



大田作物的植物保护作业包括喷药、施肥、中耕除草等,一般在作物不同的生长期进行。
1.喷药机器人
对于农田作物而言,有效地控制病害、虫害和杂草是获得高产、高品质农产品的重要保障,采取的措施包括生物方式、物理方式和化学方式。目前,化学喷药广泛用于大田的作物生产中,并且精确喷药和对靶喷药能最大限度地降低农药的使用量、保护操作者和保护生态环境。
日本开发的喷药机器人(见图6-56)已经商品化。该机器人能够自动沿路标和架设在地边的缆绳行走,轮子的外侧间距为320mm,可以通过较狭窄的通道。外置式的喷嘴能够将有压力的药液变成柱状并通过绕盘上的软管,由于绕盘与后轮轴连接,所以软管在机器人前进时从绕盘中抽出,在后退时又卷到绕盘上。
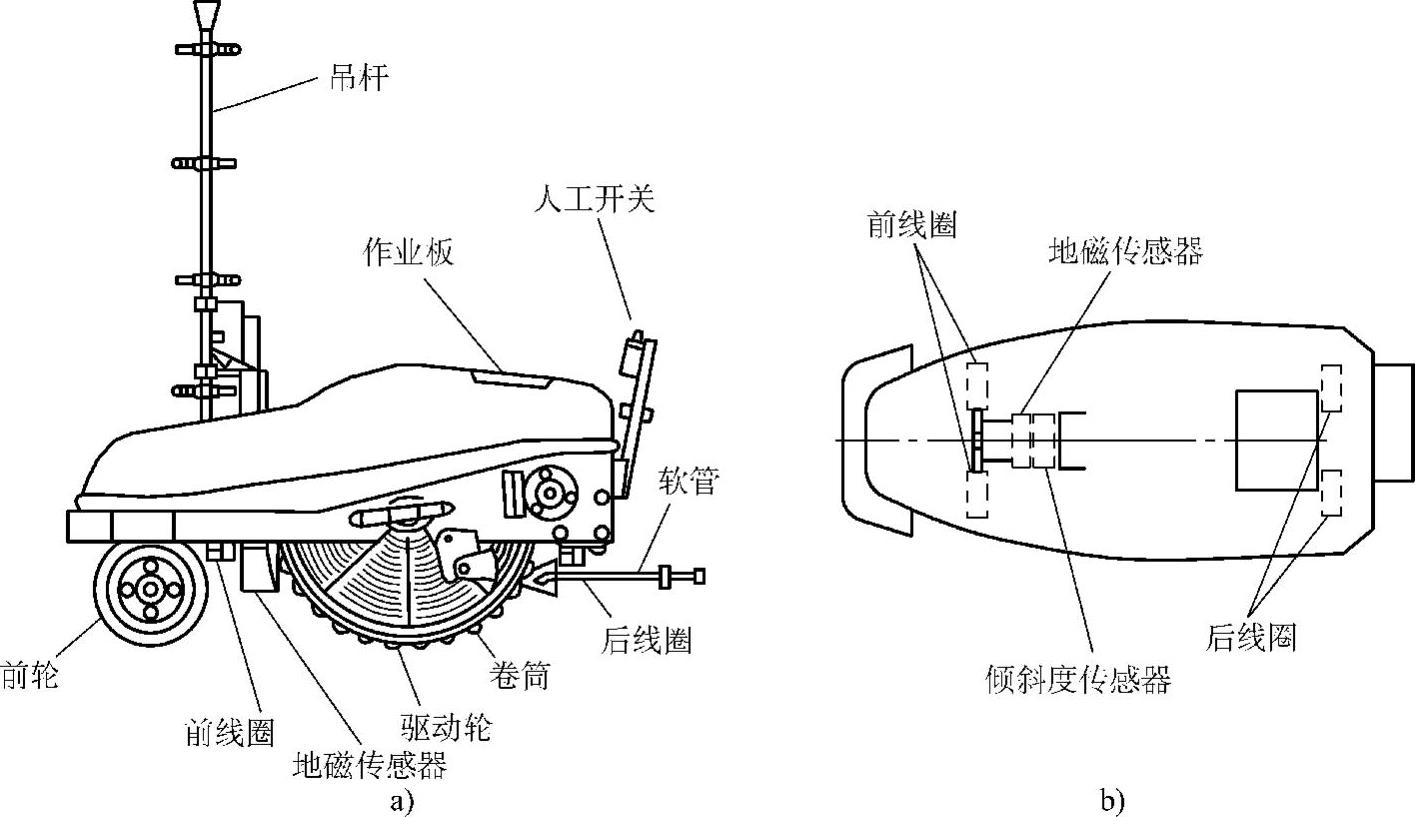
图6-56 喷药机器人
a)喷药机器人的结构 b)喷药机器人的原理图
机器人的前轮由电动机驱动,驱动轮由2个电动机以不同的速度分别驱动,分别用2个电瓶作为动力源,最小和最大速度分别为0.25m/s和0.5m/s。电缆上检测地磁的线圈通过每个线圈产生的感应电压的不同,驱动机器人沿电缆行走。此外,检测路标的地磁传感器可以引导机器人停止和转弯,同时也安装了倾斜度传感器。机器人可以选择3个自动作业模式(往返模式、转弯模式和自动模式)和人工操作。在往返模式中,当传感器检测到安装在通道两端的地磁盘时,机器人可以沿通道自动前进和后退,人工将机器人从一行移到相邻的一行;在转弯模式中,在完成一行的喷药作业后,机器人在地头移动到下一垄,当检测到地磁盘时,转入下一行进行作业;自动模式适合宽的通道和没有垄的长距离移动。
2.施肥机器人
大田作物的施肥机包括厩肥喷洒机、石灰撒布机、撒布机、尿液喷洒机和肥浆喷洒机。在水稻田的施肥作业中,人工在恶劣的地面和窄空间进行作业,非常艰苦,劳动强度大。
日本研制的施肥机器人(见图6-57)可以沿着水稻行自动行走,进行肥料深施,离地间隙为0.52mm,以汽油机为动力。
机器人有一个可以水平移动的转向支架和四轮驱动系统。每个轮子分别由不同的液压控制系统驱动,因此机器人不仅可以前进,还可以在小范围内侧向滑动。机器人安装了接触传感器和光传感器,光传感器由发射器和接收器组成,两个传感器可以检测作物行。用于支撑机器人机体的顶杆安装在转向支架的最前端,当轮子被提升后,可以支撑机体。
施肥装置包括1个泵、1个电动机和安装在支架前端的喷嘴。当机器人前进时,受压的肥料被注射到离地面15cm的地下。
机器人通过接触传感器可以沿作物行进行行走,并保证施肥的深度。液压控制系统通过仿形轮检测出对地高度,进而调整施肥装置的高度。松软水田中,由于车轮的打滑容易使单位面积的施肥量发生变化,所以通过仿形轮的转数检测出车辆的行走速度和距离,确保施肥量和施肥压力泵的转速。
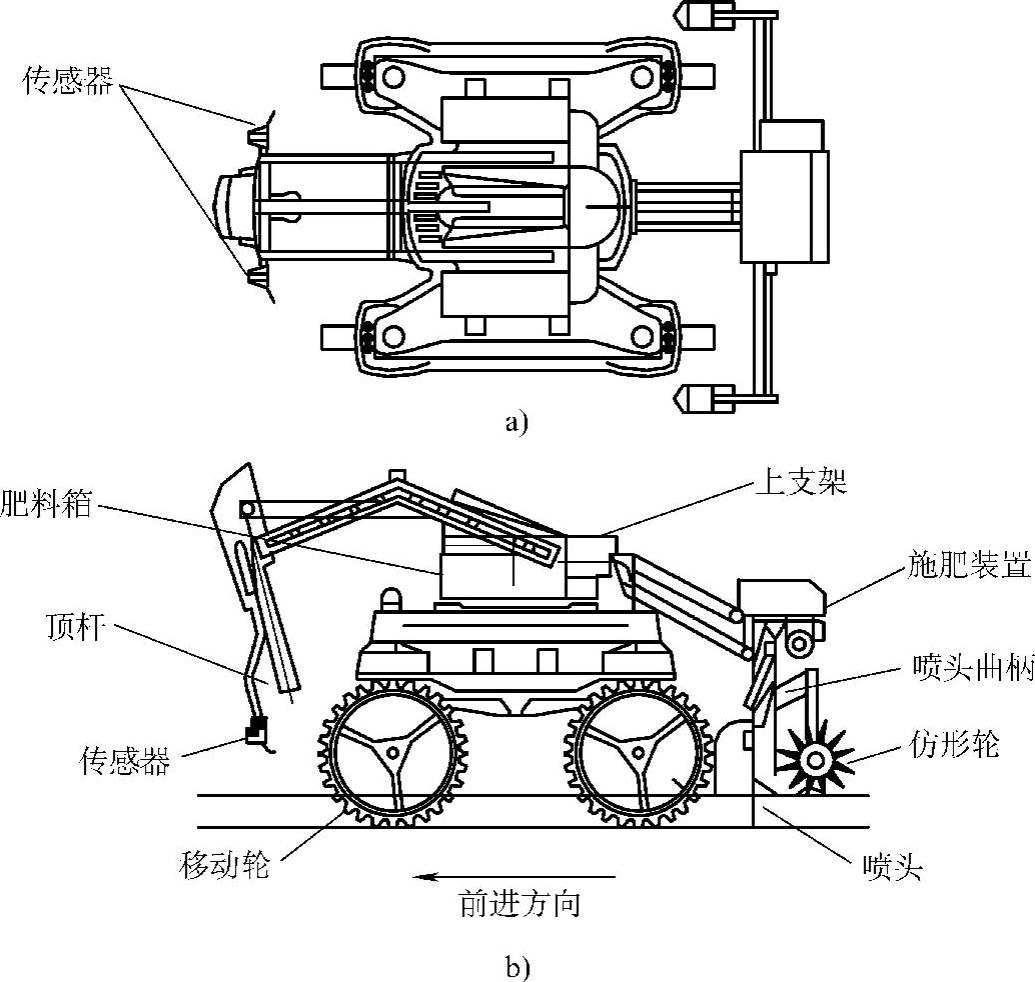
图6-57 施肥机器人
a)俯视图 b)主视图
通过机架前端的接触传感器和光传感器来检测地头。一般地,水稻的插秧行通常与田埂平行,但地头的秧苗与中央的秧苗垂直。因此在地头,由于行距比株距大,接触传感器与水稻行的接触周期就会增大。与此同时,当机器人行走时,发射器发射的光要穿过作物行才能到达反射器,发射的光被作物行中断,机器人就会在地头停止作业。
地头转弯时,通过液压机构将顶杆下降到地面(见图6-58),顶起车体前轮部分,使前轮转向90°;然后升起顶杆,同时将转向支架旋转180°,使顶杆转到车体的后方;再将顶杆触地,顶起车体后轮部分,使后轮转向90°。这样,各个车轮都处于横向状态,以此姿态可以横向移动。由于转向支架调换了前后位置,正好使机器人后退进行施肥作业。
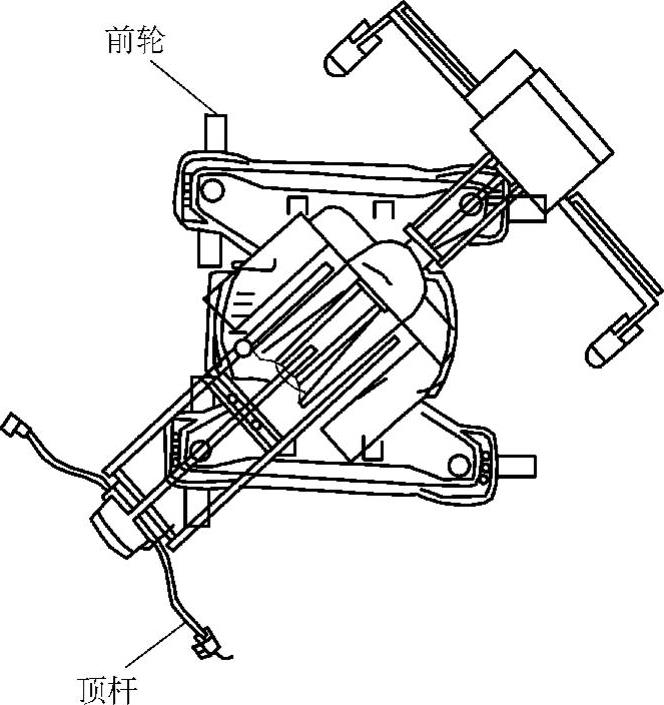
图6-58 正在旋转的机器人
3.除草机器人
目前,行间的杂草已经采用机械去除,但对于两株作物之间的杂草,还很难去除。除草的季节正好是作物生长的季节,如何从作物和土壤的背景中辨认出杂草是非常关键的问题。除草的方法有用化学除草剂的化学法、用机械的物理法以及用激光或火焰法。
(1)杂草的辨识 一些研究表明,土壤和绿色植物具有不同的分光反射特性,因此,研制出的传感器通过光源发射光线到地面,把反射光线分离成可见光线(V)和近红外光线(I)。根据反射率比,可以识别土壤和作物,还可以识别作物和小杂草(见图6-59)。
(2)火焰除草机 火焰除草法始于20世纪40年代的美国,到20世纪60年代,已经用于棉花、玉米、大豆、洋葱、葡萄、草莓等,火焰除草机也相继问世。(https://www.xing528.com)
韩国研制的火焰除草机(见图6-60)由燃烧器、燃烧角度控制、燃烧器支架、压力控制阀、气体控制杆、气罐等组成。燃烧器采用枪形(见图6-61),喷嘴直径1.0mm,可以喷射较热和较长的火焰,火焰温度最高能够超过840℃。
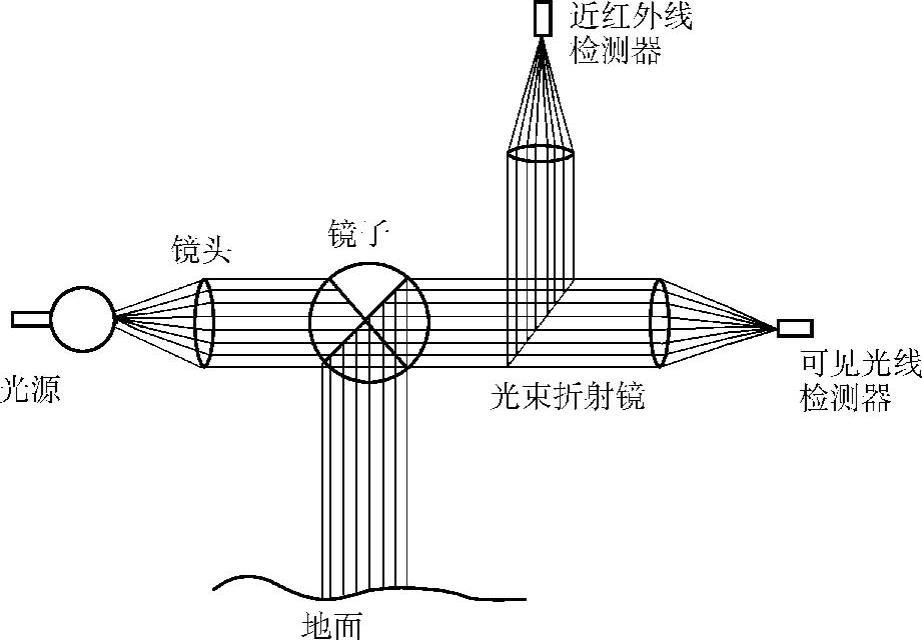
图6-59 红外线传感器的简图

图6-60 火焰除草机
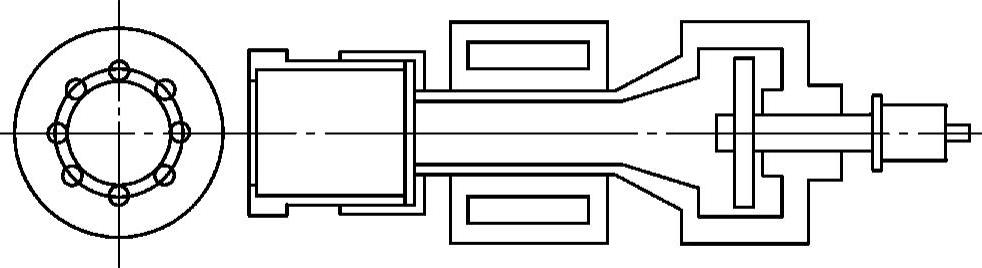
图6-61 枪形燃烧器
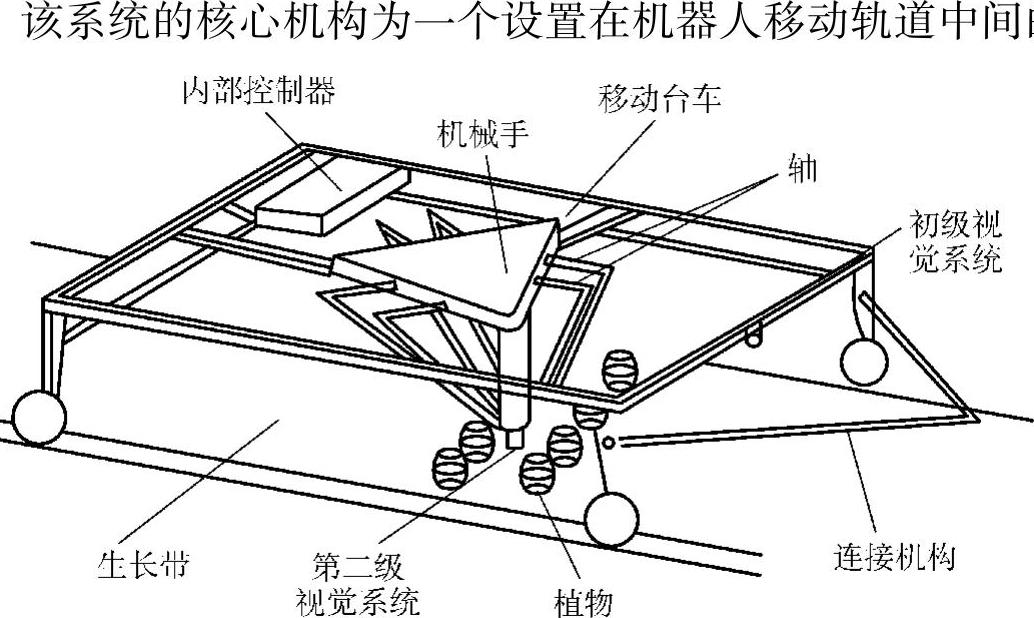
图6-62 除草机器人结构示意图
(3)基于机器视觉的除草机器人 基于机器视觉的除草机器人(见图6-62)由视觉系统、机械手、末端执行器和移动机构组成。除草机器人的视觉系统包括初级视觉系统和第二级视觉系统。初级视觉系统的功能是在行车移动的过程中,对杂草进行检测。彩色摄像机,摄像机在800ms内就可以拍摄一张照片,可以实现实时检测。该系统可以实现图像获取、图像处理和将图像传输到第二级视觉系统。
第二级视觉系统的功能是要确定杂草和提供杂草的准确位置,以便修正除草机构的位置。该系统安装在机械手上,包括内置精确处理单元的单色摄像机、能够对准初级视觉系统检测的一个杂草辨别机。根据整体控制的要求,第二级视觉系统要在土壤背景的条件下抓取杂草的图像,确定其位置,与初级视觉系统的数值进行比较,最终将杂草的精确位置传递给控制系统,驱动末端执行器进行除草。
区分杂草和作物的颜色空间选择RGB空间,如图6-63所示是获取的原始图像,经过图像分割获取到如图6-64所示的图像,由此可以获得面积、周长和杂草的中心点(见图6-65)。小于内置阈值的目标是噪声,可以消除;大于内置阈值的目标是作物,余下的是杂草,将其中心位置传送到控制系统和第二级视觉系统中。这些值的获取是在离线的情况下进行的。

图6-63 杂草和作物的原始照片
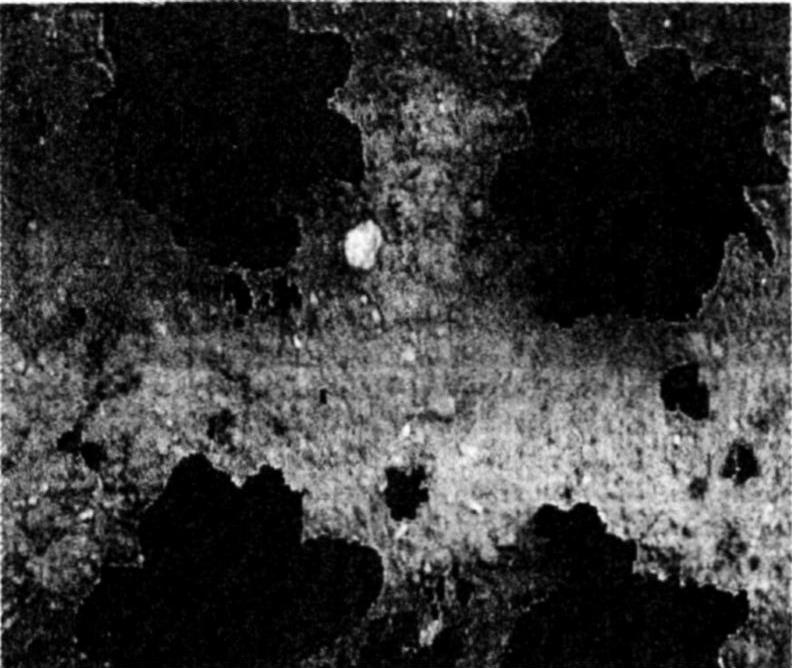
图6-64 杂草和作物的图像分割
控制系统移动机器人到初级视觉系统提供的杂草的初始位置,末端执行器距离杂草30cm。第二级视觉系统采用数字信号,重新获得杂草的准确位置(见图6-66)。
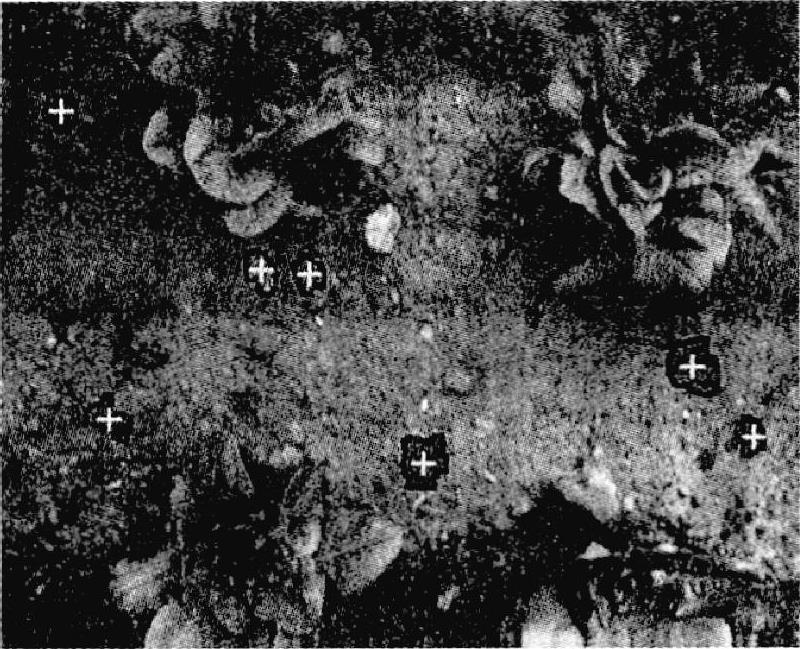
图6-65 杂草的确定结果
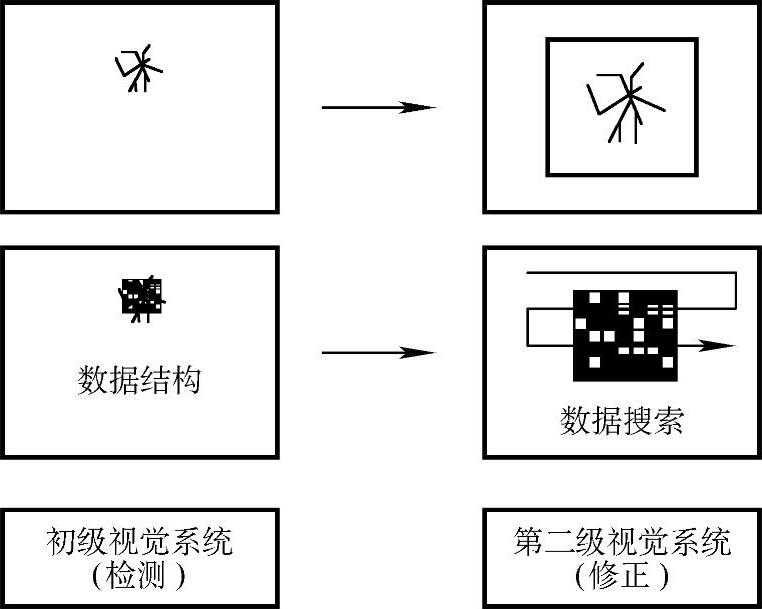
图6-66 第二级视觉系统提供的杂草数字信号
机器人的机械机构包括机械手和一个由拖拉机牵引的移动台车。机械手有一个固定在台车上的三角形铁板,每个边分别固定两根轴,共同驱动末端执行器的上、下运动。移动台车在拖拉机的牵引下,可以跟随移动,并采用多种传感器检测台车的运动,及时对目标进行修正。
其末端执行器类似蔬菜多功能除草机器人的末端执行器,在这里不再叙述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。