



1.比赛规则
机器人世界杯赛中型组机器人的比赛规则决定了智能中型足球机器人要使用无线通信。在机器人世界杯赛中型组比赛中(见图8-25),有两个裁判在赛场上主持裁决工作,一个是场地上的主裁判,另一个是副裁判。主裁判的工作是根据规则判定每个机器人的行为是否犯规,以及发出开球、暂停、进球有效等指令。这些指令是以哨声和话语发出的,但是场上的机器人并不能直接了解他指令的意图,这就需要副裁判。副裁判的工作就是操作场边的一台裁判计算机,这台计算机和双方的服务器计算机相连,其上安装有裁判盒(Referee Box)程序,这个程序的作用就是向双方的服务计算机发送裁判指令(开始Stop、停止Start、边线球Throw in等)。
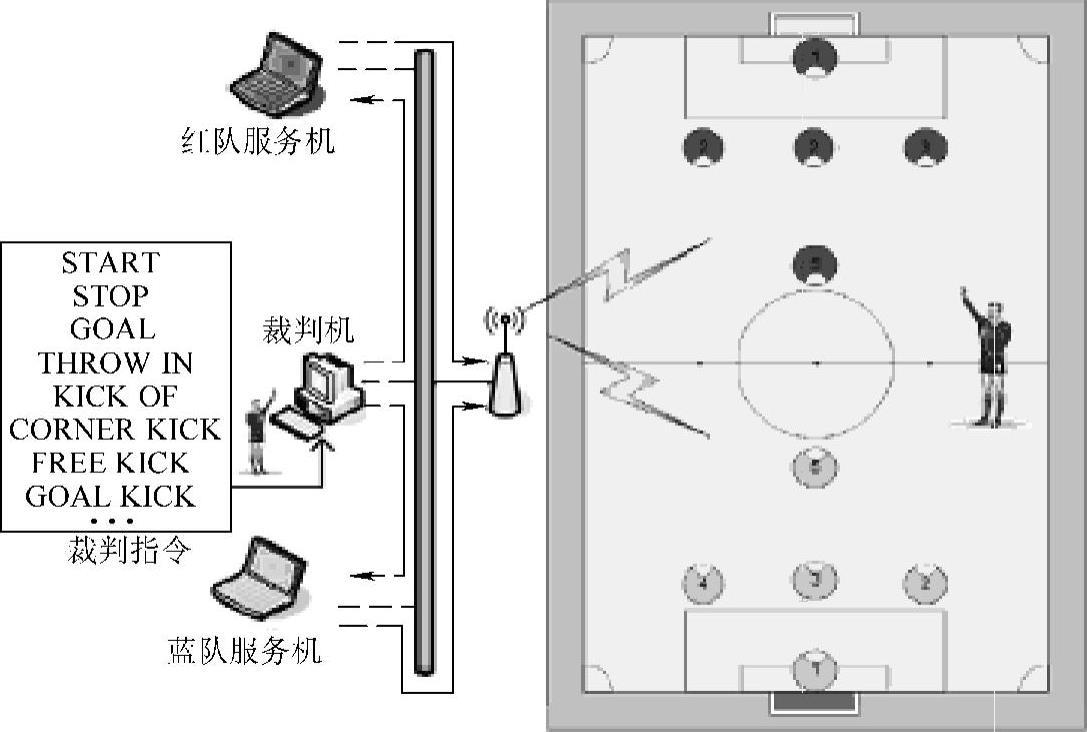
图8-25 机器人世界杯赛中型组比赛示意图
2.服务机程序与机器人程序
双方的服务计算机上通常运行一个服务机程序,这个程序主要有两个作用:一是将裁判盒发出的裁判指令实时可靠地发送给场上的机器人;二是实时监视场上机器人的状态,主要包括自定位的信息和识别球的信息。(https://www.xing528.com)
场地上的每个机器人之间也可以通信,这些通信不仅包括自定位信息和球位置信息,还包括球的识别率和球相对自己的一个相对位置信息。
这里要注意的一点是,服务机和机器人在网络拓扑结构上属于同一子网,服务机只是在比赛中起到看似“服务器”的功能,并不是网络意义上的服务器。服务机和机器人是通过一个路由器连接的,路由器和机器人计算机是通过无线网络IEEE 802.11b/g完成信息互联,采用无线连接;路由器和服务机是通过有线连接。事先需要给每台机器人分配一个IP地址,而且服务器的地址必须是固定不变的。
下面主要从智能中型足球机器人自身的角度,来介绍这两个通信子系统。
(1)机器人和服务机的通信 机器人在场上通过视觉等传感器能够做到自定位和球识别,但是在比赛时或者调试的时候并不能直接知道机器人是否定位成功或者识别到球,定位是否正确以及球识别是否准确。如果要时时去打开看机器人内部的计算机,势必会很麻烦以及很耗时,另外特别是针对视觉检测为基础的智能中型足球机器人,人为地接近会混乱其视野,造成某些颜色信息的丢失或者是干扰(如人穿着一件鲜红的衣服或遮挡部分场地白线),从而不可避免地测不准。因此,可以利用无线通信远程地检测这些信息。为了实现这一通信,机器人要实时地发送各种信息给服务机,但是并不一定每一帧都发送,这样会有不必要的数据通信量。因为发生的数据只是用来监视,不妨选择隔几帧(如5帧)发送一次。这种通信的协议通常是自定的。
(2)机器人之间的通信 机器人之间的通信和机器人与服务机之间的通信内容相似,但是意义不同。机器人之间的通信是为了实现信息共享,并且在这个信息共享的基础上实现一些基本的操作优先与协作。这种信息共享是实时的,即每一帧都要共享这些信息,是非常有意义的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。