



仿生机器蟹的外形和功能以三疣梭子为生物原型,共有8只步行足,每只步行足有3个驱动关节,共有24个驱动关节,由24台伺服电动机驱动,形成24个自由度。仿生机器蟹模拟海蟹的多种步态,能够实现灵活的前行、侧行、左右转弯、后退等14个动作。步行足配有16只力传感器,来感知外部环境,检测足尖落地和步行足是否碰到障碍物等信息,为步行足的路径规划提供信息。系统的硬件构架采用嵌入式结构,以ARM系统、DSP芯片作为仿生机器蟹的核心控制器,完成复杂运动的规划和协调任务的运算。该系统采用红外线遥感、力传感器、视觉传感器等,运用多传感器信息融合技术实时辨别外界环境,使机器蟹具有较高的智能性,能够实现在沙滩、平地、草地等环境中前进、后退、左右侧行及任意位置、任意角度、任意方向的转弯等。机器蟹利用红外线遥感控制,具有一定的越障能力和爬坡能力。
该机器蟹每套执行机构有3个自由度,即该机器蟹总共有24个自由度。这么多的自由度对机器蟹的机构设计、运动学分析、实时控制、动作协调、步态分析等提出了严峻的挑战,但同时也是当代机器人研究的一个重点。螃蟹模型是一种具有冗余自由度的复杂多环并联结构,其自由度大于6。在实际设计中,只需满足模型自由度数大于等于6,就可以实现对步行机器人的全方位姿态和运动控制。将螃蟹抽象模型进一步简化,以便于实际样机的分析设计和运动学模型的建立。
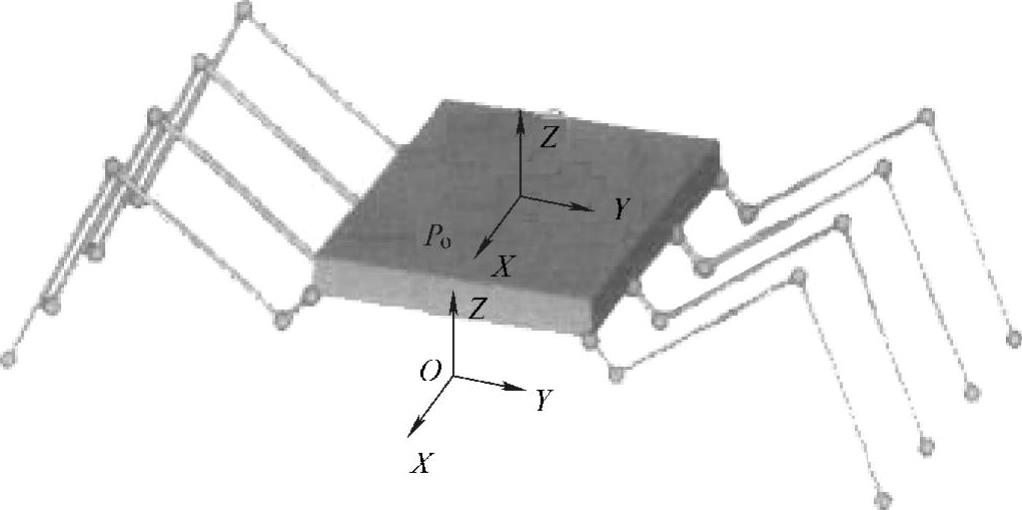
图7-7 仿生机器蟹步行足系结构模型
从总体结构上看,机器蟹存在一个躯体的中心构件和多个步行足的开链分支机构,每一条步行足参照螃蟹胸足的结构进行建模。步行足模型经简化后,成为类似3关节串联操作臂的RRRS型结构,从足根部与躯体连接处起计,包括3个转动关节和1个位于足尖的由3个正交转动关节坐标系组成的球关节,这样就得到了如图7-7所示的仿生机器蟹步行足系结构模型。该模型有8条步行足,每条步行足有3个轴线呈空间分布的转动关节。
考虑到机器蟹实际可能的结构,对该模型的描述作适当的简化和假设:各条步行足的结构及参数相同,且于躯体坐标系的平面对称分布,安装高度完全一致,而且初步假设躯体为扁平矩形结构。
三关节式步行足的结构如图7-8所示,每条步行足从躯体连接处开始,分为基节、腿节、胚节。设机体与各腿的连接点为Oi(i=1,2,…,8),坐标系为Oxyz,X轴过Oi垂直于机体平面且方向向上,Y轴同机体前进方向(考虑纵向爬行时为向前),Z轴由右手法则确定。
该多足机器蟹通过直流减速电动机和传动带轮,分别作为动力装置和传动装置来对足部进行驱动。每条腿由3个电动机和1个副传动带轮装置组成。整个机械传动装置如图7-9所示。
机械传动装置的驱动过程主要涉及以下方面:(https://www.xing528.com)
(1)驱动方式 根据对螃蟹的观察,其大臂根部关节具有水平、铅垂两个方向的自由度,因此在机器蟹主体板身上交错地放上两组减速电动机,分别控制机器蟹大臂两个方向的自由度。其中,舵机A、C控制足部在铅垂面内的运动,舵机B控制足部在水平面内的运动。
(2)传动方式 舵机A、C通过传动带轮的传动,同时控制足部的复合运动。D为与舵机固结的传动带轮,传动带固定在传动带轮的一侧,绕过下端的定滑轮。当A转动时,绷紧的传动带带动固定在它上面的挡板M一起转动,同时舵机B的右端突出部分N与M相接触(M压在N上)并随其一起运动;舵机B左端转轴固定在主体板身上,于是舵机B形成了绕轴P转动的杠杆机构,在铅垂面内运动。一方面,由于舵机传动轴作180°往复运动,通过计算可得足部在铅垂面内摆动幅度可达33°,符合越障要求;另一方面,舵机B的传动轴直接固定在足部,因此直接带动足部在水平面内运动。
膝部关节的运动较为简单,其驱动、传动同时由舵机C完成,且只有在水平面内的1个自由度。
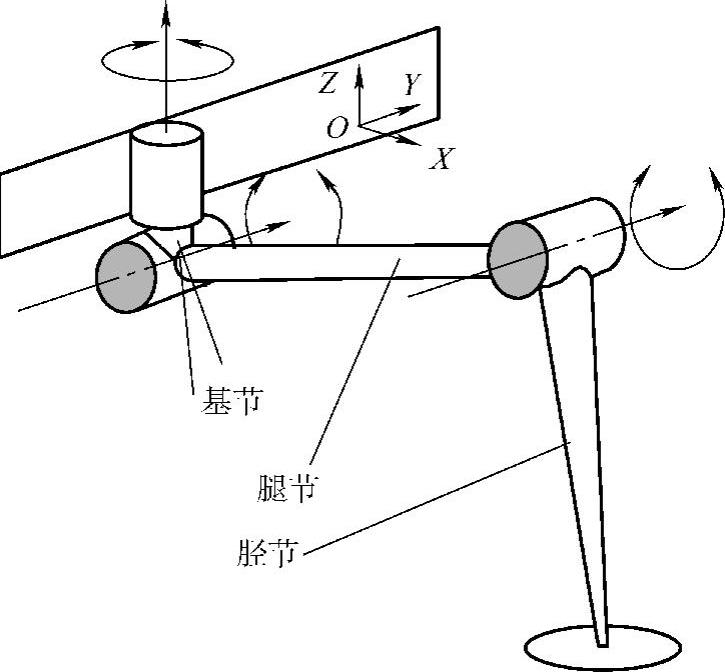
图7-8 三关节式步行足的结构简图

图7-9 机械传动装置示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。