



自从机器人走进人们的工作和生活以来,人们为机器人发展了各种类型的交互设备和交互方法,用于与人的沟通。仿人机器人发明的目的是为了更好地为人类服务,因此仿人机器人需要有效地与人进行沟通和交流。从最初的工业机器人完全地按照人类的指令进行工作,到现在的具有较高智能的仿人机器人自主地融入人们的工作和生活,甚至其最终目标是成为人类的伙伴,与人类共存,仿人机器人的交互功能和技术始终是机器人发展中的重点。由于仿人机器人的交互技术涉及的范围很广,因此本节只对仿人机器人的关键交互技术进行分析和研究。
1.人机交互技术的发展
在机器人学中,人机交互是指人与机器人之间的信息交流(Human-Robot Interaction,HRI)。人与仿人机器人进行交互的通道包括语言、视觉、超声波、红外线等,交互的方式比较自然,倾向于人与人的交互方式。与传统的人与计算机的交互方式(Human-Computer Interaction,HCI)不同,人机交互一般具有复杂、动态的控制系统,具有一定的自治性和认知性,并且在动态的真实环境下运行。
从人与仿人机器人交互的历史来看,人机交互是随着仿人机器人的不断发展而发展的。随着机器人从工业机器人发展到智能机器人以及更复杂的仿人机器人,也伴随着人与计算机交互技术的发展,人机交互也在不断进步。人机交互最初的人机界面是从机械手远程操作的形式开始的,它拥有复杂的机械装置,但是缺少感知和推理能力。通过一个单向的通信电路,人们可以通过一个手持操纵器来操纵机器人,因此它可以看作是人类身体的延伸和扩展。在工业领域,可以通过将已经编好的控制程序存储到工业机器人中,以指导机器人执行特定的动作。这时的人机交互比较原始,机器人缺乏必要的智能,只能机械地接受人类的指令。
20世纪60年代,监督控制被引入遥控机器人的直接操纵中。于是,机器人被赋予了一定的自治性,它可以自动地控制自身的一些操作。操作员可以发出一些高层次的命令,而机器人可以将其分解为一系列的低层次的基本操作并执行,这样大大减轻了操作员的工作负担。还有一种共享控制的形式,即机器人控制自身的一个或者几个自由度,而操作员控制其余的动作。共享控制分给了机器人一定的自治性,机器人可以对分配的这些方面拥有自主权利,自动地做出决策。目前,要想达到机器人的完全自治还比较困难,这种半自治的交互方式是研究的重点。外国科学家相继推出半自治的人机交互系统,例如德国卡尔斯鲁厄大学研究的机器人系统,可以通过语言、头部姿态和手势指点进行交流;日本Keio大学提出一种人机交互主动界面——语音对话系统,它的特点是机器人不仅可以接受用户的显示输入(如语音命令等),而且可以从用户的隐式输入(如表情、语气、语调等)判断声音的方向以及用户的距离和位置;Bischoff设计了一个具有人类特点的交互系统,它以自然语言为主,可以通过手势、触觉以及机器人肌肉运动感觉等与人类进行交流。国内在人机交互系统的研究上也取得了较大的成就,例如中科院研制的仿人机器人就有语音识别和语音控制功能;上海交通大学将手势识别系统应用到仿人机器人中。
总的来说,人机交互系统的理论和实践研究已经取得了很大的发展,但是仿人机器人不再面向简单的给定任务,而是面向与复杂环境的交互,强调智能和个性化的情感表达。在与复杂环境的交互过程中,仿人机器人不仅要具有与人类相似的“看”、“听”、“说”能力,而且要具有一定的智能和情感能力,同时还要能够从交互过程中进行学习,以提高自身的交互能力。因此,目前对于满足仿人机器人要求的、具有较高智能水平和自治性要求的交互系统仍缺乏足够的研究。下面介绍两种新的应用到仿人机器人的人机交互系统:选择性感知系统和智能感知系统。
2.选择性感知系统
仿人机器人拥有由较多的传感器组成的复杂感觉系统,具有更多的类似人类的技能,需要处理大量来自环境和自身的感知信息。对大量环境信息的实时性处理和快速响应成为仿人机器人研究和发展的一个难点。因此,研究实现高效率的感知策略和方法,赋予机器人更有效、更强的感知环境的能力,成为一项很迫切、很有意义的任务。
为了解决上述问题,可以从两个方面入手:一方面提高仿人机器人的计算能力,采用具有更强大处理能力的硬件设备,但是受到目前硬件发展水平的限制;另一方面是提高感知信息的处理效率,将有限的计算能力集中到需要的感知信息处理上。选择性感知方法的主要思想是通过选择和处理与任务或者兴趣有关的部分环境信息,过滤掉大量无关信息。选择性感知是生物界的一个普遍现象,也是解决海量信息选择和过滤的一种有效方法,为处理大量的感知信息提供了思路。目前,许多研究人员对选择性感知方法进行了研究,取得了令人满意的成果。其中,基于选择性注意的感知方法日益受到重视。
基于选择性注意机制的感知方法的总体结构大致可以分为注意机制和支撑系统两个部分,如图9-23所示。注意机制部分包括注意控制、注意窗口、过滤器以及联想记忆等。注意控制部分在整个感知处理过程中起到了集成和管理的作用,它规划调度模型中各种不同的组件执行完成任务,并在需要时调用支撑系统,以辅助任务的执行。注意控制部分首先获得要执行的任务或者意图,经过分析得到与任务相关的知识,指导注意窗口序列的生成,通过联想记忆实现指定的任务或意图。同时,注意控制部分通过过滤器,过滤掉与任务无关的感知信息和已经被识别的分析信息,减少大量的处理成本。支撑系统主要由传感器管理、信息融合功能和知识库等部分组成,它们为感知过程提供必要的支持。(https://www.xing528.com)
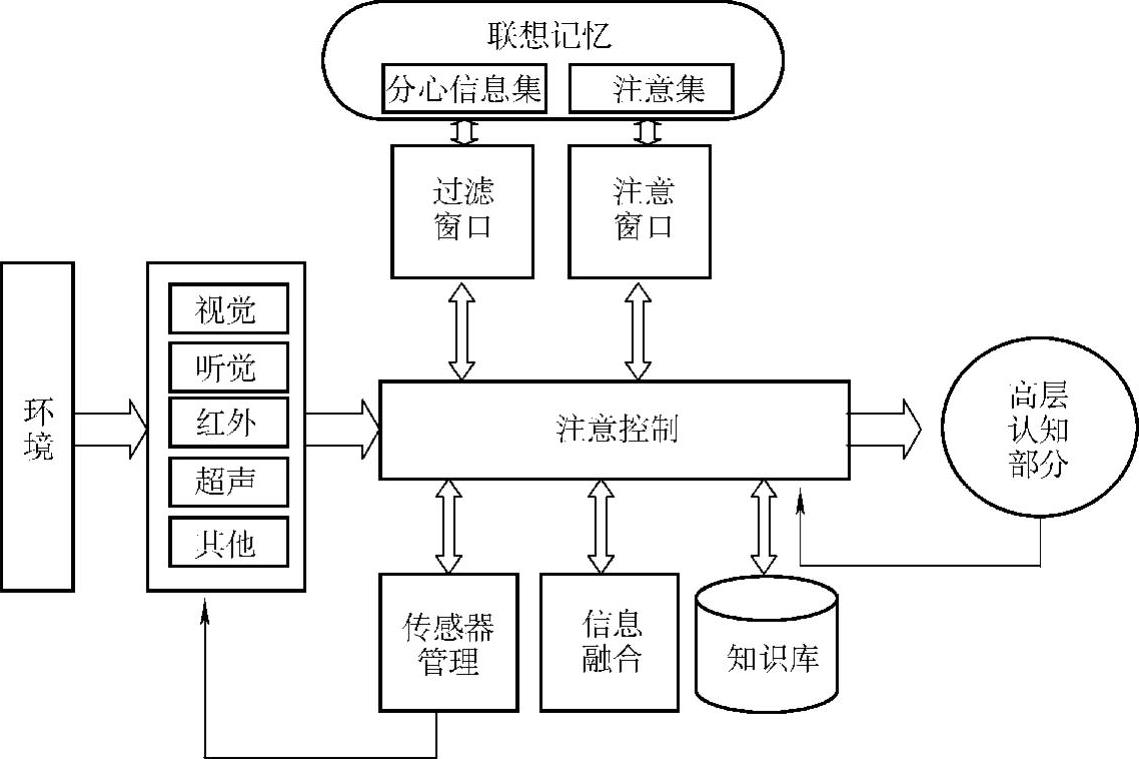
图9-23 基于选择性注意机制的感知方法架构
3.智能交互系统
近年来,随着仿人机器人技术的不断发展,要求机器人不仅能够被动的从环境中接受信息,而且还要具有一定的行为决策和主动改变环境的能力,这就对其智能性和交互的自然性提出了较高的要求。对于交互对象来说,在识别出该用户之后,能够根据用户的偏好、习惯、当前的意图以及以前的交互历史等信息,提供个性化和前摄性的服务,并尽可能少地显示要求用户输入的信息,以避免频繁的中断交互过程,使得交互更自然和流畅。这就要求系统能够充分利用上下文信息进行计算,用上下文感知技术来实现最优化和智能化的人机交互服务。上下文的参与能够极大地提高仿人机器人的主动性和智能性。
上下文感知是指系统自动地对上下文、上下文变化以及上下文历史信息进行感知和利用,智能判断用户行为及目的,并据此做出决策,从而自动地提供相应的响应或服务,人性化调整人与系统交互的方式和内容。上下文感知包含上下文获取、上下文转换和表达、上下文的使用、上下文的存储和管理等一系列过程。上下文感知系统可以实现一定程度的无干扰计算,即在用户和智能系统的交互过程中,利用获得的各种动态上下文信息,经过处理、抽象,可最大限度地自动执行用户任务和进行交互行为。这样可以减少用户对计算过程的干预和频繁的输入,用户只需关心自己感兴趣的信息就可以了。
上下文感知应用的一个关键要点就是上下文信息的处理和提供,而实现上下文的有效提供的一个重点是针对上下文信息的要求和不同领域的应用要求,研究上下文信息处理的过程,以及合理的、有效的信息提供框架支持。如今,有许多研究项目已经初步研究了这方面的问题。Dey提出的Context Tookit(CTK)采用基于组件的抽象开发技术来封装和抽象上下文信息的获取、表示和管理,用功能组件集合来表示上下文信息空间的实体对象及其相互关系。例如它把传感器抽象成组件,把人、地点或某个实体对象抽象成聚合器,它的组件结构图如图9-24所示。获得了上下文信息之后,智能系统可以自动地对上下文、上下文变化以及上下文历史进行感知和应用,并据此做出决策,从而自动提供相应的响应和服务,这一过程称为上下文感知计算。在人与仿人机器人的交互中,上下文感知计算的一个目的是获取和利用上下文信息,以提供适合特定的人、地点、时间等的服务。仿人机器人在准确识别上下文的基础上,需要根据不同的上下文自动采取行为,以一定的智能做出行为决策,使得人机交互过程显得自然、平滑和拟人化。基于上下文技术的智能交互系统,大大提高了感知系统的智能性和感知效率,是未来仿人机器人交互方式发展的主要方向。
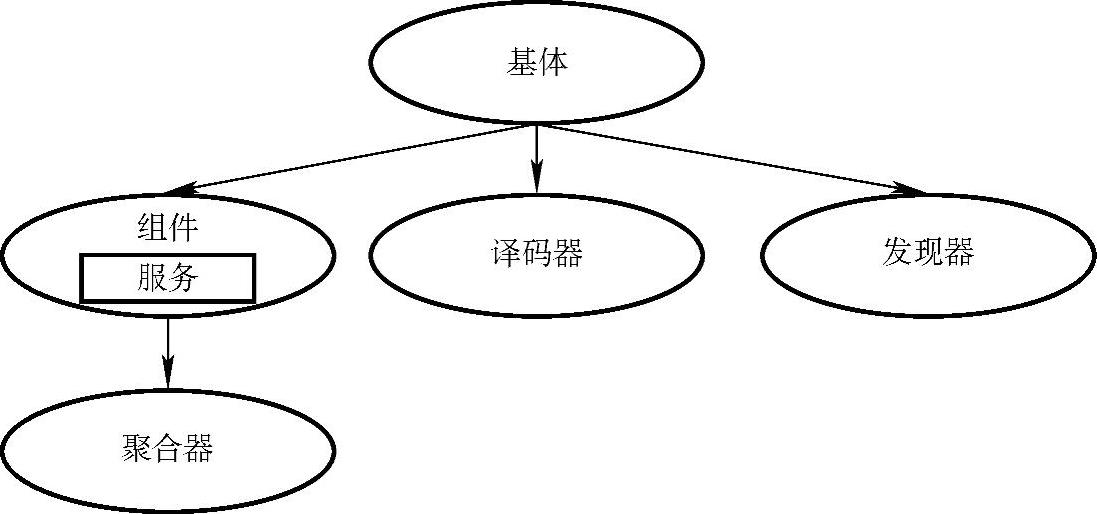
图9-24 CTK的组件结构图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。