



对于相同对象或作业空间相近的作业,可以采用多功能机器人,只需更换不同的末端执行器、视觉系统和控制系统就可以完成作业。
1.葡萄多功能生产机器人
日本研制的葡萄多功能生产机器人,包括机械手、末端执行器、视觉传感器和移动机构,只要更换手爪就可以完成多种作业。
(1)葡萄蔬果末端执行器 为了使果串长得更大一些,提高果串的商品价格,有必要将果串中的劣果去掉。蔬果作业耗时长、劳动强度大、效率低,因此,日本研制了葡萄蔬果末端执行器(见图6-47)。
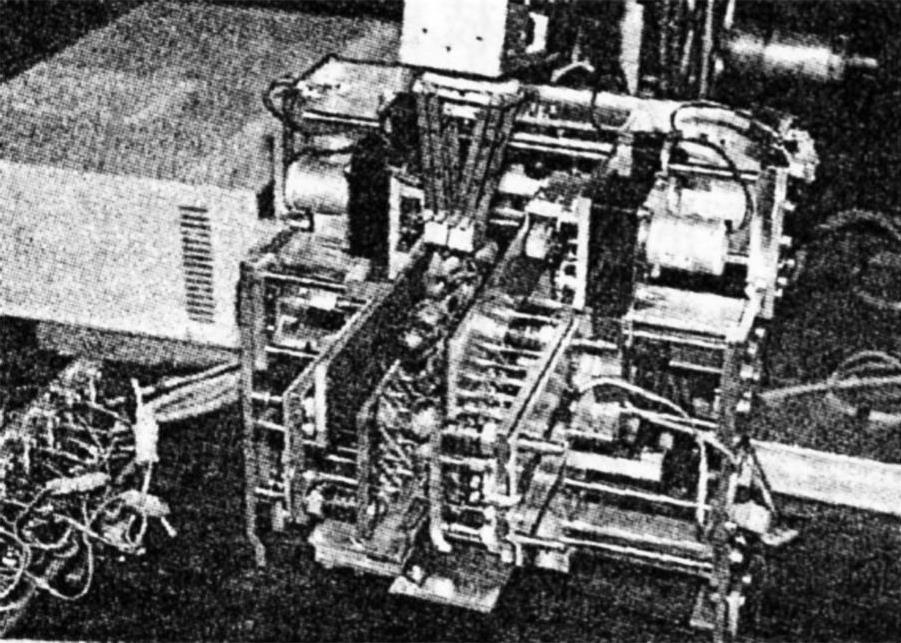
图6-47 葡萄蔬果末端执行器
葡萄蔬果末端执行器包括3个部分:上面部分分为两个带有橡胶的平行盘,盘子平行张开和闭合,交替前进和后退,在主干上压迫和扭掉果实;中间部分包括1个带有针的圆盘、弹簧和1个多孔盘,当中间部分抓住茎秆时,针从孔中穿出刺穿果实,随后果实干枯,自然落下;下面部分是切削机构,可切断果梗以规范果串的长度。
(2)套袋末端执行器 水果套袋(见图6-48)是近年发展的一项新技术,主要是为减少水果的农药污染、减少鸟害虫害、改善水果色泽和外观、达到减少水果的农药残留、提高水果等级、增加果农收入等目的。水果套袋作业通常是在果树定果期进行的,目前,果袋的生产已经实现了自动化,且规格多种多样,能够满足不同水果的要求。但是套袋作业仍依靠人工,每个工人每个工作日(8h)能套袋1000~1200个。果树的高度一般为3m左右,人工需要借助梯子进行作业,同时还要不断地移动作业位置,劳动强度和危险性非常大。

图6-48 水果套袋
日本研制的葡萄套袋末端执行器(见图6-49)采用电动机驱动,由1个可以上下移动将果袋逐个送给手指的果袋喂入器和2个可以平行张开的手指组成,与之配套的果袋上端有两个相向的弹簧。当果袋由果袋喂入器和手指携带时,弹簧处于拉紧状态,果袋张开;当果袋喂入器将果袋送给手指后,套袋末端执行器从下端接近目标果实,直到将一个果实倒进果袋后,手指松开,在弹簧的作用下将果袋固定在果梗上。

图6-49 葡萄套袋末端执行器
a)示意图 b)实物图
(3)喷洒机器人 人工喷洒化肥,不仅需要穿保护服以防受侵害,而且均匀性差、化肥的利用率低、污染环境、造成浪费,因此需要采用机器人喷洒。
喷洒机器人(见图6-50)由手爪、机械手、安装在机械手上的远红外线传感器、向喷嘴提供药液的泵和控制液体流动的电磁阀组成。控制系统控制机械手的移动,使其始终在葡萄架下运动。通过远红外线传感器的检测,使喷嘴和葡萄架保持一定的距离。

图6-50 喷洒机器人
2.蔬菜多功能机器人
多数蔬菜作业是具有选择性的,目前仍采用人工进行作业。日本开发了一个叶菜类多功能机器人(见图6-51),可以进行移栽、杂草控制和收获,适合于各种叶菜。多数叶菜类蔬菜生长在垄上,作业高度为0~35cm。
蔬菜多功能机器人由直角坐标系机械手、移动机构、末端执行器、传感系统和控制系统组成。末端执行器和传感器可以根据作业类型和蔬菜类型进行更换。整个系统由交流电动机控制。
叶菜多功能机器人的机械手固定在一个十字架上,并安装在四轮驱动的电车上;移动机构可以在两个垄沟内行走,前轮有连杆连接,可以保证它们有同样的转弯角度;导向装置安装在两个前轮上(见图6-52)。(https://www.xing528.com)
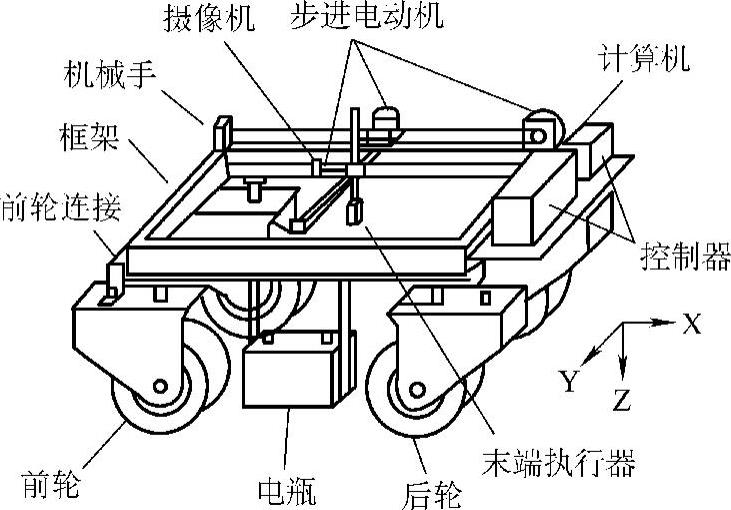
图6-51 蔬菜多功能机器人

图6-52 机器人在田间作业
直角坐标系机械手采用3自由度。由于机械手不需要太多的能量,可以采用步进电动机驱动,每个轴的平均速度分别为X轴为0.6m/s,Y轴为0.5m/s,Z轴为0.2m/s。
(1)移栽末端执行器 该机器人的移栽末端执行器适合于蔬菜的塞子苗,如甘蓝、生菜等。
移栽末端执行器(见图6-53)包括两个移栽手指、挖穴铲、直流电动机、电线圈和通过光缆与检测器连接的光电传感器。移栽手指通过电线圈的控制,可以在20mm的距离内开闭。秧苗推杆安装在手指上,在这些机构的前侧,安装了一个有直流电动机驱动的挖穴铲。当秧苗从穴盘中取出并去除土壤后,末端执行器随机械手向前移动40mm,打一个孔。
光电传感器安装在末端执行器上,控制挖穴铲的深度。一个光纤传感器用于检测秧苗是否存在,若穴盘中目标位置没有秧苗,传感器关闭,末端执行器移向下一个位置;另一个光纤传感器用来检测末端执行器离垄面的距离,进而控制移栽深度。这些传感器的开与关由反射光的发光亮度来控制。
(2)除草末端执行器 依据杂草的类型设计末端执行器,用彩色摄像机获得彩色图像进行处理,并得到杂草的三维位置。除草末端执行器(见图6-54)是用直径为4cm的螺旋形切刀切除杂草,作业深度20~30mm,足以挖取草根。
摄像机的离地高度为460mm,视觉范围为325mm×244mm(X方向×Y方向),可以获得杂草的图像,通过进行二值化处理得到G值。但是由于杂草与作物的颜色相同,很难用彩色信息进行分辨。在有移栽作业的作物中,移栽前,杂草基本上被除草剂杀死;移栽后,杂草比作物小。基于这一点,可以采取下列方法进行辨别:
首先,相对于R和B值,获取较大的G值,也可以获得作物的二值化处理。如果二值化的值在水平或垂直方向小于8像素或大于80像素,就可以判断是干扰或是作物,其他就是杂草的信息。
也可以用立体摄像机获取杂草的三维位置,在原始图像的输入点处获得一个立体图像,在离原始图像水平方向50mm的位置再获得一个立体图像,这样就可以用同一个摄像机获得立体图像。
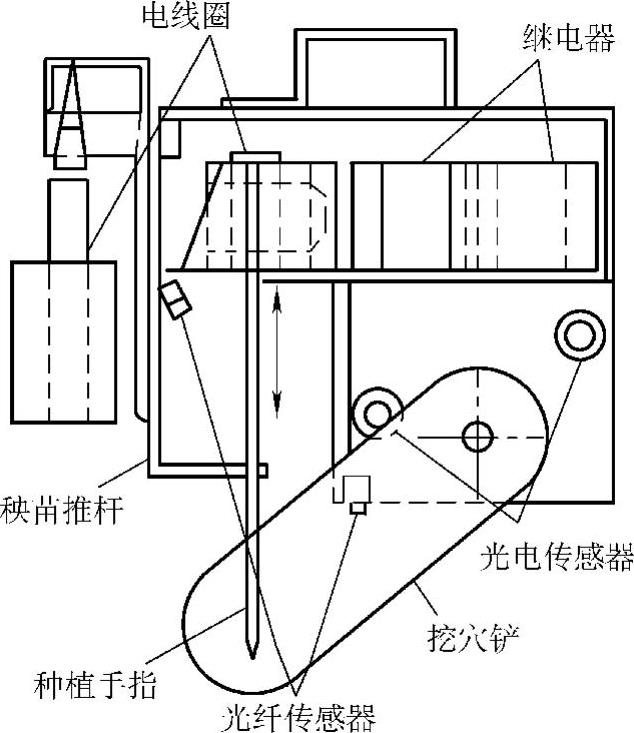
图6-53 移栽末端执行器
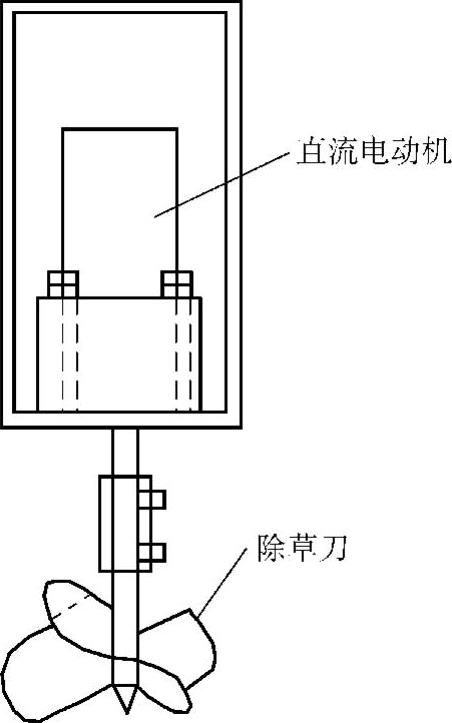
图6-54 除草末端执行器
在生菜地里进行杂草控制的实验,旋转切片的深度为20~30mm。采用人工和除草机器人进行对比:人工在移栽后,10天后就出现了杂草,并且每14天就要进行除草;而用机器人除草,杂草出现的概率大约是人工除草的6倍。
(3)收获末端执行器 叶菜包括大白菜等,种植密度高,收获困难,收获作业量占整个生长过程作业的60%。因此,需要研究省力的收获机械。

图6-55 叶菜收获末端执行器
叶菜收获末端执行器(见图6-55)包括收获部分和蔬菜把持部分,15W的直流电动机驱动4把收获刀和2个把持手指。这种机构适合在较软的地里作业。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。