



1.机械结构总体要求
智能小型足球机器人的机械结构由以下几部分组成:小型足球机器人底盘、行走结构、控球结构、击球结构、电源装置、外罩等机械结构,通信、CPU、控制电路板等电路结构,以及传感器、色标板等辅助结构。
底盘部分为直径≤175mm的圆盘,圆盘上均匀布置4个(可以为3个或2个)行走结构;轮子方向与边平行,前两侧电动机水平布置,后面的电动机高于前面的两个电动机,轮子采用全向轮(如果是二轮结构,则不能用全向轮);前端布置控球结构,前中部为击球结构,后面两侧安装电池盒,外罩安装在下半部位。
小型足球机器人外形可以选择圆形或多边形,主要作用是提供一个支撑的平台。这个平台要考虑很多,例如行走、转弯、控球、击球等机械结构,电池、控制、通信电路板以及外罩与小型足球机器人的装配位置关系等。机械结构的主要原则是以系统惯性最小作为系统总体指标,要求转动灵活,同时兼顾装拆方便、加工工艺、美观等。
1)智能小型足球机器人的最大形体尺寸为:高≤150mm,机器人能够放进直径为180mm的圆筒中。机器人最大直线运行速度大于2.5m/s,最小加速度大于2.5m/s2,轮子直径约为45~50mm。比赛场地铺毛毯,地面摩擦系数约为0.40~0.70。
2)小型足球机器人要求总体重量轻、重心低,尽量处在机器人对称轴线上,运动系统灵活、可靠,系统转动惯量小,连接部件牢固、防松,整体刚性好,具备良好的抗撞击能力。
3)小型足球机器人结构要考虑接插件连接方便,更换电池方便,运动中电池要防止松动或撞击其他部件,电源开关、系统设置开关应放在便于操作的位置。
4)小型足球机器人运动结构采用3个轮子按等边三角形布置,或4个轮子按间隔90°布置;驱动电动机的安装位置要高度对称,转动特性保持一致;作直线移动时,小型足球机器人要求能够达到高直线度轨迹运行。
5)击球结构:击球初速度不小于5.0m/s,击杆行程约为15mm。其中,击杆加速行程为5mm,击球行程为10mm;击球结构采用直流电动机驱动,由击杆和齿轮齿条传动组成;击杆回收时间小于1s;击杆具有导向、行程定位、缓冲和自锁结构;击杆前方安装击球板,增大击球面;击杆两侧留有测球传感器通光孔等。
6)控球结构:控球结构采用上、下两个对滚的圆柱辊子组成,辊子的外表面使用摩擦系数较大的海绵型材料制造,辊子与球表面的接触点在规则允许下力求吸力最大,辊子直径约15~16mm,转速可达3500~4000r/min,辊子线速度大于3.0m/s。电动机与辊子之间用圆形带传动或齿轮传动,最大球心直线速度不小于1.0m/s。
7)轮子结构:小型足球机器人的轮子结构有单排或双排轮结构的全向轮,由4个鼓形辊子组成。辊子绕自身轴线转动,或采用大轮套小轮的方式。
8)位置传感器位置:位置传感器为6~8个,前、后主运动方向各1个,两个运动前方各1个,安装高度距地面约60mm,保证接收到相关的信号;击球方向采用左、右各1~2个(中间位置被击杆占用),距地面高度约28mm;在击杆和辊子的缝隙之间,水平间距约30mm。
9)外罩部分:外罩用1~2mm厚度的铝合金弯制或采用ABS材料,上部采用聚氨酯材料制作,顶部平整,便于贴色标。机器人外廓全部为黑色,各项功能设计成模块结构,便于安装调试和维修。
10)机器人底盘:所有零部件全部安装在底盘上,底盘要求有足够的刚度和强度,同时重量尽可能轻,多余部分采用挖空设计。要注意螺钉联接的可靠性和定位面的设计加工精度。
11)电池盒:电池侧放在小型足球机器人的后半部的两侧,便于更换电池。
2.四轮结构的行走结构
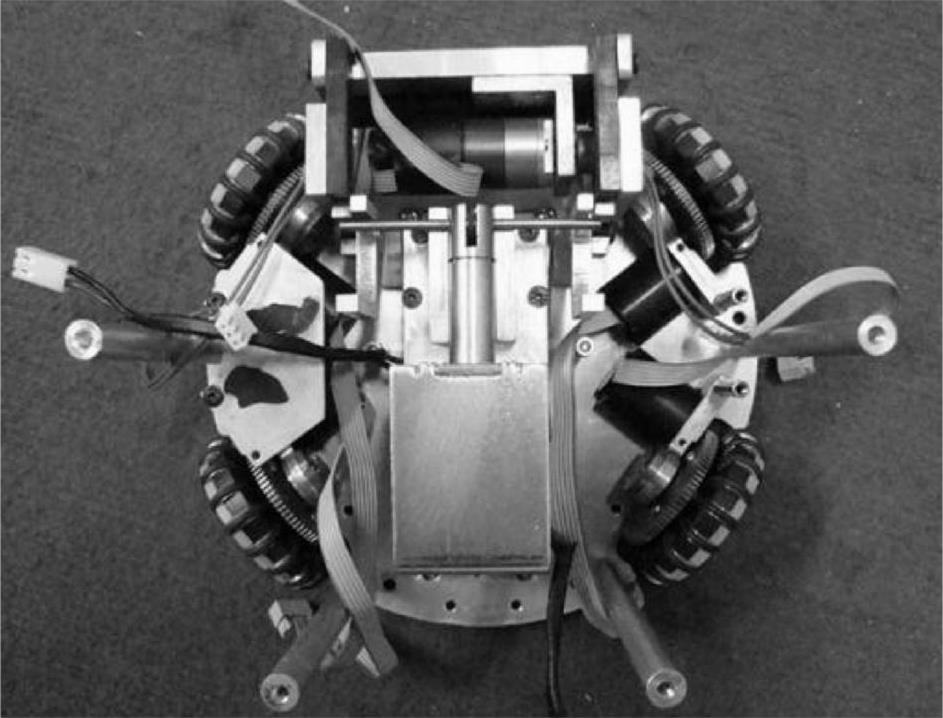
小型足球机器人左、右轮由对称的直流伺服电动机(含512线编码器)、减速结构和轮子组成。前方左、右两个电动机轴与轮子轴在同一水平面上,中心距为24mm;后方左、右两个电动机轴在轮子轴的上方位置,这样可以避免前、后电动机在空间上的位置干扰。采用全向轮子结构,是在圆形大轮的圆周上密布12个小滚动轮子,轮子可以沿周向和轴向两个方向滚动。采用这样的结构能使小型足球机器人转动更加灵活,但是软件控制会相对复杂一些。具体参数如下:
驱动电动机:Fualhuber2342/6V/12W/7000rpm/16mN·m;电动机效率:81%;最大外形尺寸:ϕ23×55mm;轮子直径:ϕ45mm;总重量:2.0kg;总效率η=60%;模数m=0.5;齿轮:Z1=20,Z2=32,α1=13mm,Z3=20,Z4=52,α2=18mm,α=24mm;总传动比:i=i1×i2=1.6×2.6=4.16;轮子转速:1683r/min;轮子线速度:v=3.96m/s。小型足球机器人最大直线移动速度:v=1.98~3.43m/s,电动机驱动转矩:39.94mN·m,轮子摩擦力:1.775N,摩擦系数:f=0.362,加速度:1.77~3.07m/s2。
四轮全向移动的机械结构如图8-1所示。
3.击球、控球及挑球结构
如图8-2所示为一种击球结构的示意图,也有的机器人采用如图8-3所示的击球或挑球结构。该类击球或挑球结构的特点是通过凸轮的旋转积蓄弹簧的弹力势能,再经过瞬时的释放,经由旋转杆的力的放大作用传递到球上,实现击球或挑球的功能。每当凸轮转动一个行程,顶杆从凸轮的最高点落回到凸轮的最低点,踢(挑)球杆撞击小球一次,可实现一次踢(挑)球的动作。该装置最大的优点是:可以根据电动机的功率来确定球被击发时的动能,并且在动力足够的情况下可以实现挑“高”球,越过对方机器人“人墙”直接进球。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-1 小型足球机器人的四轮全向移动的机械结构
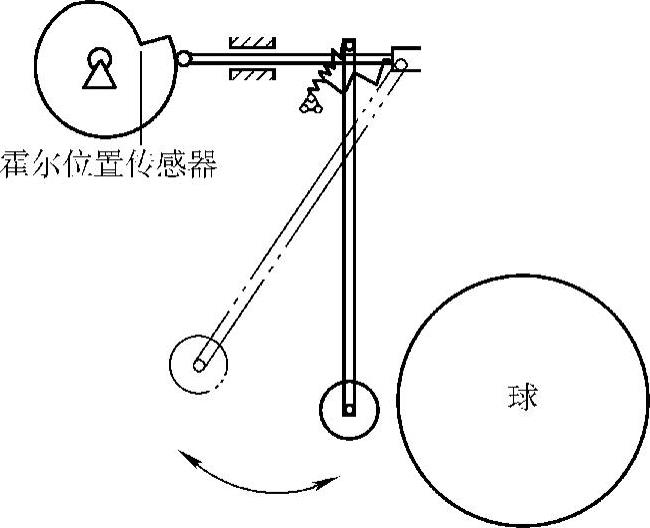
图8-2 击球(挑球)结构示意图
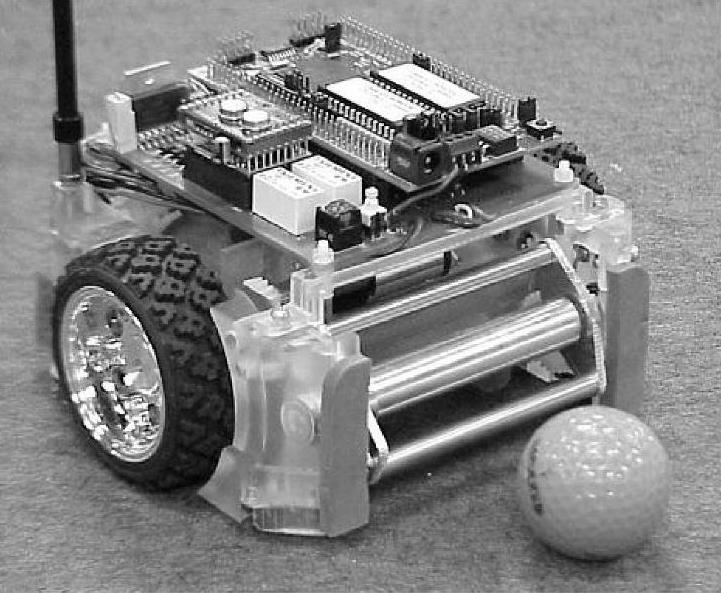
图8-3 装有击球(挑球)机构的机器人
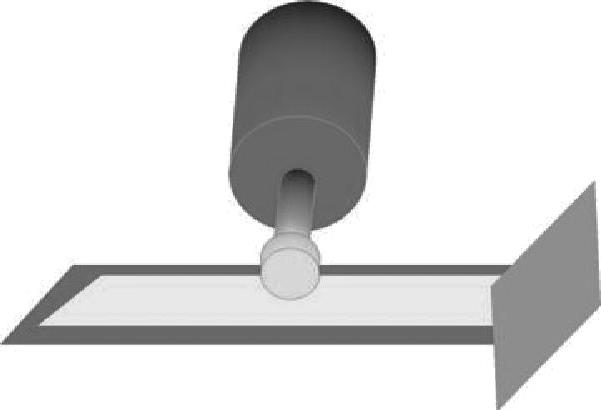
图8-4 直线运动击球结构
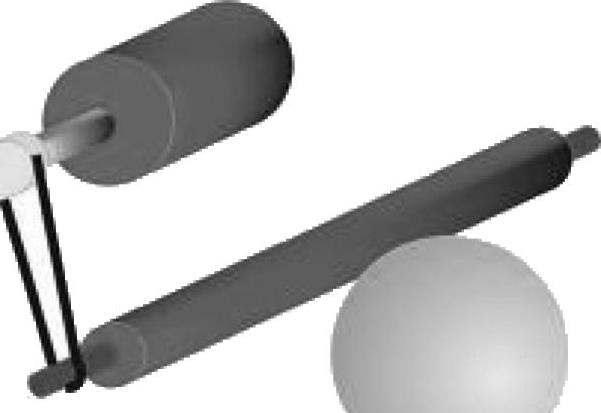
图8-5 小型足球机器人的控球装置示意图
击球结构常见的还有直线运动结构、电磁击球结构等。图8-4为直线运动的击球结构。电磁击球结构如图8-1所示,中间的一块为电磁铁,由电磁铁的瞬间运动带动击球杆向前运动产生击球效果。可以通过调节脉冲宽度实现击球力量的控制。
控球结构如图8-5所示,由传动带通过控球电动机带动摩擦棒转动,以使球能动态地被“吸住”,从而使踢(挑)球结构能正常有效地踢(挑)球,帮助球队传球、开球、配合、点球及射门等。其中,滚轮的材质需要有较大的摩擦力。此处不用齿轮而用传动带传动,是考虑到一旦发生摩擦棒与小球卡死,会影响到控球电动机的安全,而使用传动带就可以避免。
4.小型足球机器人各结构比较
以下参考参加机器人世界杯大赛的参赛队在各自设计小型足球机器人时提供的数据,得出二轮结构、三轮结构(单排轮)、四轮结构(单排轮)、三轮结构(双排轮)的比较。在最大正向移动速度为3m/s时,考虑到以电动机最大输出转矩为准,经过减速和效率转换后,电动机施加在轮子上的最大力矩被限定,此时轮子与地面之间的摩擦力为运行时的最大值,也是电动机可以传给机器人轮子的最大驱动力。三轮和四轮结构在求解正向和横向最大驱动力合力时不同。正向移动时,三轮结构只有前面两个电动机起驱动作用;而四轮结构的四个电动机全用于驱动,夹角都为30°,由于四轮结构的电动机功率为三轮结构的一半,所以正向总驱动功率相等(12.47W)。横向移动时,三轮结构的后面电动机全用上,总功率利用率为两个电动机(P+2Pcos60°=14.4W);四轮结构的四个电动机全用上,总功率利用率也为两个电动机(4Pcos60°=7.2W),所以三轮结构的横向加速度比四轮结构的大。综上所述,若四轮结构的电动机功率为三轮结构的一半,而三轮结构的总重量又可以比四轮结构的稍小,此时三轮结构比四轮结构好,三轮的正向加速度比四轮结构的稍大点,而横向加速度比四轮结构的大很多。
如果选用相同的电动机,正向移动时,四轮结构比三轮结构的加速度大;横向移动时,四轮结构比三轮结构的加速度稍小点。从控制角度出发,机器人速度控制要以最小加速度作为控制计算参数,即三轮结构用正向加速度(2.0)计算、四轮结构用横向加速度(2.0)计算,二者差别不大。
(1)速度 二轮至四轮结构小型足球机器人的最大速度指标相同,为3m/s,外形尺寸相同。根据国际强队的资料,比赛场地尺寸适合小型足球机器人运行速度在2~3m/s之间,其控制效果比较好,但此可控制速度为机器人所能达到的最大速度的75%,即机器人最大速度应为2.7~4.0m/s。随着比赛场地扩大,小型足球机器人之间的空当加大,速度需要提高。究竟提高多少合适,需要控制系统和图像系统的配合。
(2)加速度 小型足球机器人加速度,国际队伍指标为大于2m/s2,部分强队指标为5m/s2。加速度指标原则上越大越好,机器人应在0.6s内能够把速度从0提到最大值,行程小于1m。但加速度指标受地面摩擦系数和电动机驱动力矩与功率的影响,在保证速度指标的前提下,传动比基本固定(一般电动机转速为8000~10000r/min,效率为70%,总效率约为50%,传动比为4~5),力矩放大倍数有限。增大摩擦系数(暂不考虑如何实现,地面与轮子的摩擦系数不足0.4),地面摩擦阻力增大,可以提高加速度指标,但需要电动机功率相应增大。例如地面摩擦系数f=0.6时,三轮结构(单排轮)的加速度可达3.39m/s2,单电动机的功率需要13.38W;f=0.4时,四轮结构的加速度为3.40m/s2,单个电动机功率需要6.7W。两者效果相同,但三轮结构电动机功率是四轮结构的2倍。如果再提高加速度设计指标,就要增大摩擦系数,电动机的功率要求更大,电动机外形尺寸也加大,不易在有限空间内布置结构。由于小型足球机器人重量和轮子与地面的摩擦系数相对稳定(单个轮子加速度a=fg/n,n为轮子个数),增加轮子数量,不能增加小型足球机器人总加速度指标,相反单个轮子的加速度值减小。
三轮结构与四轮结构相比,四轮结构的电动机功率要求比三轮结构的小(实现相同的设计指标),电动机外形尺寸可以小点。由于采用四轮结构,在规定的空间内,四轮结构的电动机尺寸必须比三轮结构的小才能安装,关键是电动机长度受限制,三轮结构的电动机尺寸允许ϕ26×58mm,四轮结构的电动机尺寸允许ϕ26×45mm。在这样的电动机尺寸限制范围内,三轮结构的电动机可选到12~20W,而四轮结构的电动机可选功率不大于6W。实际中,四轮结构使用8W以上的电动机,三轮结构使用12W以上的电动机才比较符合设计要求。
(3)轮子结构 国际队伍绝大多数采用全向轮,有的使用双排轮,有的使用多辊子单排轮。双排轮轴向尺寸大,转动平稳,与地面接触点在轴向变化,导致回转半径变化,占用的电动机长度约11mm,小型足球机器人中间位置空间紧张,辊子与地面之间的摩擦系数提高不易;单排轮轴向尺寸较小,转动不平稳,回转半径稳定,给小型足球机器人中间位置留出空间(布置击球结构方便),辊子与地面之间摩擦系数可以提高。葡萄牙队的方案是把小辊子做成很密、很薄的金属片,金属片与地毯之间如同履带的效果,其摩擦力很大,若能够进一步提高电动机驱动功率,其加速度值就能有很大提高,但这种结构制造难度较大。即使使用小橡胶辊子,单排轮比双排轮的摩擦系数也要大,尺寸也合理些。
(4)控制部分 电动机数量增多,控制电路(主要是电动机大功率驱动部分)也有增加,总电动机功率没有明显增加。三轮结构中每个电动机的功率比四轮结构中的大,但是码盘数量增加、硬件增多、成本也高、CPU处理码盘信号能力不够(能够处理二路码盘信号)、计数器数量需要外扩、电路稳定性和可靠性有所下降、程序运行时间及硬件资源分配也复杂。目前,硬件、软件电路中采用了一些非正常手段处理通信、电动机控制和码盘信号处理等问题,经常出现CPU死机现象。
总之,四轮足球机器人由于4只轮子着地,运行比三轮要稳定,三轮足球机器人的后轮在拖动时有点摆动;四轮足球机器人的每个电动机功率比三轮足球机器人的小,如果有合适的电动机和尺寸,四轮结构在正向运行时加速度比三轮结构的大,起动更快。从满足小型足球机器人运动性能要求看,三轮结构和四轮结构没有差别,四轮结构所达到的性能,三轮结构同样可以达到,其控制原理相同;从电动机功率利用率看,三轮结构和四轮结构效果一样,都没有全部利用电动机的全能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。