



草莓作为高级营养水果,深受广大消费者的青睐。和其他水果、蔬菜一样,草莓在上市前也要经过严格的拣选和包装。由于草莓的价格受果实的形状、颜色、香味以及损伤程度的影响很大,因此草莓的收获和拣选在保证产地信誉、提高产品的价值上起着非常重要的作用。
1.栽培方式
传统的温室草莓栽培方式是将草莓种植在盖有地膜的垄上(见图6-36),为了便于收获,在草莓移栽的时候,将秧苗中带有花蒂的方向朝向垄沟,这样果实就露在垄沟方向。
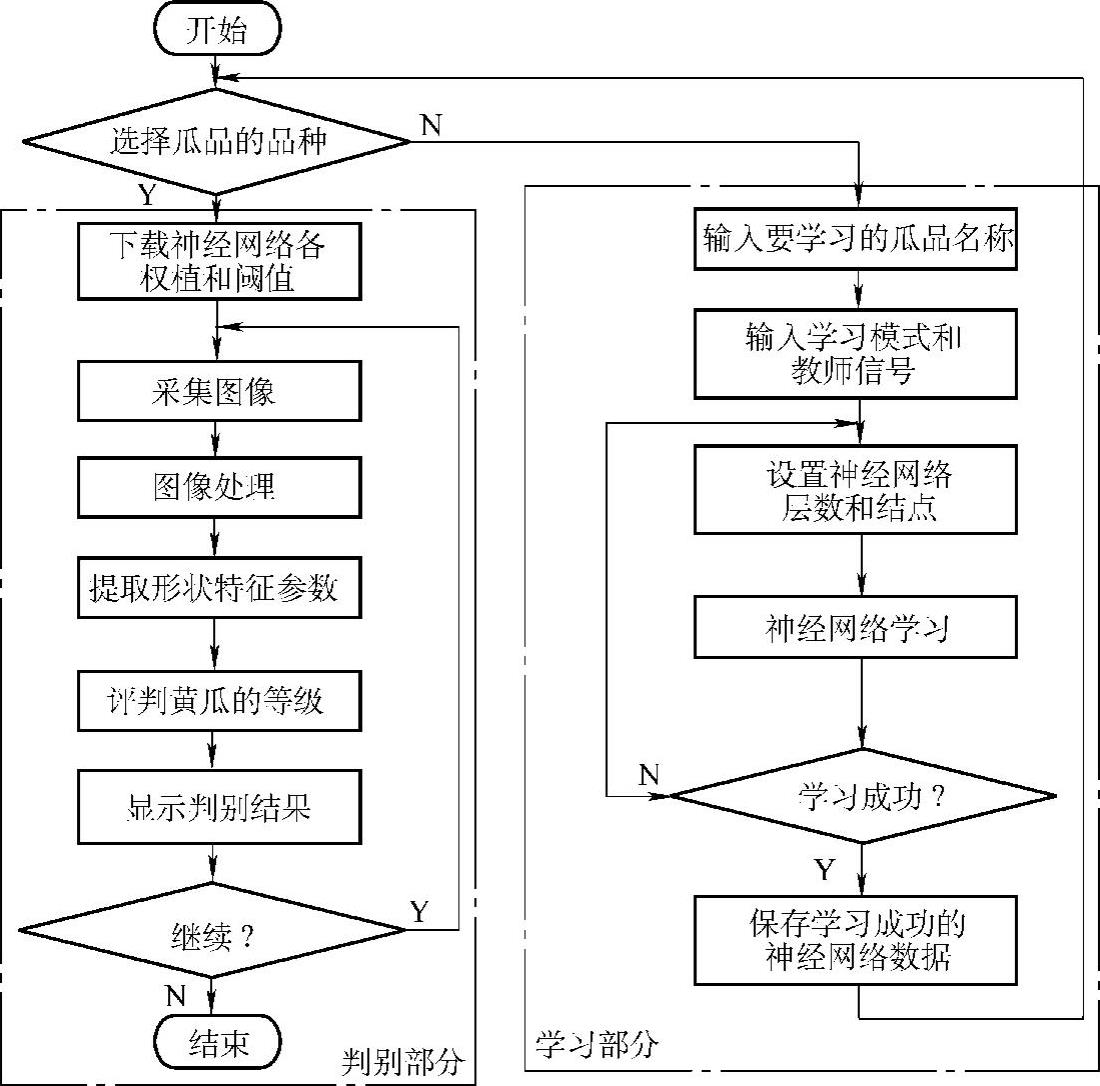
图6-35 长形瓜果等级判别程序框图
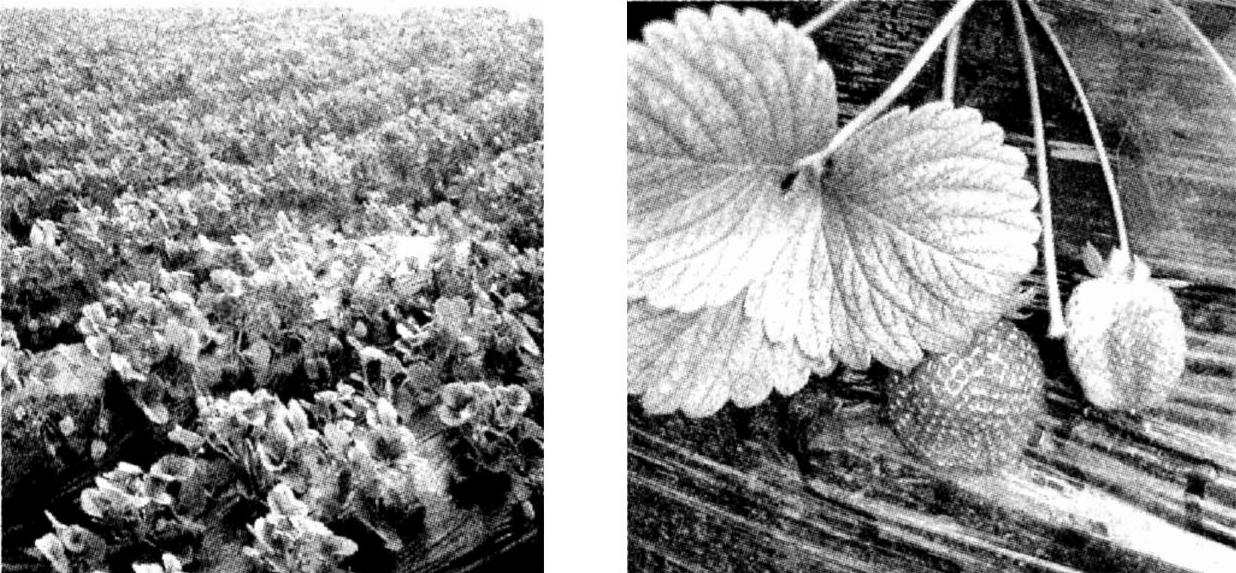
图6-36 传统的温室草莓栽培方式
草莓有其独特的生长方式,二歧聚伞花序使草莓按次序先后开花、结果,造成果实的不定期成熟,这就需要人工不定时的判断和收获。由于不同的人在判断草莓的成熟程度上存在差异,容易造成收获后草莓的等级差异很大。露地栽培的草莓,采摘期达20天左右,而温室种植的草莓采摘期可达5~6个月。而且人工收获时,每摘一处草莓需弯腰一次,劳动强度非常大。
2.露地生长草莓收获机器人
日本冈山大学研究出的龙门式草莓收获机器人,龙门架设在草莓生长区域的两侧(见图6-37),采用轮式机构移动。机械手设置在龙门架顶部,可以根据草莓的高度上下伸缩运动,末端执行器采用吸引式手爪,从草莓的上方确定二维坐标位置,进行采摘。
3.高架栽培草莓收获机器人
日本冈山大学为了研制草莓收获机器人,首先对草莓的栽培方式进行了改进,将草莓种植在高架上(见图6-38),果实垂下来。机器人在高架下有足够的活动空间,并且机器人的收获作业不受叶子的干扰。
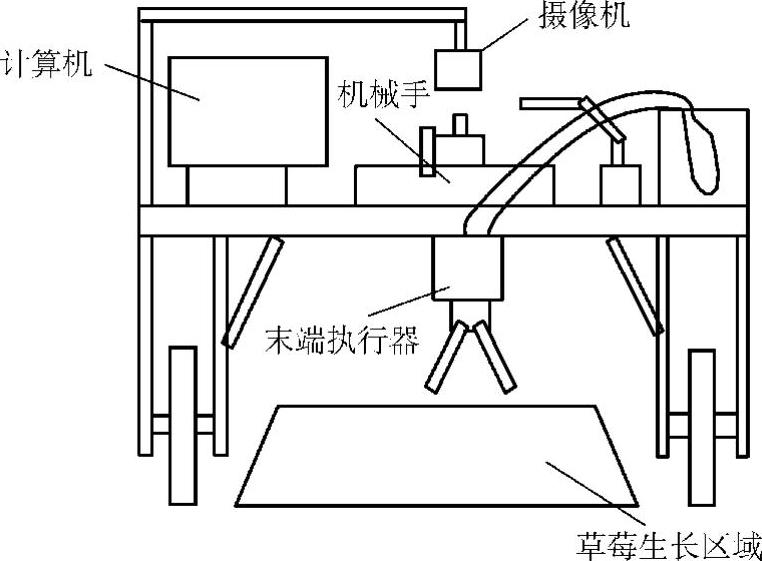
图6-37 露地生长草莓收获机器人

图6-38 草莓高架栽培
(1)机械手 高架栽培的草莓因障碍少,采用5自由度极坐标机械手(见图6-39),用彩色摄像机识别成熟果实,视觉传感器采用与樱桃番茄相同的算法。
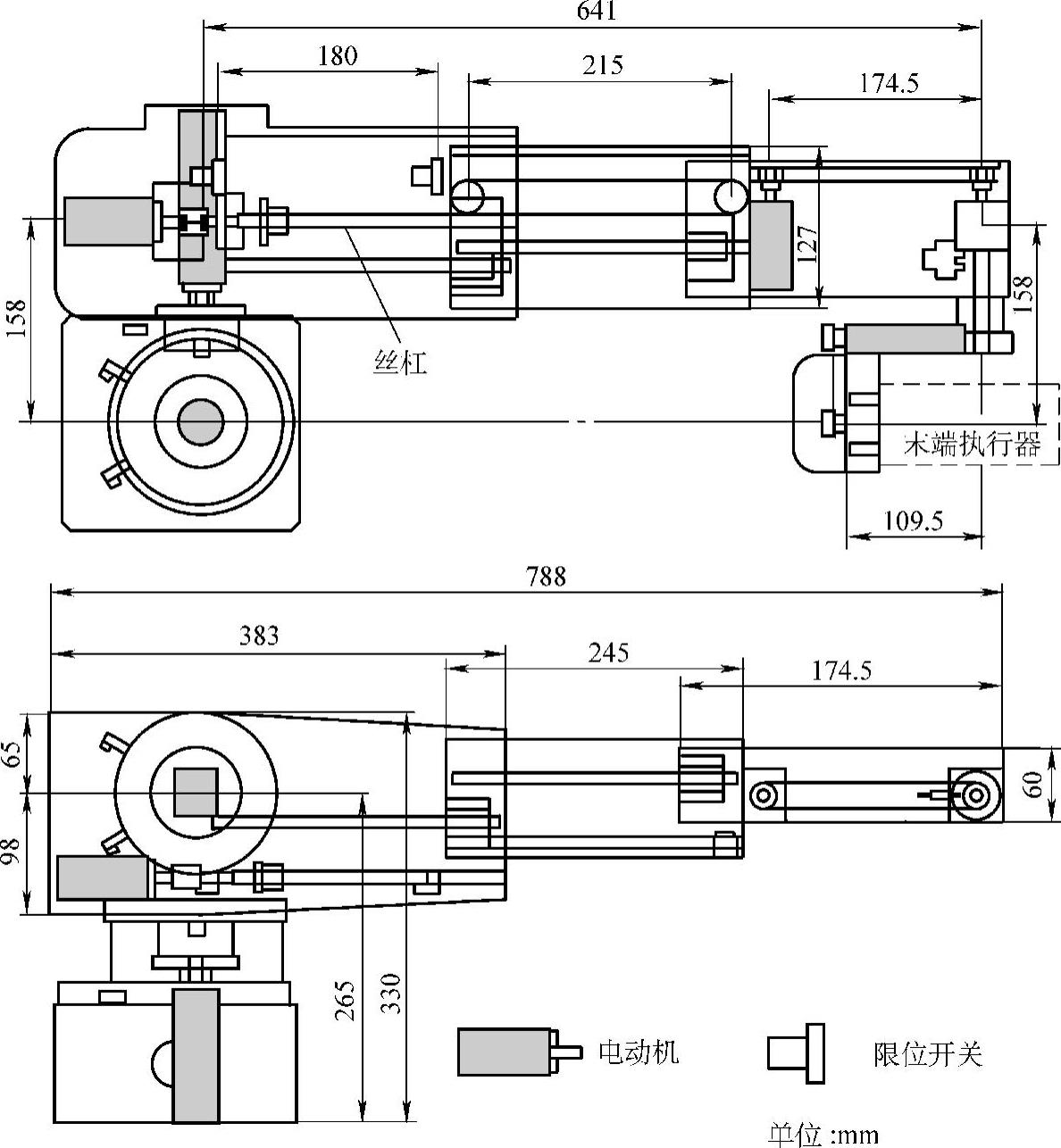
图6-39 高架栽培草莓收获机器人的机械手
(2)末端执行器 草莓收获的末端执行器(见图6-40)与樱桃番茄的相似,依靠真空吸管首先吸住果实,3对光电中断器检测果实的位置。当果实处于适当位置时,手腕转动将果梗送入切断处,弹簧和螺线管驱动刀片切断果梗。
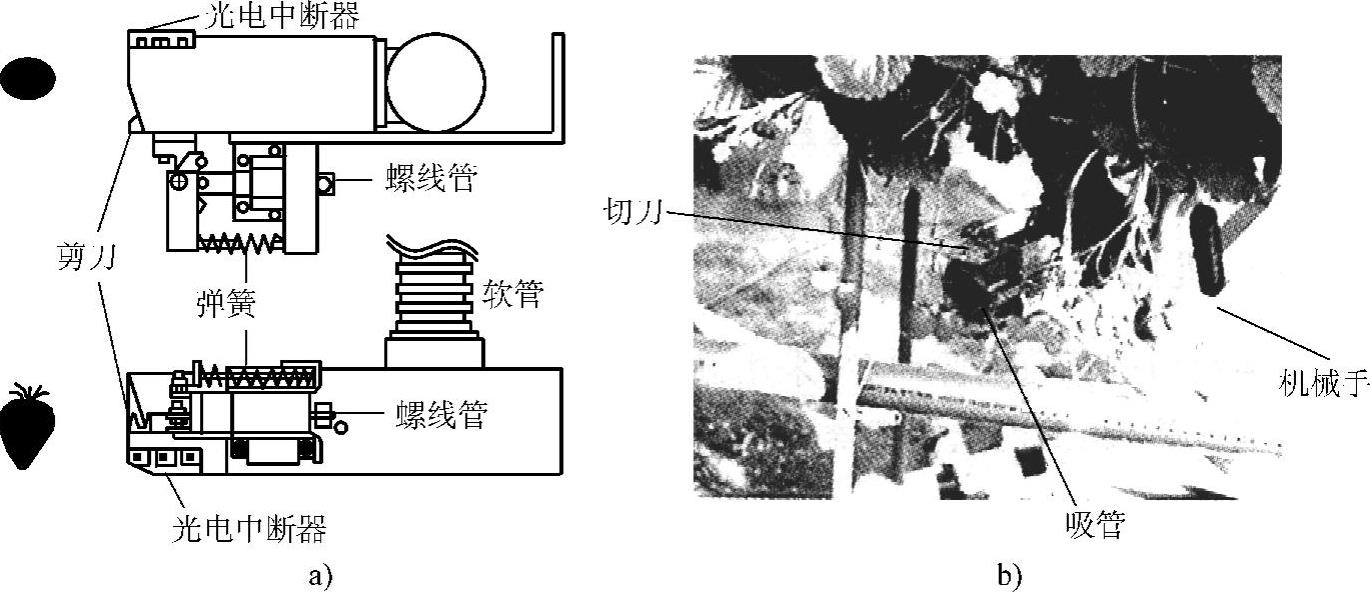
图6-40 高架栽培草莓收获机器人的末端执行器
a)机构示意图 b)实物图
4.草莓拣选机器人
草莓的形状复杂,一般的水果分选原则,如形状、大小、圆度、弯曲度以及长度比等,很难用到草莓上。
(1)草莓的拣选标准 日本的草莓根据规定的规格标准(见图6-41)按颜色、形状及大小进行拣选分类、包装之后才可上市流通。一般地,收获后的草莓可按着色程度分为8分、7分、6分和5分,形状可分为A、B和C等,大小可分为2L、L、M、S和2S级。
(2)草莓拣选机器人的原理 草莓拣选机器人的系统(见图6-42)包括传送带、控制器1和控制器2、空气压缩机、CCD摄像机、照明系统、计算机和图像处理系统。

图6-41 日本草莓的规格标准
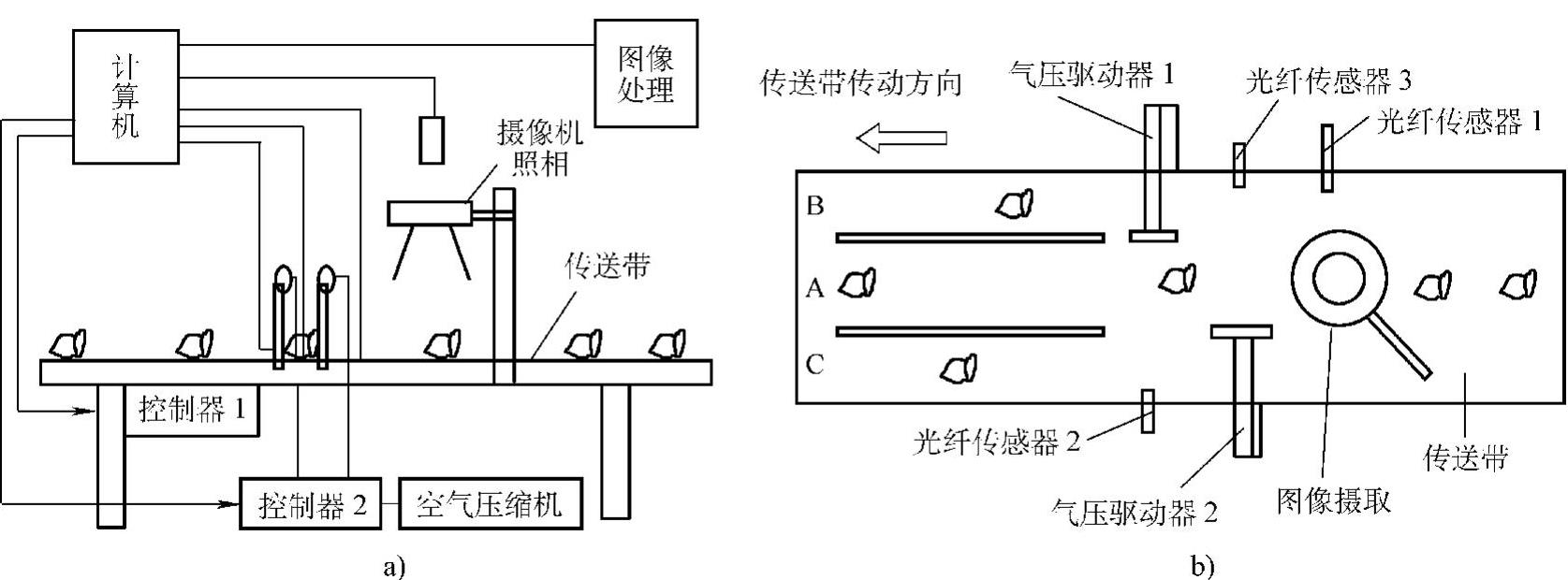
图6-42 草莓拣选机器人的系统图(https://www.xing528.com)
a)主视图 b)俯视图
工作过程为:
①传送带把草莓传送到摄像机下。
②光纤传感器1检测草莓的到位信号,计算机通过图样采集卡采入从摄像机上得到的草莓彩色图像。
③计算机对采入的图像进行处理,抽出形状特征值进行判断,然后输出控制信号到控制器。
④当草莓被判定为A级时,不给气压驱动器1、2供气,草莓自行进入A道;若草莓被定为B级,则给气压驱动器2供气,将草莓推入B道;若草莓被定为C级,则给气压驱动器1供气,将草莓推入C道。
(3)草莓形状特征的提取 专业人员在拣选草莓时,很容易根据果实部分的形状特征来判断其等级,但对于任意放置在传送带上的草莓,计算机采集到的草莓图像的方位是不定的。因此,拣选机器人首先找出草莓的外形轮廓,再对轮廓进行计算,确定形状特征值。
系统采用彩色图像技术获取草莓图形,图6-43a是图像卡采集到的在监视器上以RGB彩色模型显示的图像,它的R、G灰度图像分别如图6-43b、c所示。为了得到如图6-43g所示的草莓形状特征图像,对采集到的草莓彩色图像做以下处理:
1)将图6-43a的彩色图像转变成黑白二值图像,提取边缘信号得到如图6-43d所示的结果。
2)图6-43a的彩色图像减去图6-43b R灰度图像产生目标图像(见图6-43e)。
3)目标图像经二值化和边缘提取处理后,得到如图6-43f所示的果实轮廓线图像。
4)最后把图6-43d和图6-43f进行逻辑与运算后,得到呈现开曲线形的草莓形状特征图像(见图6-43g)。
由此就可以在图6-43g的基础上,抽出草莓的形状特征参数:
1)对呈现曲线状的形状特征图像(见图6-44),用3×3窗口(见图6-45)检出曲线的两端点A和B。
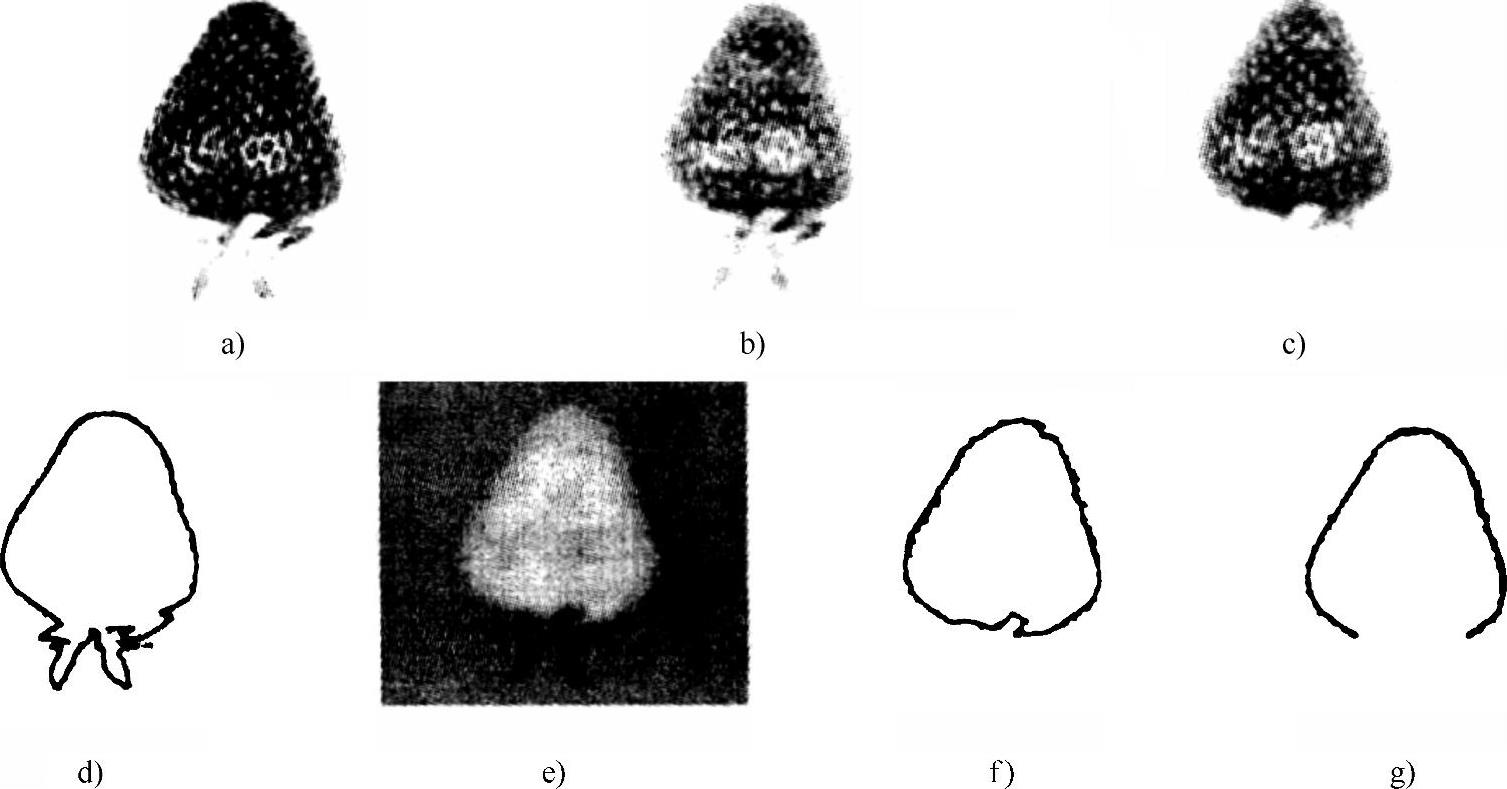
图6-43 不同处理情况下的草莓图像信号
a)彩色图像 b)R灰度图像 c)G灰度图像 d)整体轮廓线图像 e)目标图像 f)果实轮廓图像 g)特征曲线图
2)以A、B为两端点作一条直线,并在此直线的中心点O作一条垂直线,与曲线相交于C点。
3)以CO线为基线,从O点起按±2nπ/32(n=1,2,3,4)的角度向外作射线。
4)这些射线与形状特征曲线相交点分别是L1、L2、L3、L4、R1、R2、R3和R4。
5)根据K1=OL1/OC、K2=OL2/OC、K3=OL3/OC、K4=OL4/OC、K5=OR1/OC、K6=OR2/OC、K7=OR3/OC、K8=OR4/OC可产生一组形状特征参数。
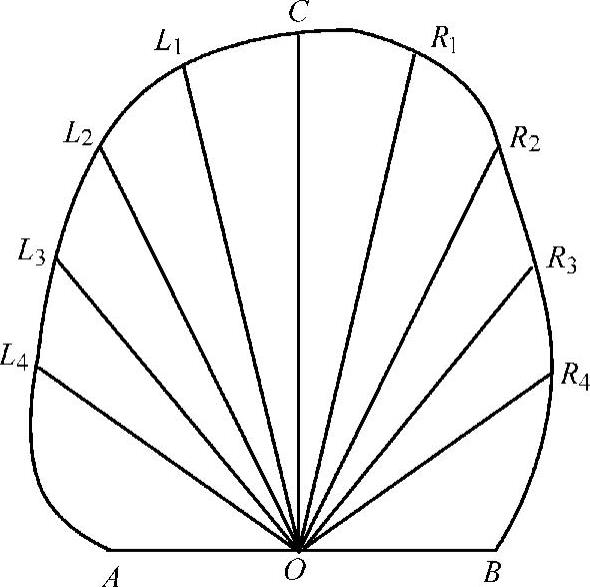
图6-44 草莓的形状特征图像
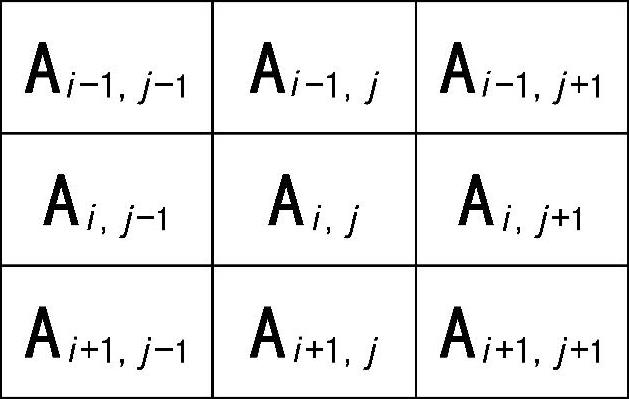
图6-45 3×3检测窗口
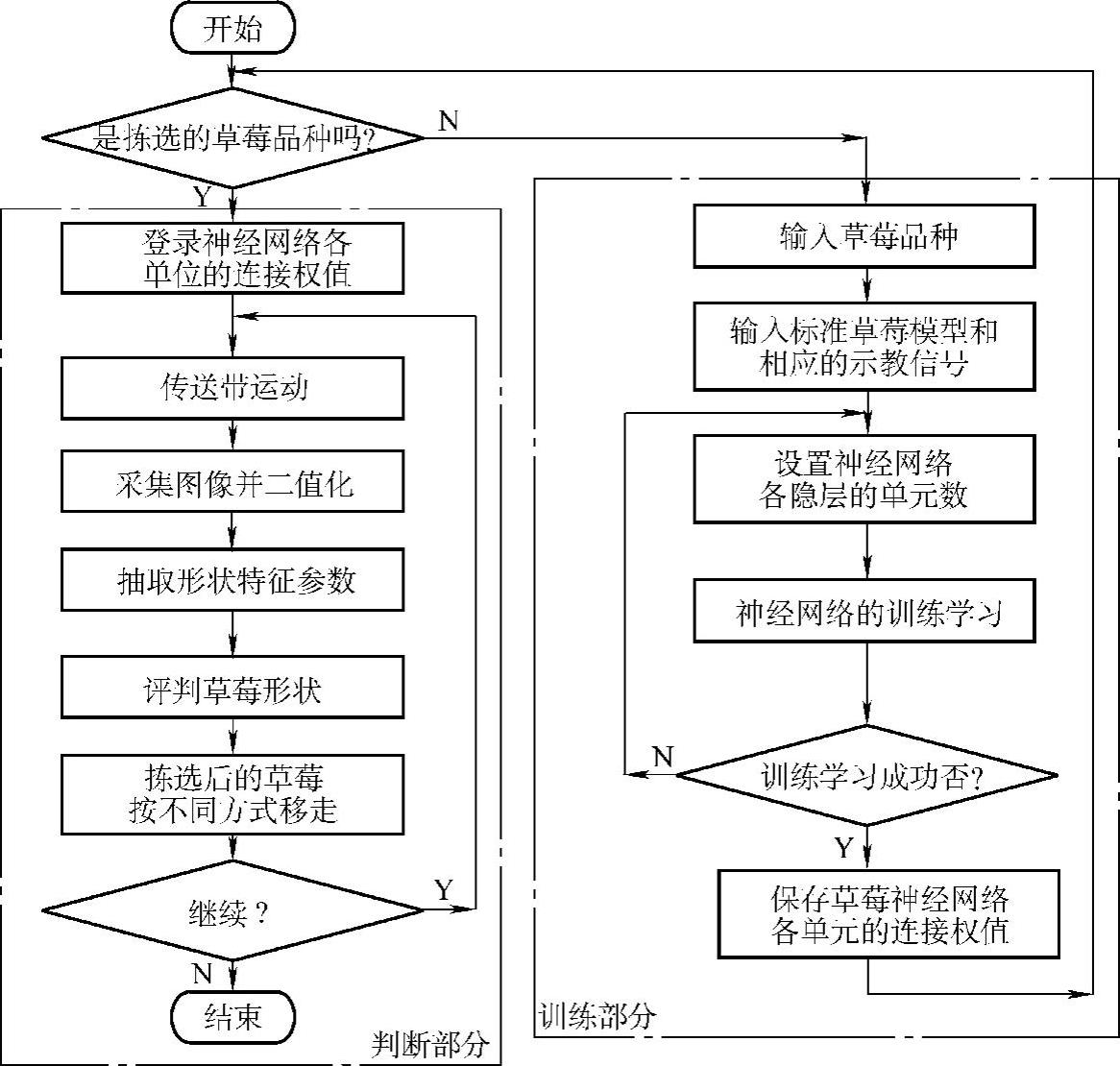
图6-46 草莓拣选机器人系统
(4)基于神经网络的判别 采用神经网络结构(见图6-34),输入层为草莓形状的8个特征值,隐含层的层数根据训练状况而定;输出层为2个,分别控制两个气压驱动器。
(5)流程控制 草莓拣选机器人系统(见图6-46)包括训练部分和判断部分,训练部分的内容包括图像处理、特征抽出和网络训练,判断部分的内容包括图像处理、特征抽出和判断以及草莓移动控制。程序启动后,通过计算机的屏幕和键盘,以人机对话的形式引导机器人进入学习训练和拣选判断状态。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。