



根据智能中型足球机器人的功能要求,虽然其外形各不相同,但其机械结构无非是由以下几部分组成:移动平台、踢球机构和带球机构。
1.移动平台
智能中型足球机器人要在足球场上完成找球、带球、射门等动作,而其基础就是智能中型足球机器人的自主移动。让智能中型足球机器人采取怎样的移动方式来完成这个任务呢?最有效的方法是采用多轮驱动。根据运动原理的不同,又可以分为差动运动和全向运动两种方式。
(1)差动运动方式 传统的轮式机器人就像汽车一样,一般采用差动运动方式,在平面这是一种非常完整的约束。差动运动轮系是由两个轴线平行的驱动轮以及一个或多个从动轮组成。通过控制两个驱动轮达到一定的速度,就可得到差动运动的效果(见图8-10)。
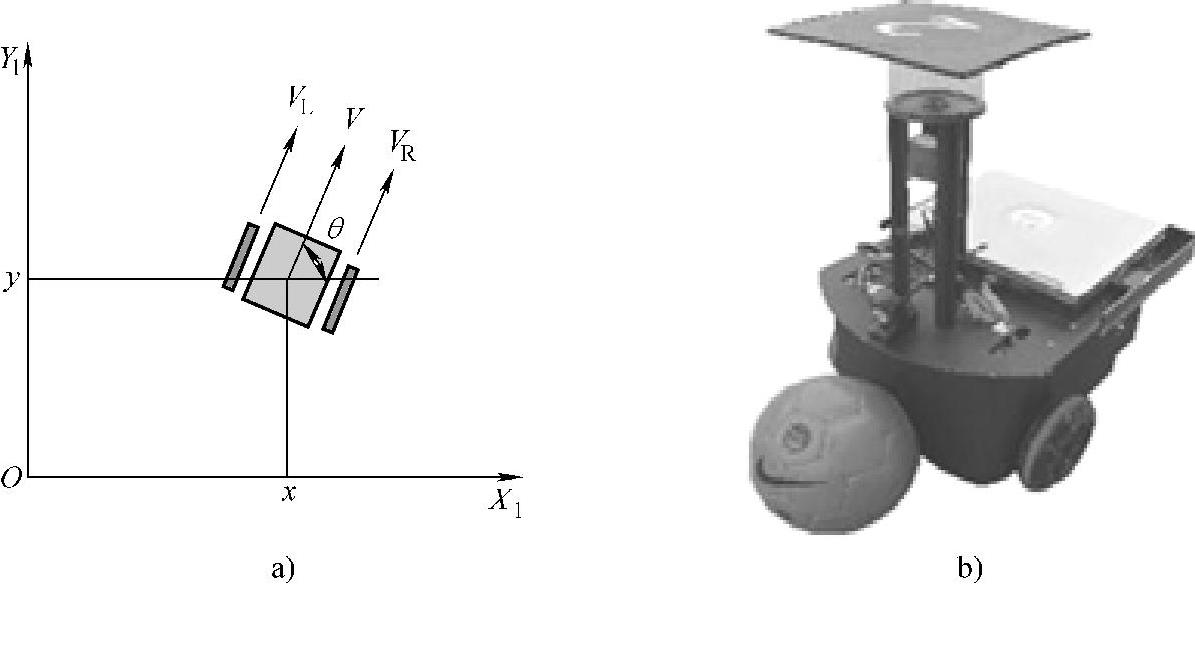
图8-10 差动方式与差动运动足球机器人
a)差动方式 b)差动运动足球机器人
例如当两个驱动轮具有相同的速度时,就能使得机器人进行直线运动。当一个驱动轮的速度为零、另一个驱动轮速度不为零时,机器人就会绕前一驱动轮与地面的接触点作旋转运动;当两驱动轮速度出现其他情况时,机器人的运动将会是以上两种运动的合成。
(2)全向移动方式 工业上有全方位的工业品传输系统和工厂全方位自动引导车,它们是全向运动方式。与传统的差动运动相比,这是一种比较先进的运动方式。这种运动方式被吸入智能中型足球机器人中,发展成了全向移动平台。三轮组合全向移动平台如图8-11所示。
全向运动方式是一种可以在平面内获得任意运动方向的运动方式,可以完全控制机器人在平面运动的三个自由度(两个水平运动分量和一个自身姿态旋转分量)。具有全向运动能力的运动系统使机器人可以直接向任意方向作直线运动,而不需要提前作旋转运动,并且这种轮系可以满足一边作直线运动一边旋转的要求,达到终状态所需要的任意姿态角。全向驱动平台可由三轮、四轮或五轮组成(见图8-12)。
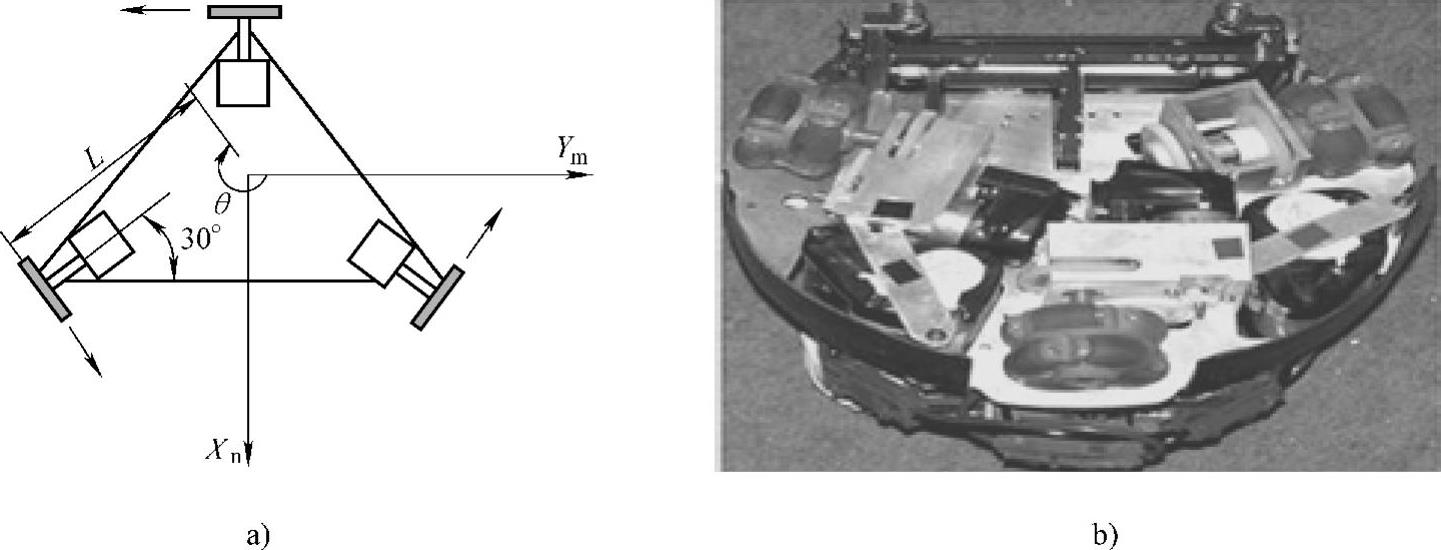
图8-11 三轮组合全向驱动平台
a)示意图 b)实物图
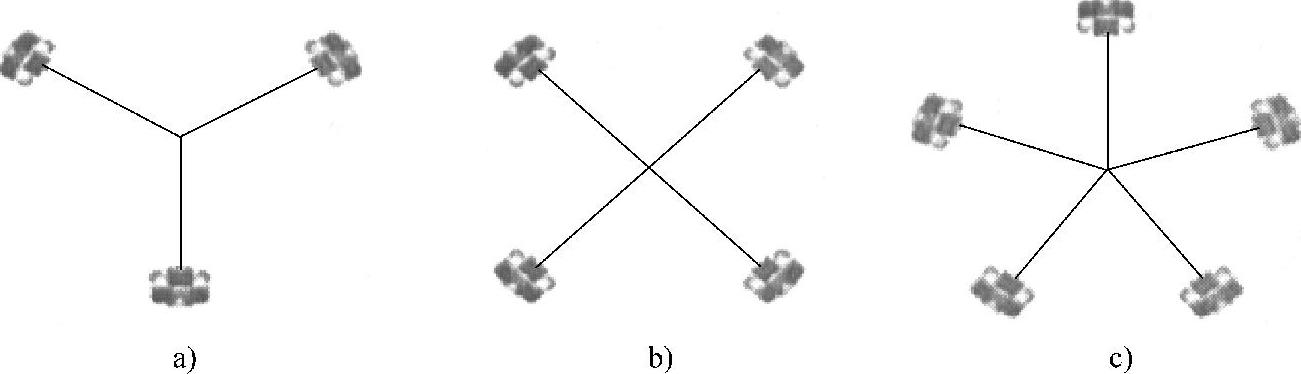
图8-12 三轮、四轮和五轮全向驱动
a)三轮全向驱动 b)四轮全向驱动 c)五轮全向驱动
(3)两种运动方式的比较 圆圈代表机器人的轮廓,从图8-13中可以看出,圆圈中心向外所引出的连线表示机器人当前的姿态正方向。考虑机器人完成由A点出发,运动到处于它侧向的B点,并且仍然恢复先前的姿态角的任务,对于差动机器人来说,机器人必须首先在原地顺时针旋转90°,然后才能向B点运动,到达B点之后,再原地逆时针旋转90°。机器人完成这样一系列动作之后,才能达到要求。而对于全向机器人来说,无论它现处何种状态,都可以直接向B点运动,在完成任务的任一时间段内都可以调整自己的姿态角。
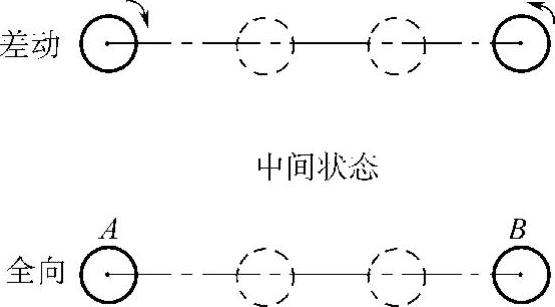
图8-13 差动方式与全向方式的运动比较
鉴于全向轮优异的动力学和运动学性能,如果将其应用于出现激烈对抗的机器人足球比赛中去,机器人将会更容易地跟踪预定的运动轨迹,在运动的过程中达到所要求的任一姿态。可以看出,足球机器人的运动方式从差动运动到全向运动的创新,极大地提高了机器人在诸如找球、带球、射门等状态中的灵活性和进攻性,使机器人在赛场上更具竞争力。目前,国内外强队的中型足球机器人普遍采用全向移动方式,只有极少数的中型足球机器人仍采用差动运动方式。
2.踢球机构
对于一个智能中型足球机器人而言,其移动平台的确非常重要。但是,如果没有好的踢球机构,机器人就好像一个强壮的运动员却缺一只脚,纵使力气再足,也只能一拐一拐地把一个球推进门框。由此可见,智能中型足球机器人的踢球机构是非常重要的。一个好的踢球机构,将使智能中型足球机器人的攻击力增加许多倍。因此,踢球机构的不断发展与创新是智能中型足球机器人发展的一个重要组成部分,踢球机构的创新设计非常重要。
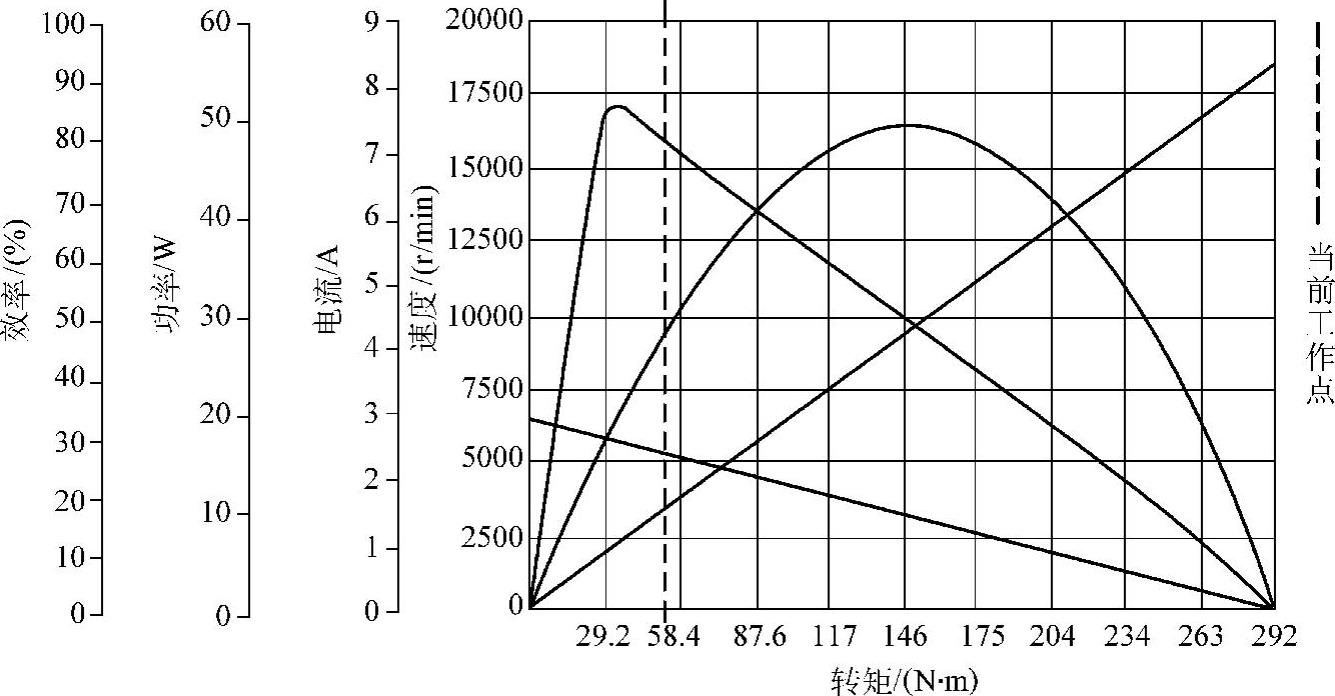
(1)电动机弹簧式 为了把足球踢进球门,人们最容易想到的就是利用弹簧先压缩然后释放,将球推进球门。实际使用时,电动机弹簧储能释放式踢球机构用电动机张紧弹簧来实现储能,要踢球时释放弹簧,带动踢球端面。这种机构大多数踢出的球力量很大,但速度难以控制,延时比较大,且电动机工作效率极低。电动机弹簧式踢球机构的实例如图8-14和图8-15所示,电动机工作状态如图8-16所示。

图8-14 荷兰某足球机器人队电动机弹簧式踢球机构
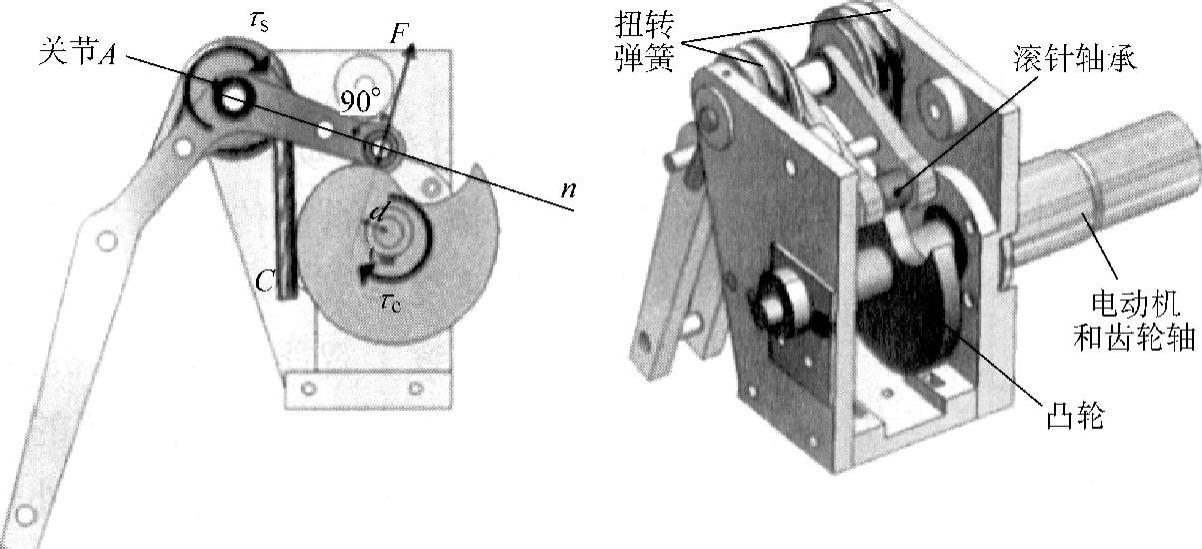
图8-15 日本某足球机器人队的电动机弹簧式踢球系统
(2)电磁铁式 电磁铁式踢球机构如图8-17所示,就是利用通电螺线管上加电,利用电磁感应原理产生磁力,推动踢杆将球踢出。其在控制踢球速度方面的灵活性高,但是如果设计和安装不合理,就容易导致螺线管内壁与磁性圆柱体踢杆之间存在很大的摩擦力,从而影响射门速度。通过计算机仿真优化电磁铁结构,可以使射出的球速达到12m/s。实际应用时,需要解决智能中型足球机器人内部的电磁干扰问题。现在,电磁铁式踢球机构的使用最为广泛。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-16 电动机弹簧式踢球机构的电动机工作状态
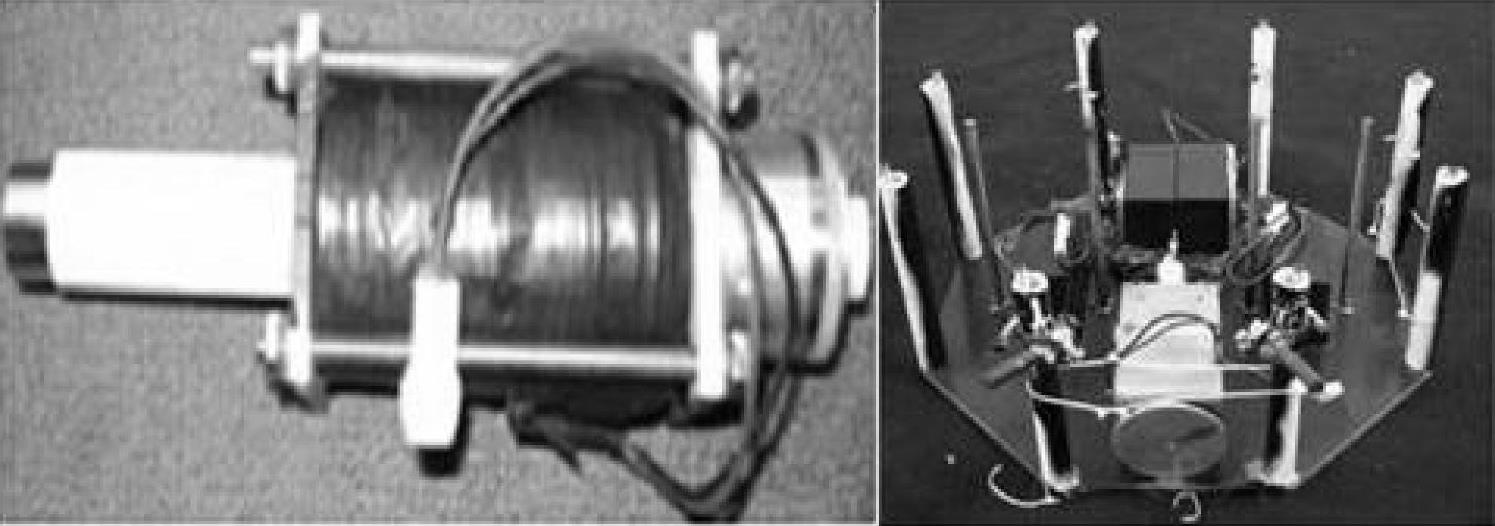
图8-17 电磁铁式踢球机构
(3)飞轮式 飞轮式踢球机构如图8-18所示,就是用电动机通过带传动,带动飞轮进行高速旋转,存储动能。在需要射门时,通过飞轮与踢杆之间的摩擦,把能量传递给足球,将球踢出。其理论上能提供给足球至少96J能量,能使足球踢出速度达到14m/s。
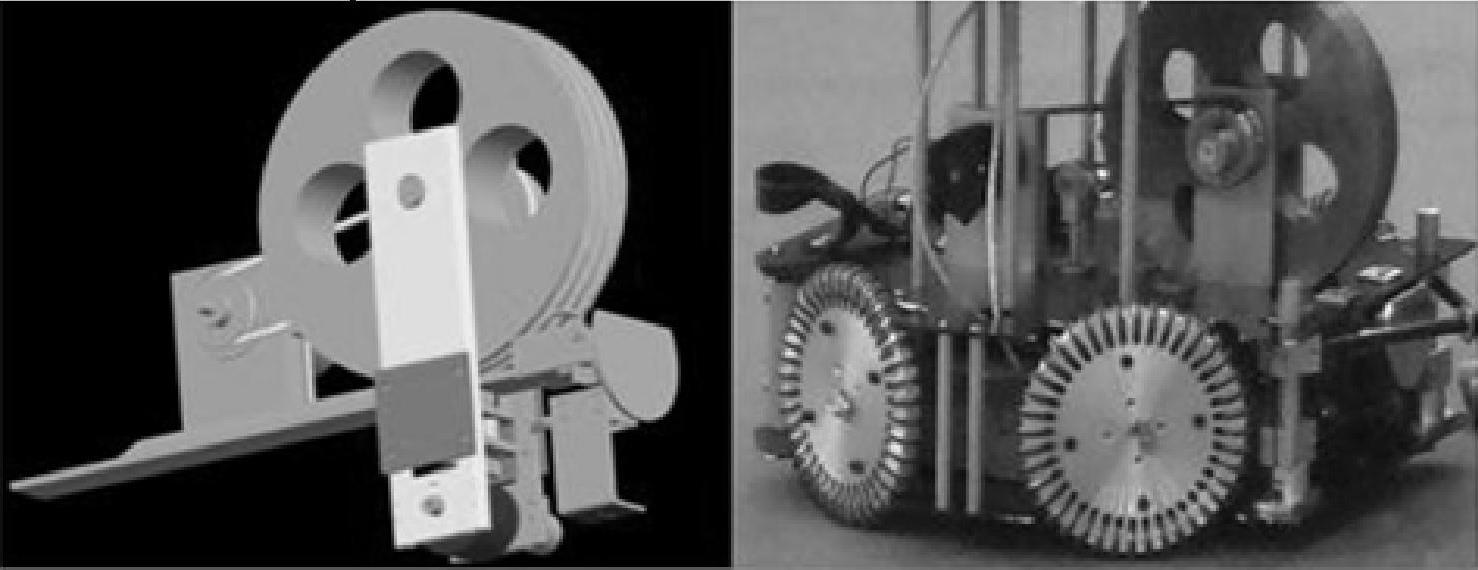
图8-18 飞轮式踢球机构
在实际使用中,可以发现由于飞轮的高速旋转,导致了智能中型足球机器人车身的连续振动。飞轮与踢杆之间的摩擦力相当大,导致了踢杆平均踢10次就损坏的结果,致使智能中型足球机器人可能无法顺利地完成一场比赛。故此种踢球机构在国内外使用极少。上海大学在2006年的中国机器人大赛中使用此种踢球机构,但之后便放弃了。
(4)汽缸式 汽缸式踢球机构如图8-19所示,是以汽缸为执行元件的气动踢球系统。通过阀控制向汽缸通气的时间或气压,来实现对汽缸中活塞运动速度的控制。其控制精度较好,能达到比赛的要求。虽然机器人需携带占一定空间、预先充气的储气罐,但在实际使用中,一个充到1.6MPa压力的1.5L储气罐的气压足够踢完一场比赛,并且1.5L储气罐的体积并不占很大空间。目前在国际上,应用汽缸式踢球机构的机器人以德国Brainstormers-Tri-bots和日本EIGEN为代表。在国内,上海大学在2007年首次使用了汽缸式踢球机构,之后上海交通大学在2008年也开始采用了这种机构。
可以看出,汽缸式踢球机构是一套比较合理的踢球机构,但在使用中存在耗气量与足球射程的矛盾,要将足球踢得远,选择汽缸口径就要相对大些,机器人携带的气就要多些。
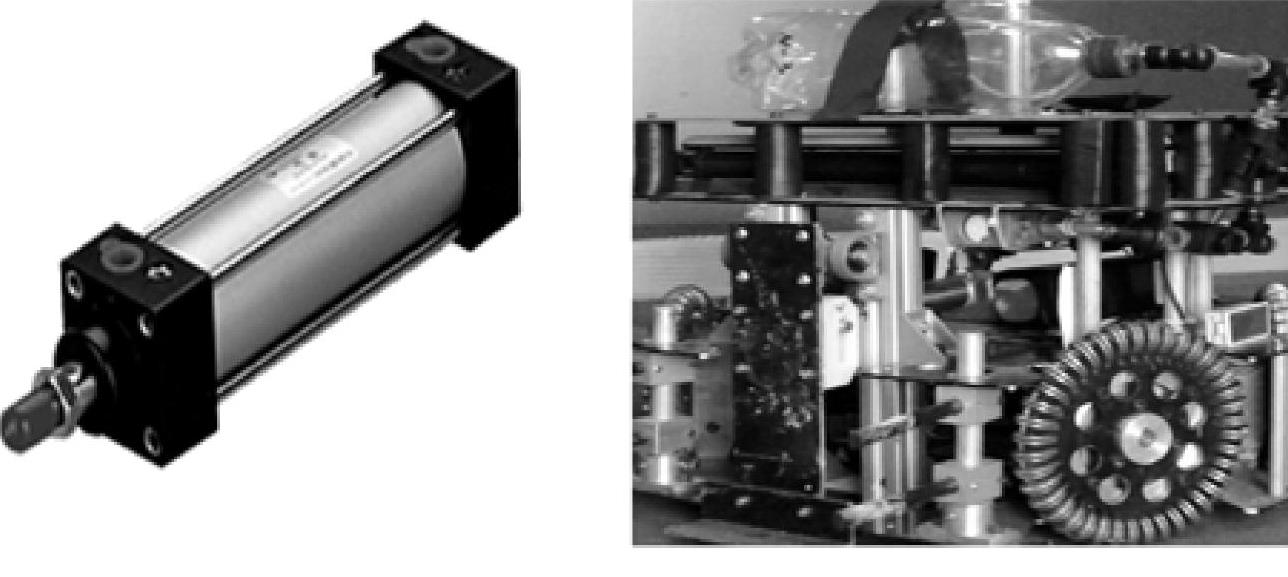
图8-19 汽缸式踢球机构
(5)气动肌腱式 气动肌腱是一种新型的拉伸型执行元件,是2000年由FESTO公司设计推出的新概念气动元件。它不是一根普通的橡胶管,而是一个能量转换装置,如同人类的肌肉那样能产生很强的收缩力。它以崭新的设计构思,突破了气动驱动器做功必须由气体介质(流体)推动活塞这一传统概念。
气动肌腱式踢球机构如图8-20所示,是以气动肌腱作为执行元件的气动踢球机构。气动肌腱与同直径的汽缸相比,能提供其10倍的力,且执行速度快、重量轻、耗气量少。通过电气比例阀调节气动系统的压力值,来实现踢球速度的控制。此种踢球机构比较新颖,但目前使用很少,值得进行深入研究和使用。
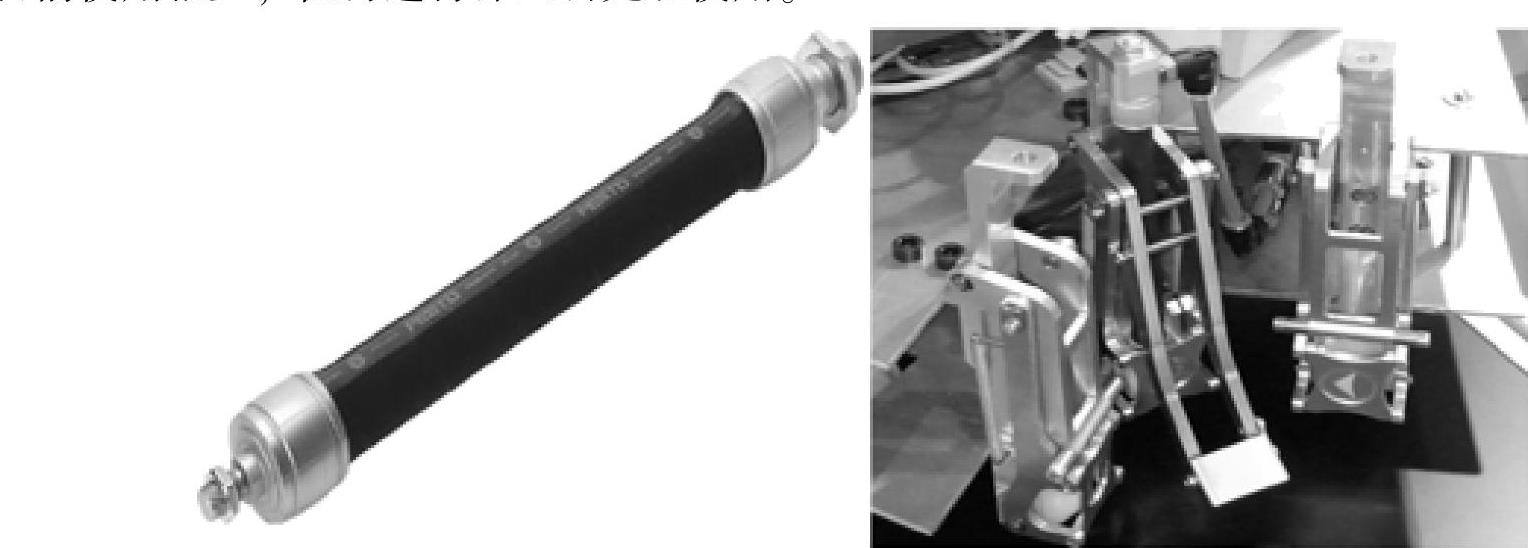
图8-20 气动肌腱式踢球机构
3.带球机构
智能中型足球机器人为了实现带球功能,就必须拥有带球机构。智能中型足球机器人拥有一个好的带球机构,就好比一名拥有出色盘带技术的足球运动员,可以带球长驱直入,攻击对方球门。目前,最普遍采用的是摩擦式被动带球机构,如图8-21所示。但由于此机构对球的控制是被动的,故带不住球、带丢球现象的出现概率比较大。

图8-21 摩擦式被动带球机构
除了被动带球机构,近几年还出现了主动带球机构。如图8-22所示为葡萄牙某足球机器人队的主动带球机构。该机构使用一个电动机带动一个小轮转动,靠小轮与足球之间的摩擦力带住足球,其电动机转速可以进行调节。
除了上述的主动带球机构外,还有另一种主动带球机构,如图8-23和图8-24所示。该类机构采用了两个电动机分别驱动两个小轮进行转动,靠两个小轮与足球之间的摩擦力带住足球。两个小轮的力可以不同,从而实现差动工作。相对于上一种主动带球机构,这种主动带球机构可以将足球带得更稳。目前在世界范围内,荷兰Tech United队的主动带球机构做得最为出色(见图8-23);在国内,国防科技大学的主动带球机构做得最有特色(见图8-24)。

图8-22 葡萄牙某足球机器 人队的主动带球机构
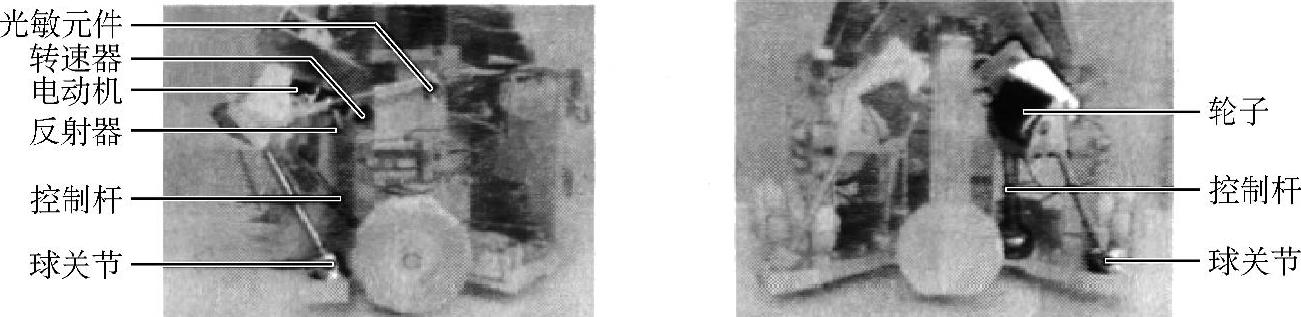
图8-23 荷兰Tech United队的主动带球装置
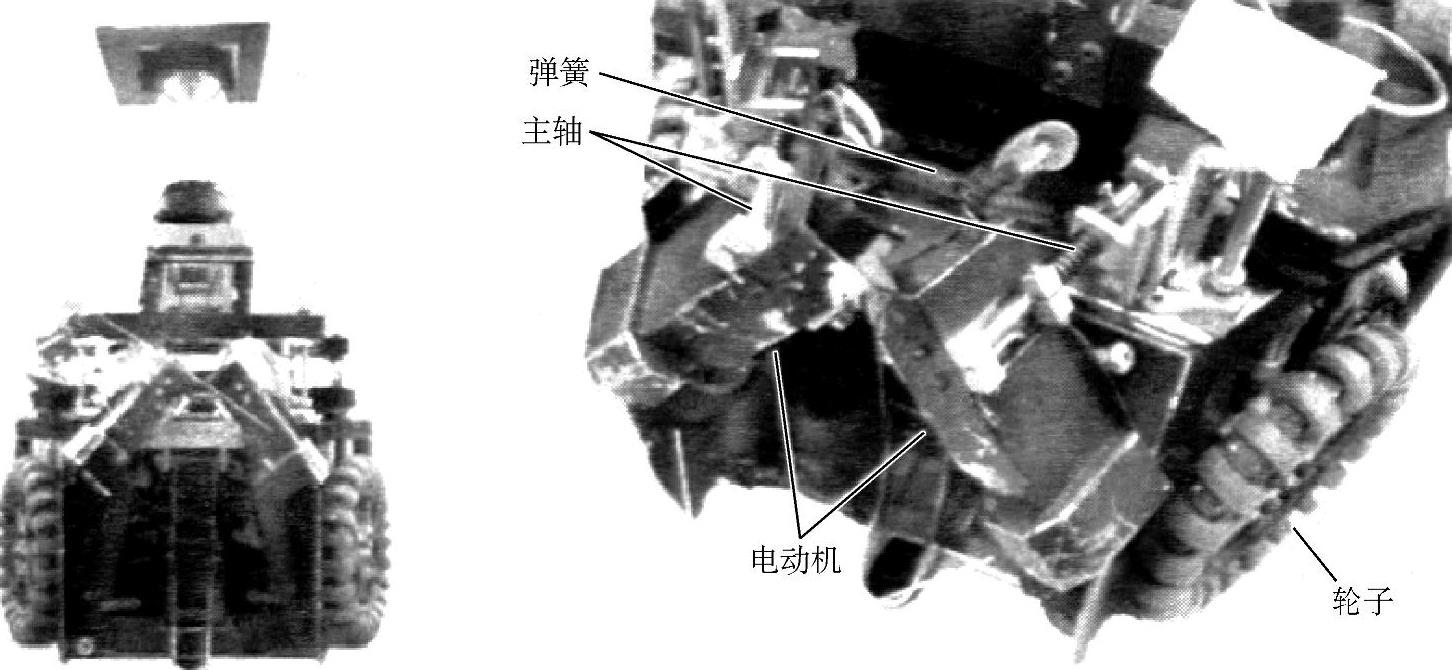
图8-24 国防科技大学研制的主动带球装置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。