



黄瓜是常见的蔬菜,设施农业中的种植面积非常大,并且生长快,成熟后易肥大、收获最佳期短、果实不定期成熟。因此,急需黄瓜收获机器人。
1.栽培方式
设施栽培中常见的黄瓜栽培方式是将黄瓜用细绳垂直向上牵引生长,果实与叶子茎秆混杂在一起,大的叶子经常遮住黄瓜,不利于人工或机器人收获。日本开发了新型的栽培方式——倾斜格子架式培养系统(见图6-23),黄瓜和茎叶分开,使机器人容易检测出黄瓜的位置,完成收获。倾斜格子架与水平面所成夹角越小,果实与茎叶的分离程度将越明显,但当果实越接近地面时,作业空间越小,越不利于机器人收获。因此,倾斜格子架要有一个适宜的角度。
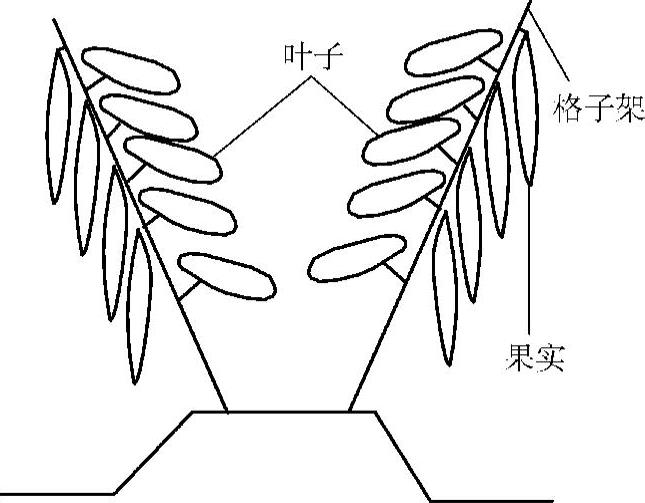
图6-23 黄瓜的倾斜格子架培养系统
2.倾斜格子架栽培黄瓜收获机器人
日本根据黄瓜的倾斜格子架栽培,研制出了黄瓜收获机器人(见图6-24),包括机械手、末端执行器、视觉系统和移动机构。
图6-24 倾斜格子架栽培黄瓜收获机器人
(1)机械手 为适应黄瓜的栽培模式,机械手(见图6-25)在根部有一个与黄瓜倾斜格子架角度相同的直动关节,使整个机械手可以在与倾斜格子架平行的方向移动,另外5个旋转关节可以做出各种姿态,接近果实。
(2)末端执行器 成熟的黄瓜遍身带刺,并且在顶部带有黄花,这些刺和黄花是衡量黄瓜质量好坏的标准之一。因此收获时,必须尽量减少对黄瓜表面的损伤,要轻柔地抓住并切断果梗。
该机器人的末端执行器(见图6-26)包括1个手爪、1个检测器和和1个剪刀。手指先用6N的力在离果实顶部3cm的位置抓住果实,然后检测器和剪刀向上滑动,并且保持检测器与果实一直接触,直到电位计检测到果实与果梗之间的连接点,完成检测,安装在检测器下方的的切刀用12N的力将果梗切断。
(3)视觉系统 由于黄瓜果实与茎叶的颜色相似,该机器人采用远红外传感器检测黄瓜的距离,并利用黄瓜与茎叶不同的光反射波长进行检测。这里采用带有550nm和850nm过滤器的黑白摄像机,利用两个不同的过滤器得到两个图像,按下述公式计算

图6-25 黄瓜收获机器人的机器手

图6-26 黄瓜收获机器人的末端执行器
a)手爪部分 b)检测和切刀部分

由于果实在850nm的的反射强,使果实图像的灰度值增大,而其他对象在850nm的反射比较弱,这样可以很容易区分有阴影果实的阈值。通过比较两个果实的的R值,就可以判断哪个果实的距离更近。
(4)作业流程 该收获机器人收获流程框图如图6-27所示。机器人采用三维视觉传感器,获取果实的位置。张开手爪抓住果实,检测和切断机构上升,直至检测出果梗的位置,判断出果梗的直径是否小于6mm。若小于6mm,检测机构停止上升,切断机构闭合,切断果梗,把持机构闭合,检测切断机构下降,结束作业。若果梗直径大于6mm,重新检测果梗的位置。
3.荷兰黄瓜收获机器人
荷兰黄瓜种植面积和产量都比较大,人工收获费用占整个温室黄瓜生产费用的50%,因此迫切需要自动收获机器人。荷兰农业环境工程研究所研究出一种多功能模块式黄瓜收获机器人。
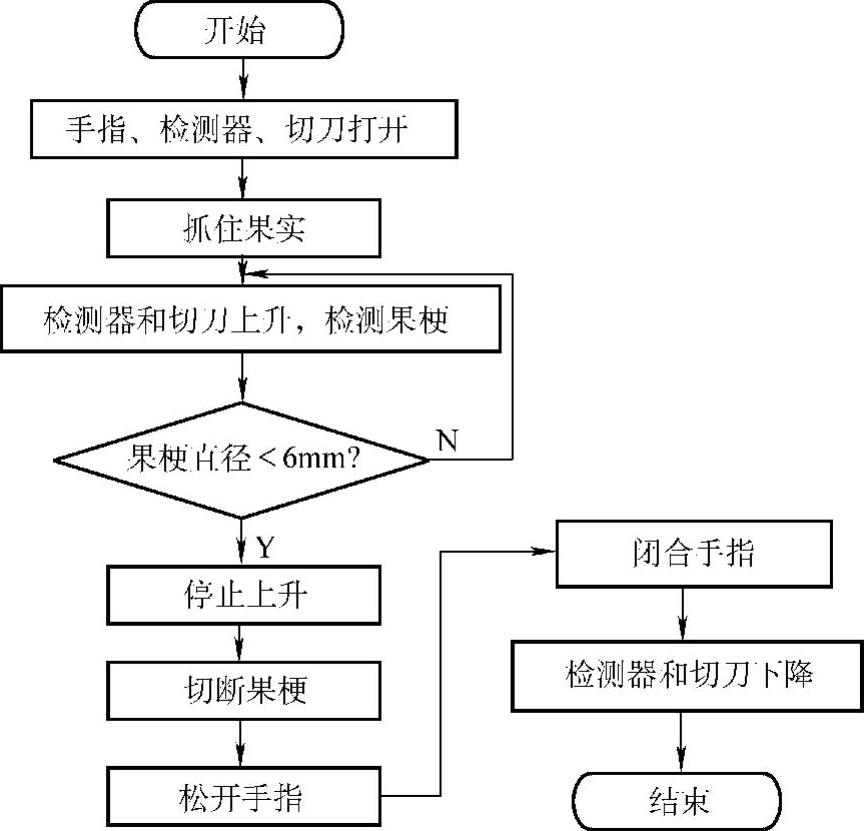
图6-27 倾斜格子架栽培黄瓜收获 机器人的作业流程图
(1)黄瓜生长系统 荷兰黄瓜采用新型高拉线种植模式,每一株植物在垂直拉线上,该垂直拉线绕在一个线轴上,线轴固定在4m高的水平拉线上(见图6-28)。当植物顶部到达水平拉线时,通过线轴将垂直拉线往下放,使作物顶部下降至水平拉线下方500mm处。在降低植物高度之前,应将植物底部的叶子摘掉。
(2)自走式黄瓜收获机器人 自走式黄瓜收获机器人(见图6-29)由4部分组成:行走车、机械手、视觉系统和末端执行器。
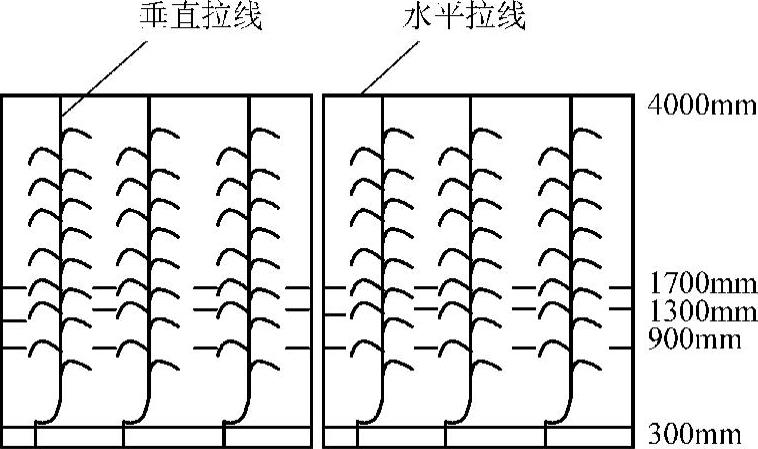
图6-28 新型高拉线黄瓜种植模式
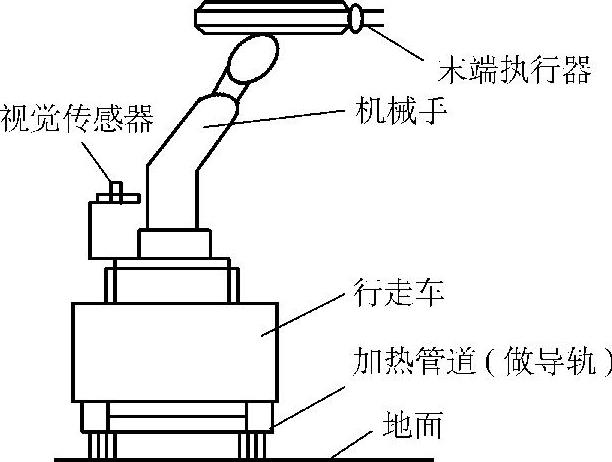
图6-29 自走式黄瓜收获机器人
机器人行走车主要用于机械手和末端执行器的定位,通过视觉系统的信号控制机器人的行走、机械手的动作、末端执行器的抓取和切割动作。机器人的行走速度为0.8m/s,每前进0.7m就停下来进行收获作业。(https://www.xing528.com)
该机械手有7自由度,主体采用三菱(Mitsubishi)RV-E2型6自由度机械手,在此基础上增加了一个直动关节,使RV-E2型机械手可以沿着行走方向往复运动。
视觉系统由两台摄像机和图像处理系统组成。在采用机器人收获时,能对作业区域内的黄瓜进行探测,评价果实的成熟程度,找出果实的精确位置。
黄瓜的果实与叶子的颜色相近,通过对黄瓜果实与叶子的反射性及含水率的大量研究得知,可采用近红外线(NIR)探测出黄瓜果实。黄瓜的图像处理系统包括两台数字式摄像机、滤光片、透镜、反射镜和棱镜,可以将果实同周围背景物区分开,从而辨认出果实并探测出其位置(见图6-30)。
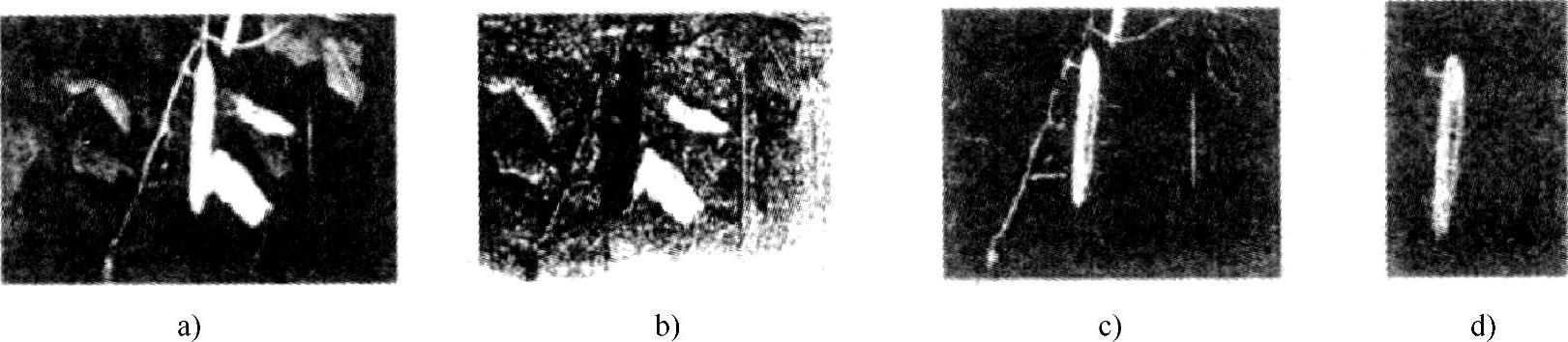
图6-30 不同处理条件下的黄瓜图像
a)经过处理的黄瓜图像 b)采用干涉过滤后的黄瓜灰度图 c)运用阈值移出果实背景物的一些信号 d)除掉周围背景物,只保留果实
黄瓜在植物上方的分布是随机的,不定期成熟,因此在收获前必须探测出每一根黄瓜的位置及成熟程度。在清晰条件下(收获前摘掉叶子),通过测量黄瓜的直径和长度,并依据其体积估算果实的成熟度。
在末端执行器上安装了一个手指大小的微型摄像机,用于快速和精确定位。为了精确测定在切割装置两个电极之间的果梗的位置,还采用了一个局部传感器,可以在0.3m范围内测量果实位置。
末端执行器由手爪和切割器两部分组成。手爪的力度适中,既保证果实在机械手快速运动过程中不掉落,又不损伤黄瓜果实的外表面。切割器采用电极切割法,产生高温(大约1000℃)将果梗烧断,形成一个封闭的疤口(火烧),可以减少果实水分的流失,减慢果实的熟化程度。
机器人的采摘过程分4步进行:找到果实果梗精确的切割位置;将果梗放到切割器的两个电极之间;抓取果实;切割果梗。该机器人的作业速度为每根黄瓜10s。
4.日本东京大学研制的黄瓜收获机器人手爪
日本研制的黄瓜收获机器人的另一种手爪(见图6-31a),包括夹钳部(见图6-31b)、传感器和刀片部(见图6-31c)和自由旋转部(见图6-31d)。夹钳部由电动机、传感器、手指和微型开关组成,手指内侧是橡胶层,避免伤害果实。传感器和刀片部包括电动机、夹杆、刀片、刀片限位开关和果梗检测开关,实现对果梗的检测和切断。自由旋转部包括电动机、轴、滑动轴承、导向轴、支杆,可以调整夹杆的滑动。作业过程是:手爪内部的接触传感器检测出黄瓜,夹钳部用约70N的力夹住黄瓜身部,传感器和刀片部的夹杆用约3N的力夹住黄瓜头部;夹杆由自由旋转部驱动,可以沿黄瓜长度方向上下滑动,也可以前后、左右转动,夹杆沿黄瓜轴向滑动,可以检测出黄瓜的直径。当黄瓜的直径突然变小时,就确定是黄瓜蒂部,微型开关检测出其精确位置,刀片切断黄瓜果梗。
5.黄瓜的等级级别
为提高黄瓜的商品价值,有必要对黄瓜进行分级。黄瓜属于长形瓜类,人工分级时主要以瓜的均匀性、长度、直径等作为评价指标。日本经济农业协同联合会制订出了黄瓜的等级标准,黄瓜的品质等级分为A、B、C级3个等级:A级形状匀称,弯度不超过1.5cm,色泽和鲜度品质良好,无病虫害;B级形状较为均匀,弯度不超过3cm,鲜度品质良好,无病虫害;C级畸形,弯度超过3cm,过熟,有疤痕。黄瓜的等级按质量分为2L、L、M和S,重量分别为130g、110g、95g和80g左右。
等级判别硬件装置(见图6-32)包括CCD摄像机、图像采集卡、计算机、日光灯型的照明装置和监视器。
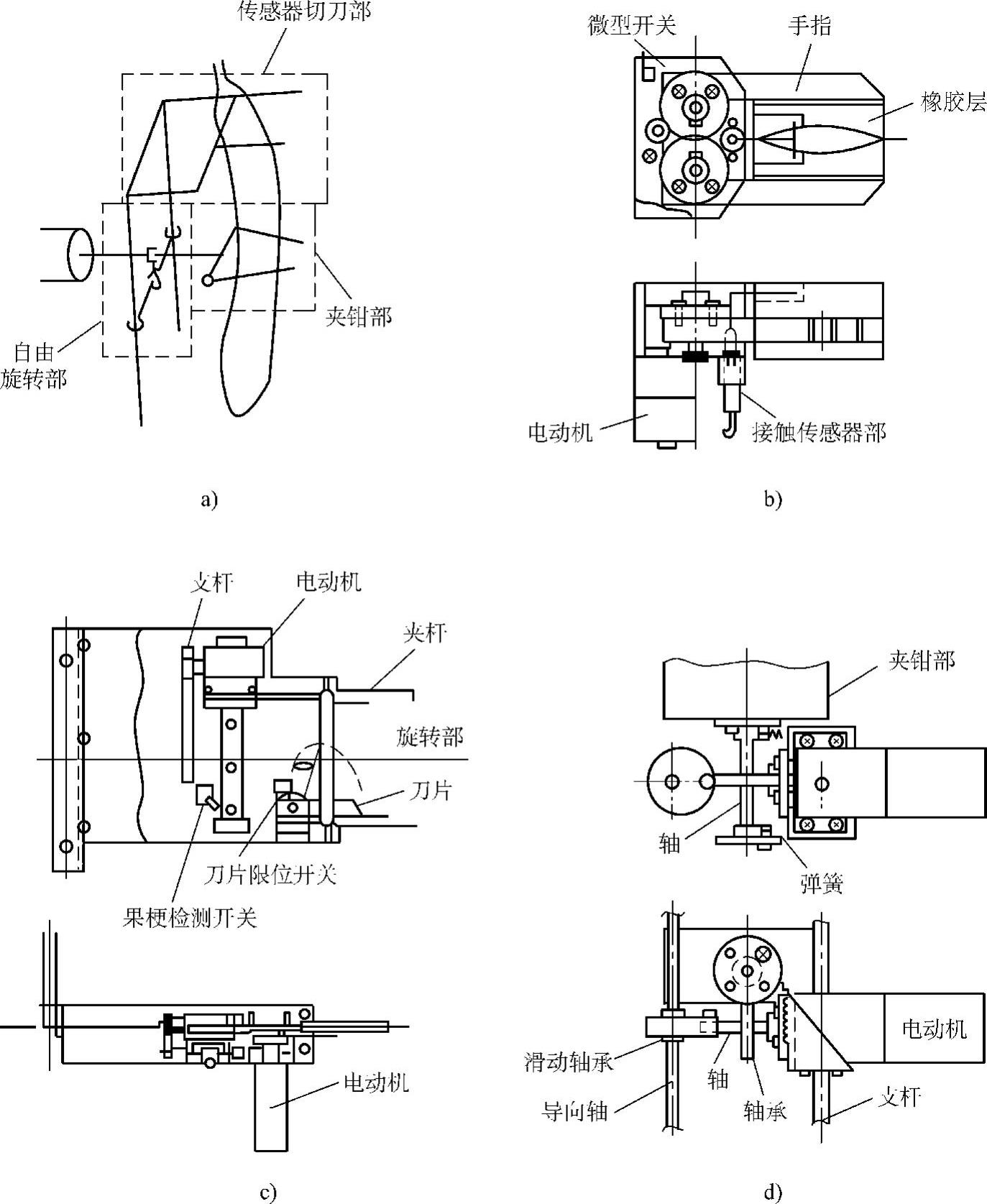
图6-31 日本研制的黄瓜收获机器人手爪
a)手爪构成 b)夹钳部 c)传感器和刀片部 d)自由旋转部
根据黄瓜特征(见图6-33)的二值图像,提取粗细、长度和弯曲度3个方面的参数。瓜果根部到顶部的距离为H,从根部开始分别在0.1H、0.25H、0.5H、0.75H和0.9H相应的位置,找出果实的中心点A、B、C、D和E,连接各点得到l1、l2、l3和l4。再从根部开始,在0.2H、0.3H、0.7H、0.8H的位置分别作l1、l2、l3和l4的垂线,检出果实的宽度W1、W2、W3和W4。C点的宽度W按水平方向检出,点A和E之间的距离定义为L。由此可得出定义形状特征的函数:


黄瓜的形状特征采用前向多层神经网络(见图6-34)进行判断。神经网络包括输入层、隐含层和输出层,输入层为与6个参数相对应的6个输入单元,输出层为2个输出单元(用于表示3种等级状态A、B、C),隐含层的单元数要根据训练状况决定。

图6-32 黄瓜等级判别装置
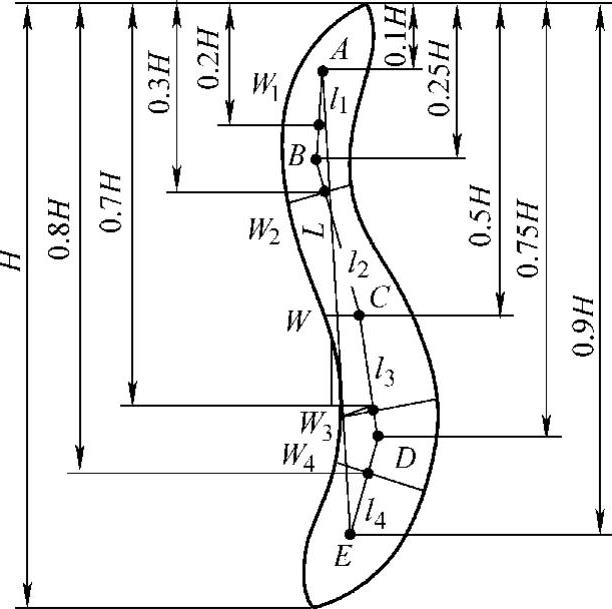
图6-33 黄瓜形状特征的提取

图6-34 神经网络结构
长形瓜果等级判别程序(见图6-35)从功能上可分为学习部分和判别部分。学习部分包括图像处理、特征抽出和网络训练;判别部分包括图像处理、特征抽出、特征判断和结果显示。通过计算机上的屏幕和键盘,以人机对话的方式引导挑选机器人进行学习训练或挑选判别状态。
该系统还适合其他长形瓜果的判别,具有较高的准确性、通用性和简便性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。