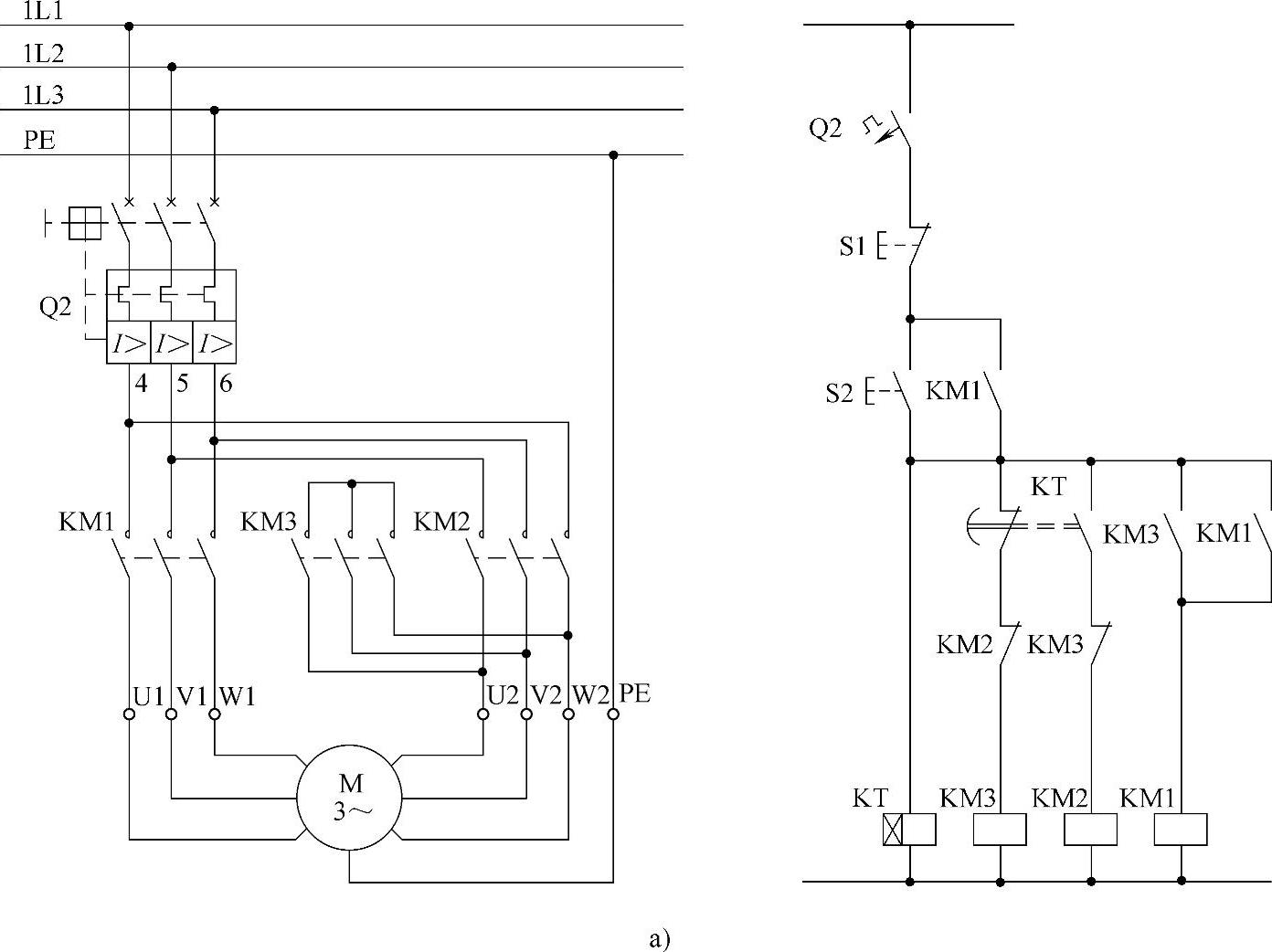
图4.2-4 标准的 /△起动电路
/△起动电路
a)使用断路器
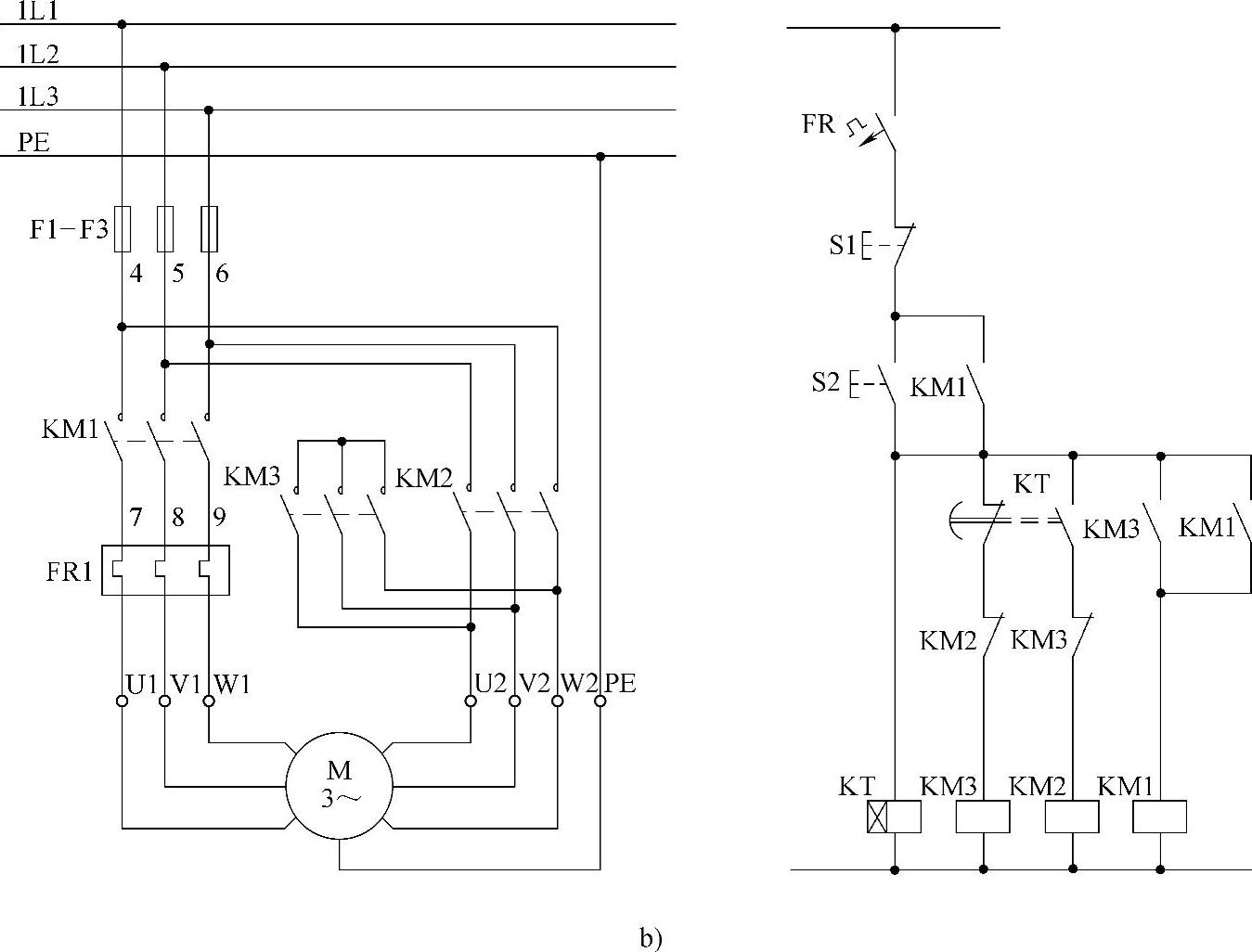
图4.2-4 标准的 /△起动电路(续)
/△起动电路(续)
b)使用熔断器、热继电器
标准 /△起动电路中的接触器KM1、KM2、热继电器,在正常工作时只需要承担电动机的相电流,因此,其额定电流可按照电动机额定电流的
/△起动电路中的接触器KM1、KM2、热继电器,在正常工作时只需要承担电动机的相电流,因此,其额定电流可按照电动机额定电流的 选择,KM1、KM2规格统一;接触器KM3只承担
选择,KM1、KM2规格统一;接触器KM3只承担 联结时电流,故可按照Ie/3选择。
联结时电流,故可按照Ie/3选择。
3.不合适的电路(https://www.xing528.com)
需要注意的是:国内相当一部分手册、教材提供了图4.2-5所示的 /△起动电路,它与上述标准电路相比,至少存在以下不足,电气设计时原则上不应采用。
/△起动电路,它与上述标准电路相比,至少存在以下不足,电气设计时原则上不应采用。
①成本高。图4.2-5所示的电路中,主接触器KM1需要承担电动机正常工作时的线电流,它必须按照电动机的额定电流Ie选择,其值是标准电路的3倍;且KM1、KM2规格不同,器件互换性差。此外,由于电路中的时间继电器KT常开、常闭触点分离,也不能使用具有公共连接端的时间继电器,而标准电路则不存在此问题。
②可靠性差。图4.2-5所示的电路中,如时间继电器KT的触点出现熔焊或卡住,按下按钮S2,KM1、KM2将被接通,电动机将在△联结下直接起动。而在标准电路中,由于KM1需要通过KM3接通,当KT触点出现熔焊或卡住时,KM3、KM1将无法接通,KM2的吸合即不会导致电源短路,也不会使得电动机起动。
③工艺性差。在标准电路上,KM2和KM1的电源进线直接并联,热继电器FR1和接触器KM1直接连接,故FR1可使用接触器组合安装的结构,器件安装、连接简单,工艺性好。但在图4.2-5所示的电路上,KM2的电源连接线在热继电器FR1和接触器KM1之间,因此,FR1不能使用接触器组合安装的结构形式,线路连接烦琐、工艺性差。
4.正反转电路
用于正反转运行的 /△起动标准电路如图4.2-6所示,它可以直接通过按钮S2、S3选择转向,并在不同转向时进行
/△起动标准电路如图4.2-6所示,它可以直接通过按钮S2、S3选择转向,并在不同转向时进行 /△起动。变换电动机转向时,需要先利用S1停止运行。
/△起动。变换电动机转向时,需要先利用S1停止运行。
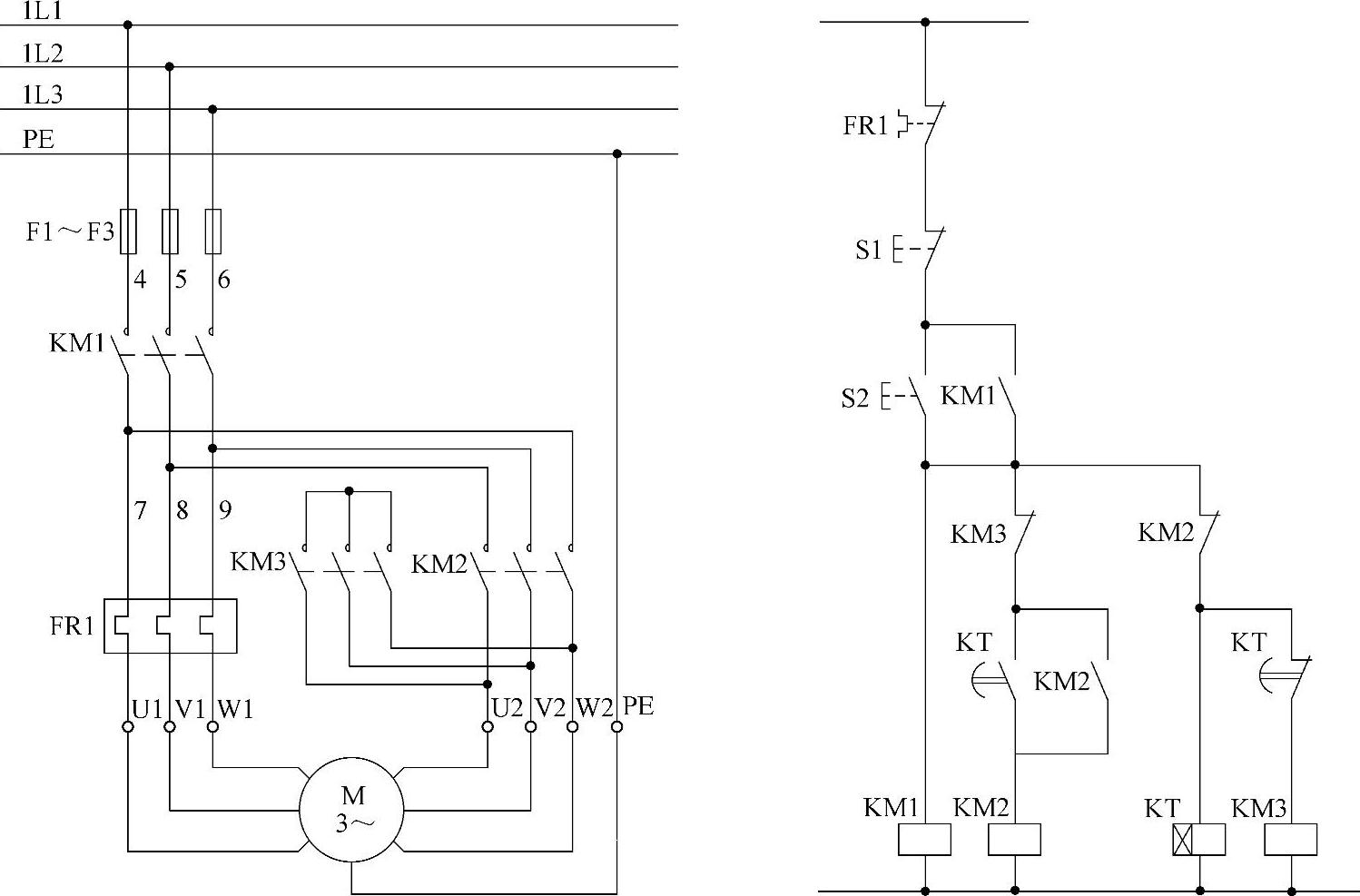
图4.2-5 不合适的 /△起动电路
/△起动电路
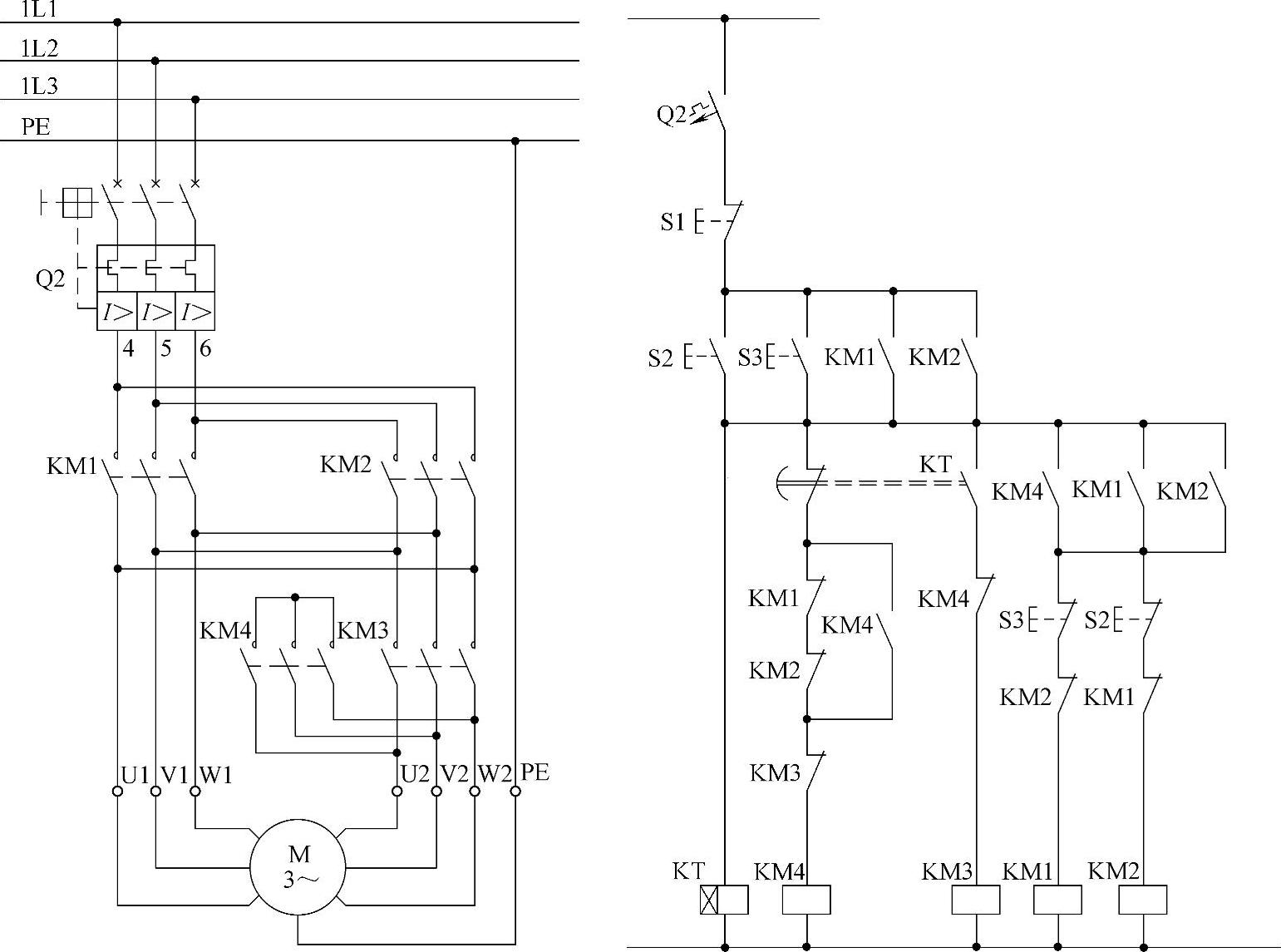
图4.2-6 正反转 /△起动电路
/△起动电路
5.不间断起动电路
以上线路存在的共同问题是:在 联结切换到△联结时,需要先断开KM3、然后才接通KM2,期间将有50ms左右的间隔,电动机绕组将有短时的无电流状态,很容易引起转速的波动;此外,如果在接通KM2的瞬间,电源相位正好与电动机的感应电势相位相反,还将产生很大的冲击电流,对电网和控制器件都十分不利。为此,当电动机需要频繁起动、对电路的可靠性要求较高时,需要采用图4.2-7所示的不间断
联结切换到△联结时,需要先断开KM3、然后才接通KM2,期间将有50ms左右的间隔,电动机绕组将有短时的无电流状态,很容易引起转速的波动;此外,如果在接通KM2的瞬间,电源相位正好与电动机的感应电势相位相反,还将产生很大的冲击电流,对电网和控制器件都十分不利。为此,当电动机需要频繁起动、对电路的可靠性要求较高时,需要采用图4.2-7所示的不间断 /△起动电路。
/△起动电路。
在图4.2-7所示的线路中,电动机起动时先按下S2,电路首先将接通KT和K1,接着通过K1,接通KM3、KM1,电动机利用 联结进行起动。当KT的延时到达,首先将接通过渡△运行接触器KM4,利用串接的电阻,使电动机进入过渡的△运行状态;接着,由KM4断开KM3,然后,依次断开K1、接通K2、接通KM2、断开KM4,将电动机切换至正常的△运行状态。这样,过渡接触器KM4可获得50ms左右的延时,使得电动机能够实现从
联结进行起动。当KT的延时到达,首先将接通过渡△运行接触器KM4,利用串接的电阻,使电动机进入过渡的△运行状态;接着,由KM4断开KM3,然后,依次断开K1、接通K2、接通KM2、断开KM4,将电动机切换至正常的△运行状态。这样,过渡接触器KM4可获得50ms左右的延时,使得电动机能够实现从 联结到△联结的平稳过渡。
联结到△联结的平稳过渡。
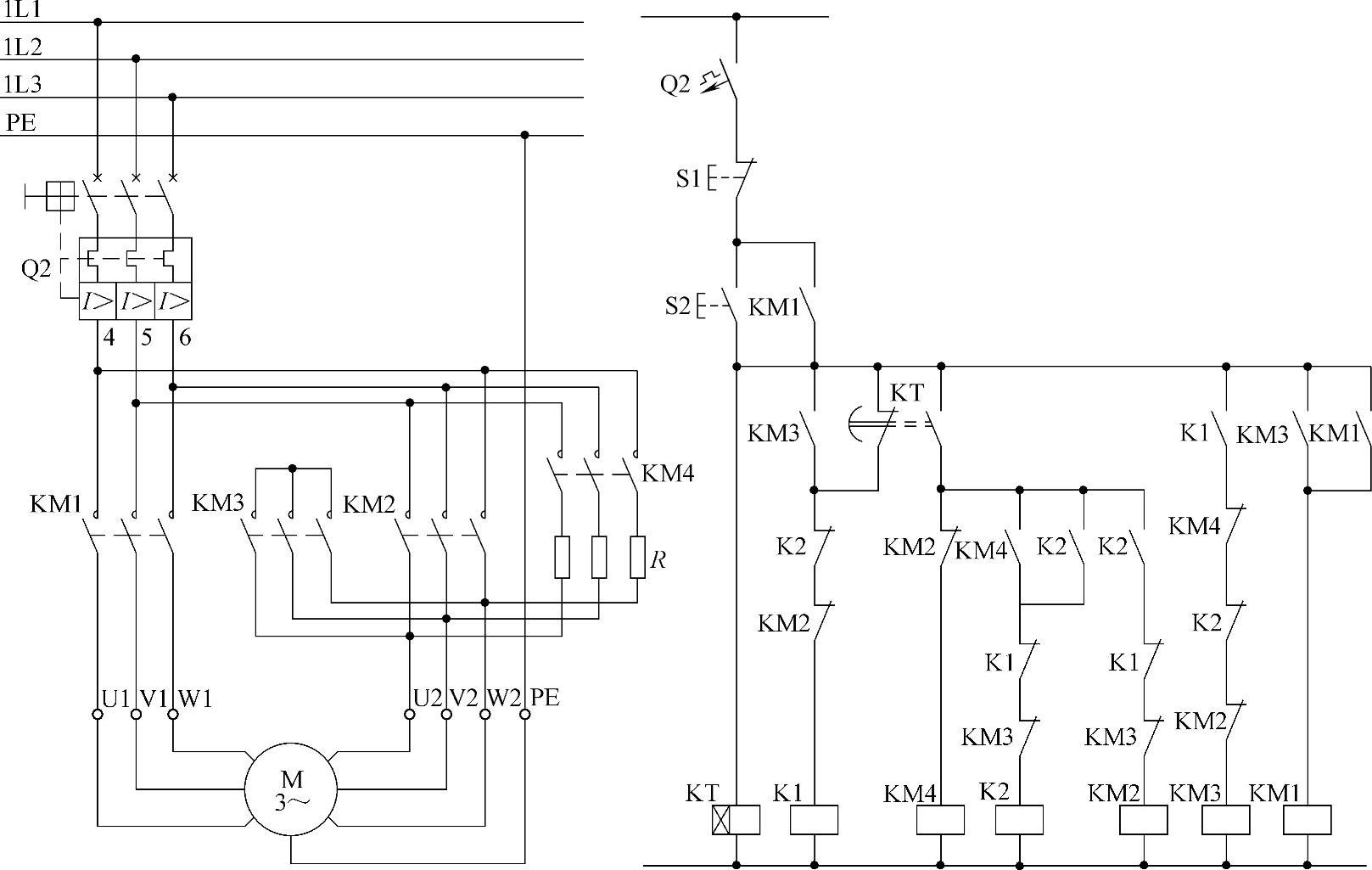
图4.2-7 不间断 /△起动电路
/△起动电路
图4.2-7电路中的KM3需要同时承担 起动和流经过渡电阻的电流,故应选择额定电流与KM1、KM2相同的接触器
起动和流经过渡电阻的电流,故应选择额定电流与KM1、KM2相同的接触器 ;KM4的额定电流可选择0.26Ie。为了将△过渡时的电流限制在额定电流的1.5倍以下,电阻R可通过下式确定:
;KM4的额定电流可选择0.26Ie。为了将△过渡时的电流限制在额定电流的1.5倍以下,电阻R可通过下式确定:
电阻的功率与起动频率有关,当每小时的起动次数少于12次时,可按照下式确定功率:
如每小时起动次数超过12次,但少于30次,则按照下式确定功率:
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。