



机器人在进入生物生产系统领域的早期,是从果实收获开始的,但由于果实多种多样、环境复杂等因素,收获机器人至今仍是研究的热点。番茄是人们常见的蔬菜,其果实呈红色,与绿色的背景相差大,用彩色摄像机就可以辨认。
1.栽培方式
设施农业中的番茄通常种植在垄上,番茄呈垂直生长,果实暴露在外侧,有部分叶子的遮挡。传统栽培和高架栽培的番茄果实与果梗的连接方式(见图6-5)不同,可以采用不同的采摘方式。传统栽培中在果梗处有结点,通过折断或强力拉扯都可使果实脱落。
2.龙门式5自由度番茄收获机器人
日本农林水产省农业研究中心根据地块的大小,在田埂上分别铺上铁轨,将龙门车架横跨在田地上方,沿铁轨移动。收获机器人安装在龙门车架上进行收获。
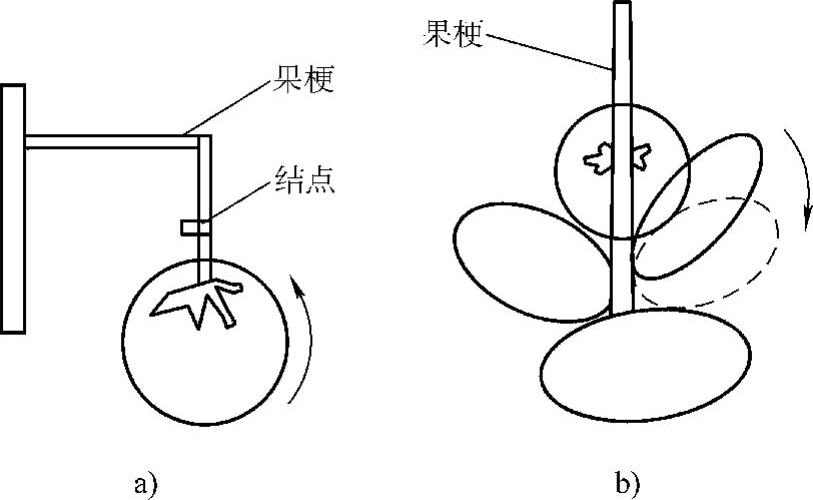
图6-5 果实摘取方式
a)传统栽培方式 b)高架栽培方式
(1)机械手和末端执行器(见图6-6)该机器人属关节型机器人,在手腕的法兰盘处,安装了拥有视觉部和刀具部的末端执行器,采用半圆环状的刀片收获果实。
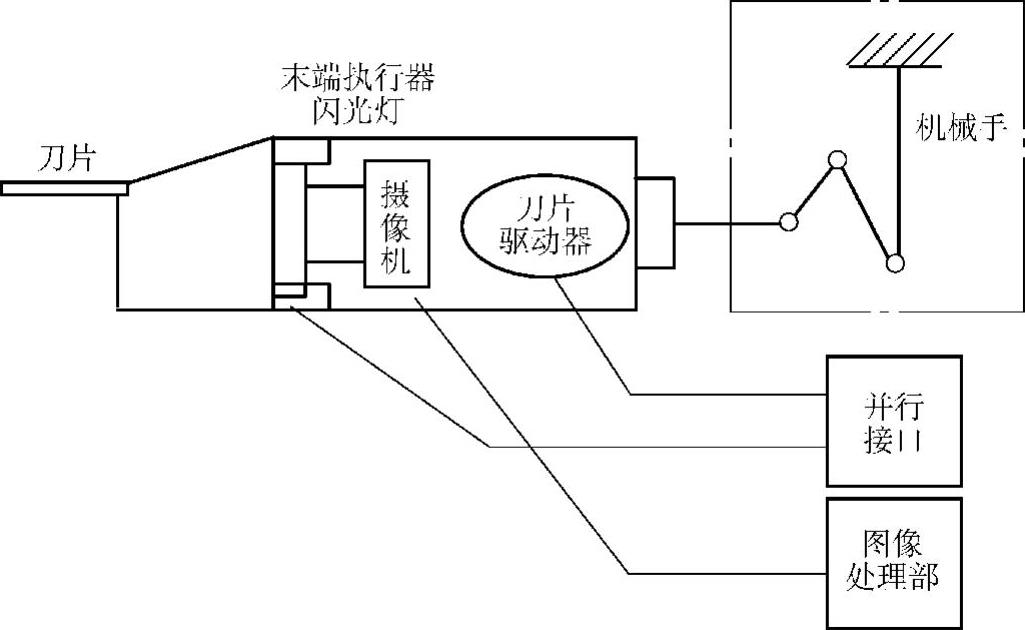
图6-6 龙门式5自由度收获机器人的机械手和末端执行器
(2)视觉系统 该收获机器人的末端执行器上安装有小型电视摄像机和中心波长为680nm、半值幅为10nm的光波过滤器,与闪光灯组成视觉系统。果实位置的检测方法如下:
①从输入的图像数据中计算出果实图像的重心,沿着重心的方向,机械手向最近的果实移动。
②采用三角测量法,通过机械手移动时,各关节的移动量测定机械手到果实之间的大概距离。
③以这个距离信息为基础,使末端执行器接近所要摘的番茄。
④以番茄的直径为收获条件,判断图像中的番茄直径是否达到或超过某值,若满足条件就将其摘下。
3.7自由度番茄收获机器人
日本根据番茄传统的栽培模式,研究了5自由度的番茄收获机器人,但实际收获效果不是很理想。在此基础上,又研制了7自由度的番茄收获机器人。
(1)机械手 将5自由度关节型机械手安装在上下、前后能够移动的直动关节座上,既可以摘取高处的果实,又可以从下向上接近果实,形成7自由度机械手(见图6-7)。这种机械手适合传统生产方式的番茄收获。
(2)末端执行器 末端执行器(见图6-8)由1个吸盘和2个手指组成,吸盘在手爪的中间。10mm厚的吸盘首先吸住果实,防止果实受伤。手指的长度、宽度和厚度分别为155mm、45mm和10mm,手指的抓取力可以在0~33.3N之间进行调节,吸盘由直流电动机和齿轮驱动,速度可以达到38mm/s。
1)吸盘的运动。吸盘的后面连接一个检测阀,真空泵产生一定的真空压力,使吸盘吸住果实,吸力为0~10N。压力传感器与检测阀相连,通过管路检测空气压力。检测阀位于吸盘和真空泵之间,通过空气的流动检测出气体压力。当吸盘没有吸住果实时,空气从吸盘通过检测阀流向真空泵;当吸盘吸住果实时,气流停止流动,检测阀关闭,此时,吸盘内的气体小于真空泵的气压(见图6-9)。
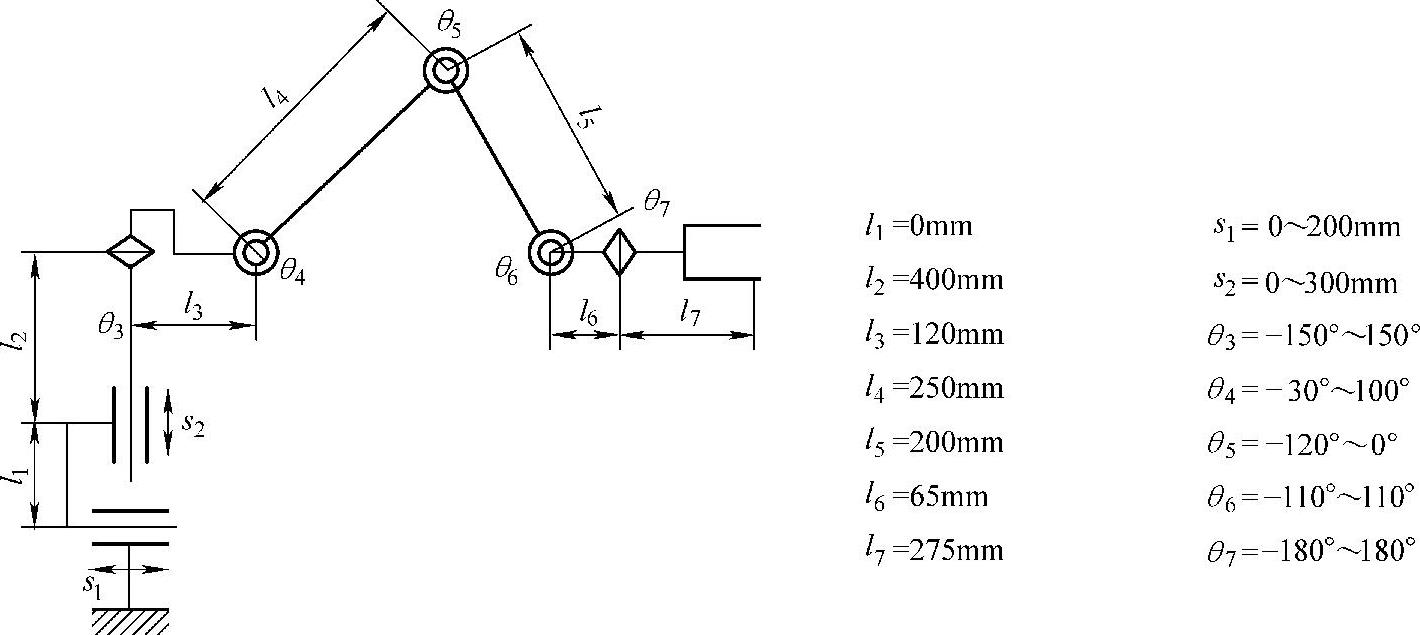
图6-7 7自由度机械手
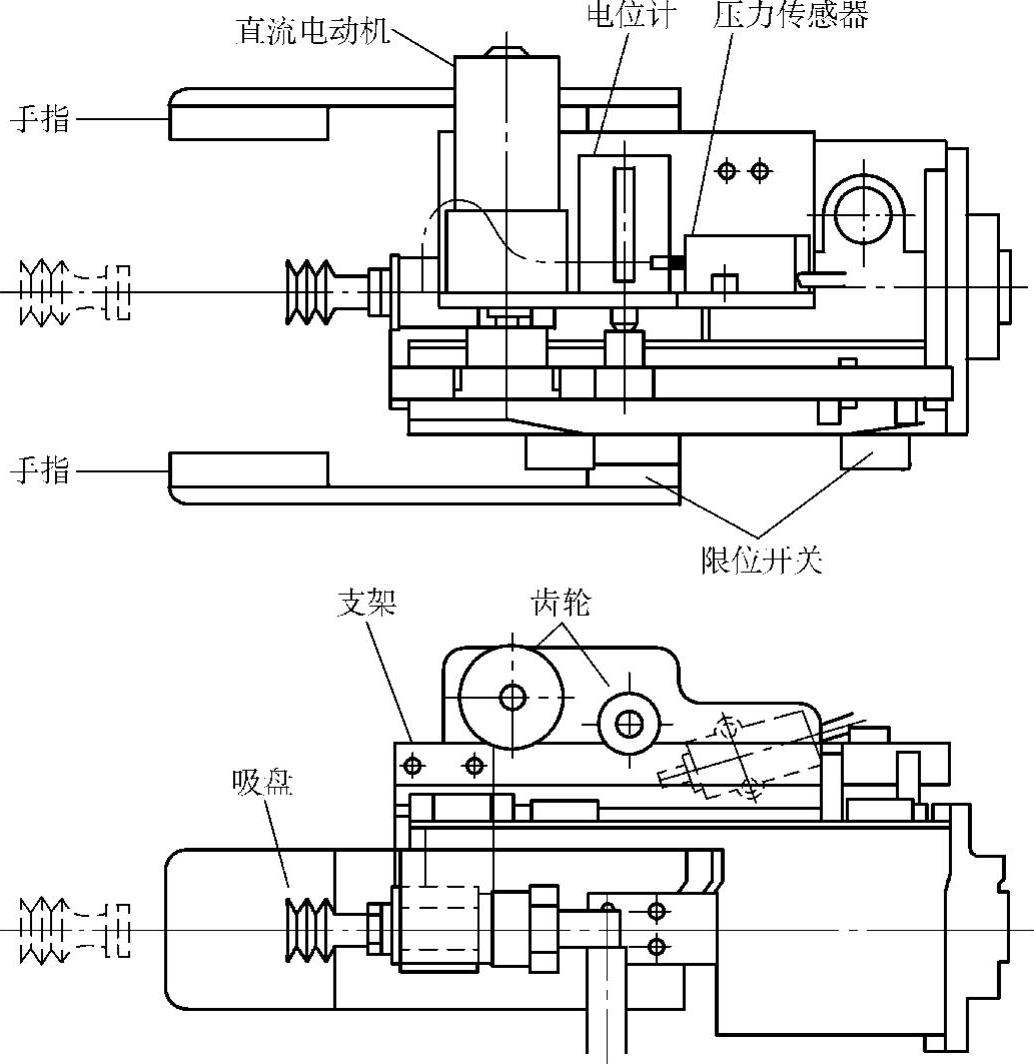
图6-8 末端执行器
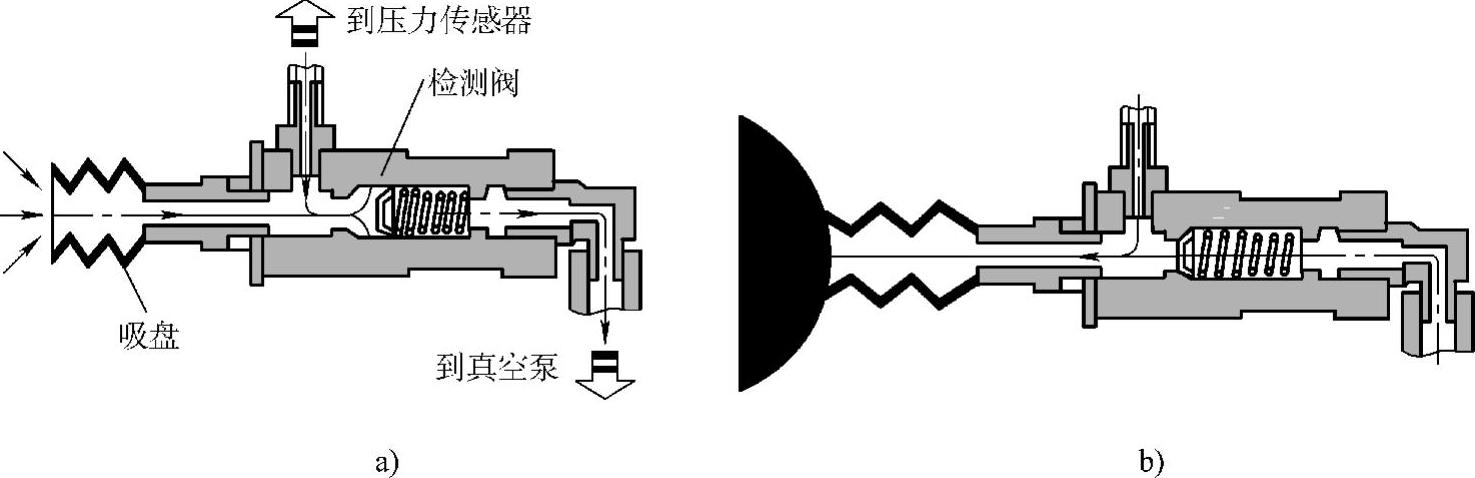
图6-9 吸盘和检测阀的运动
a)吸盘没有吸住果实时 b)吸盘吸住果实时
2)末端执行器的运动。末端执行器运动的方式如图6-10所示。当机械手带动末端执行器接近目标时,吸盘首先伸出,接近目标并吸住果实,向后运动。此时,手指以与吸盘相同的速度伸出,夹住果实;末端执行器抓住果实后,拧断果梗,摘下果实,将果实放在盘中。
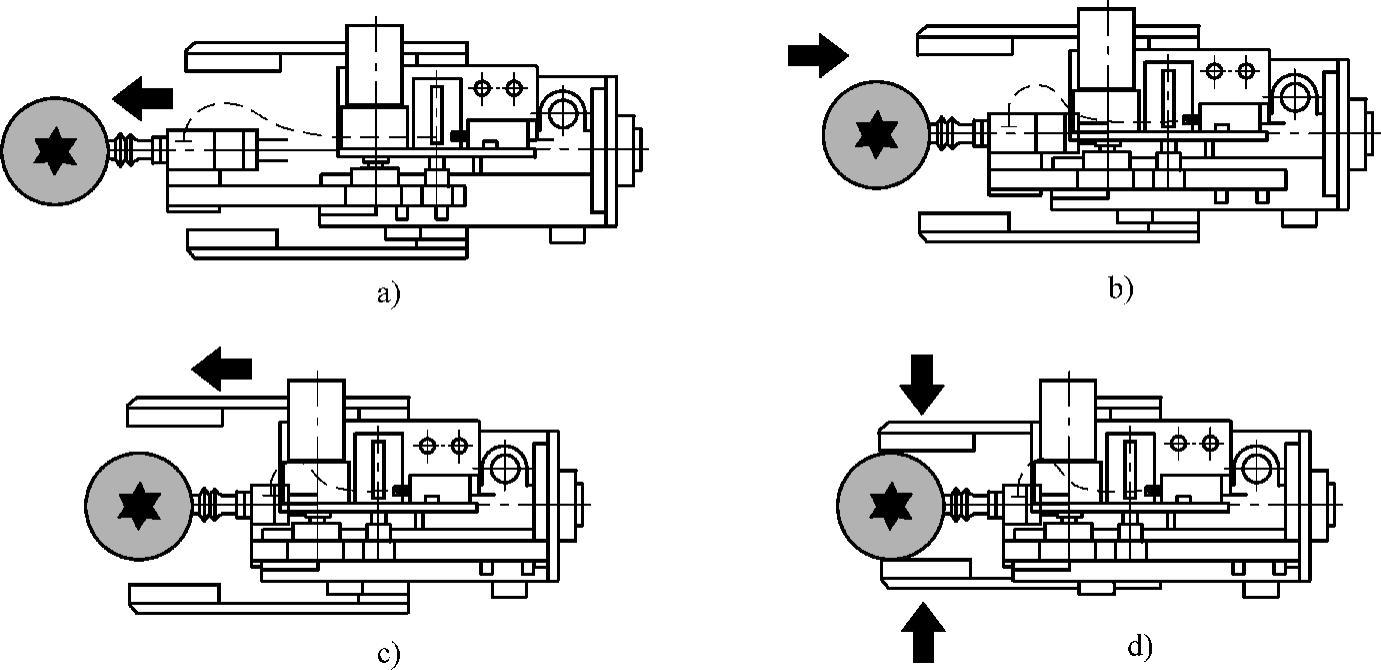
图6-10 末端执行器运动的方式
a)吸盘向前运动,吸住果实 b)吸盘向后移动,直到压力达到极限点 c)手指向前运动,与果实保持一定的垂直距离 d)手指抓住果实
(3)3D视觉传感器3D视觉传感器(见图6-11)用来检测对象的三维形态。该传感器有两个激光二极管,从绿色背景中检测出红色的果实,其中一个用红光(670nm波长),另一个用红外线光(830nm波长),二者有同样的光轴。这些光被以不同频率发射,由一面镜子将其反射。光从对象表面通过聚焦镜反射到位置检测装置,位置检测装置有两个极,反射回来的光点位置不同,两个极的电流比就不同,由这些电流的比就可以计算出对象的距离。对象在垂直方向上可通过两个镜子完成扫描,两个镜子分别由步进电动机驱动,在水平方向上的运动可通过架子的旋转来完成,由此获得对象的三维图像(见图6-12)。
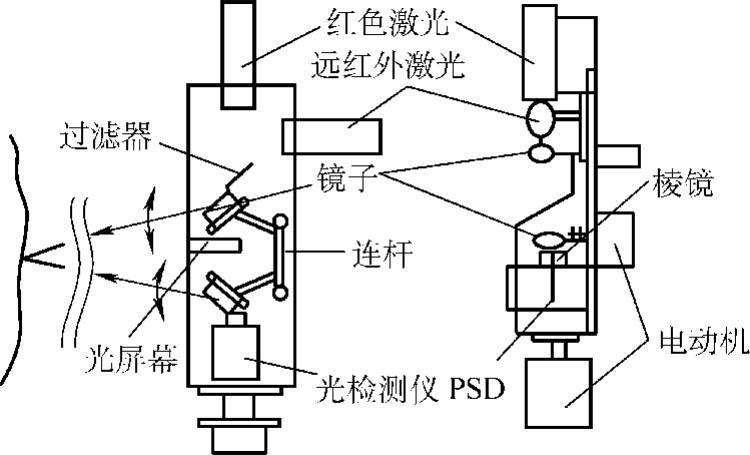
图6-11 3D视觉传感器
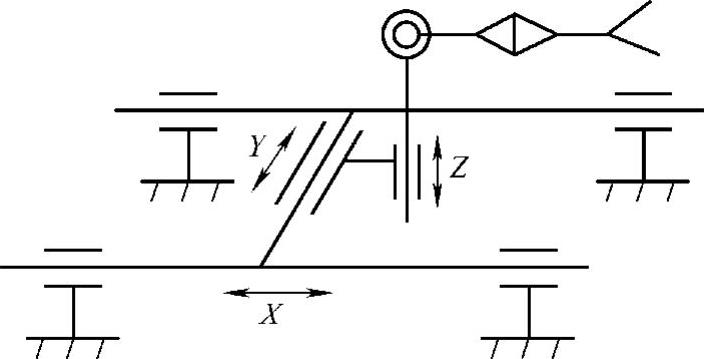
图6-12 5自由度直角坐标式机械手
4.高架栽培番茄采摘机械手
(1)机械手 在单串高架番茄生产系统中,果实垂落在垂直面上,果实周围的障碍物少,可采用如图6-12所示5自由度直角坐标式机械手进行采摘,控制简单,定位精度高。
(2)手爪 采用一种带有吸盘的手爪(见图6-13),手爪有4个具有弹性的手指和1个吸盘,没有切刀。4个手指均匀分布在吸盘的周围(见图6-14),相对两个手指的距离为60mm。每个手指有4个关节(见图6-15),关节是由橡胶制造的,橡胶关节固定在一个支架上。一条缆绳固定在关节的内侧,可以拉动关节。每个手指的外径、厚度和长度分别为10mm、2mm和60mm。当缆绳不用力时,手指张开;当缆绳受力拉紧后,带动关节弯曲,形成不同的弯曲角度,从而使手爪形成不同的内部容积,适合收获不同形状的果实。(https://www.xing528.com)
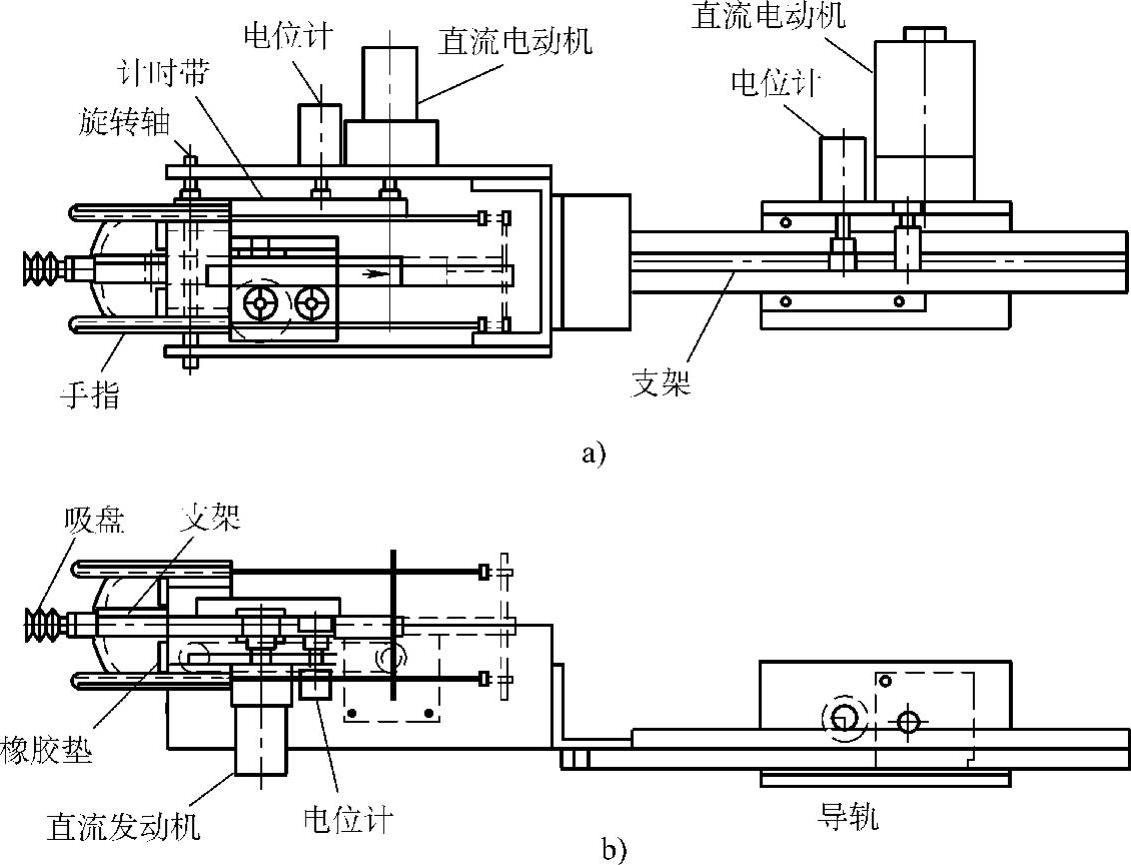
图6-13 手爪
a)俯视图 b)主视图
图6-14 手指的分布
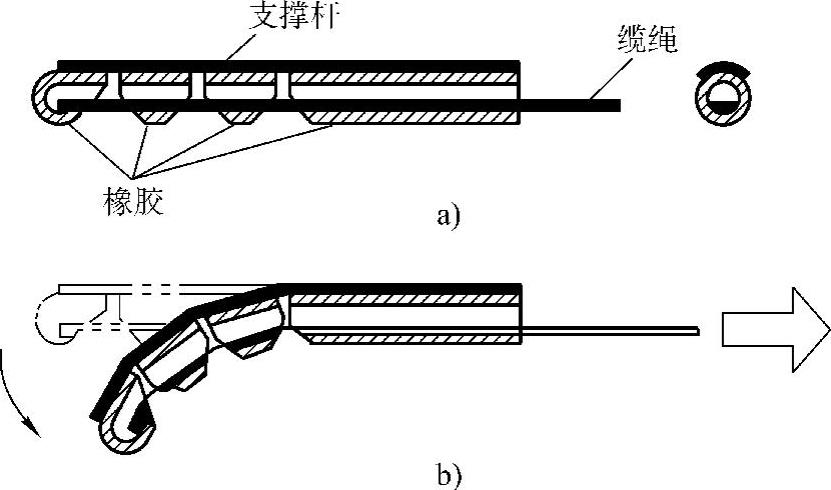
图6-15 单个手指的结构
a)运动前 b)运动后
5.日本京都大学研制的番茄收获机器人
日本京都大学针对番茄的垄作栽培研制了番茄收获机器人(见图6-16),主要包括电瓶车、5自由度关节型机械手、末端执行器、摄像机和微型计算机。电瓶车靠微型计算机控制行走和停止,摄像机检测出果实的位置后,机械手和末端执行器进行收获。
(1)末端执行器 末端执行器采用左右安装的、内侧贴有一层橡胶皮的弯曲手指,手指的张开和闭合采用小型直流电动机驱动,通过控制电流的强度控制手指的力度,并通过拉扯摘下果实。但手指的力度不易控制,因此设计了柔性手爪(见图6-17a)。
如图6-17a所示为有3个橡胶手指的柔性手爪,采用了气压驱动橡胶人工肌肉作为执行机构,能柔性地抓住果实且不易脱落。
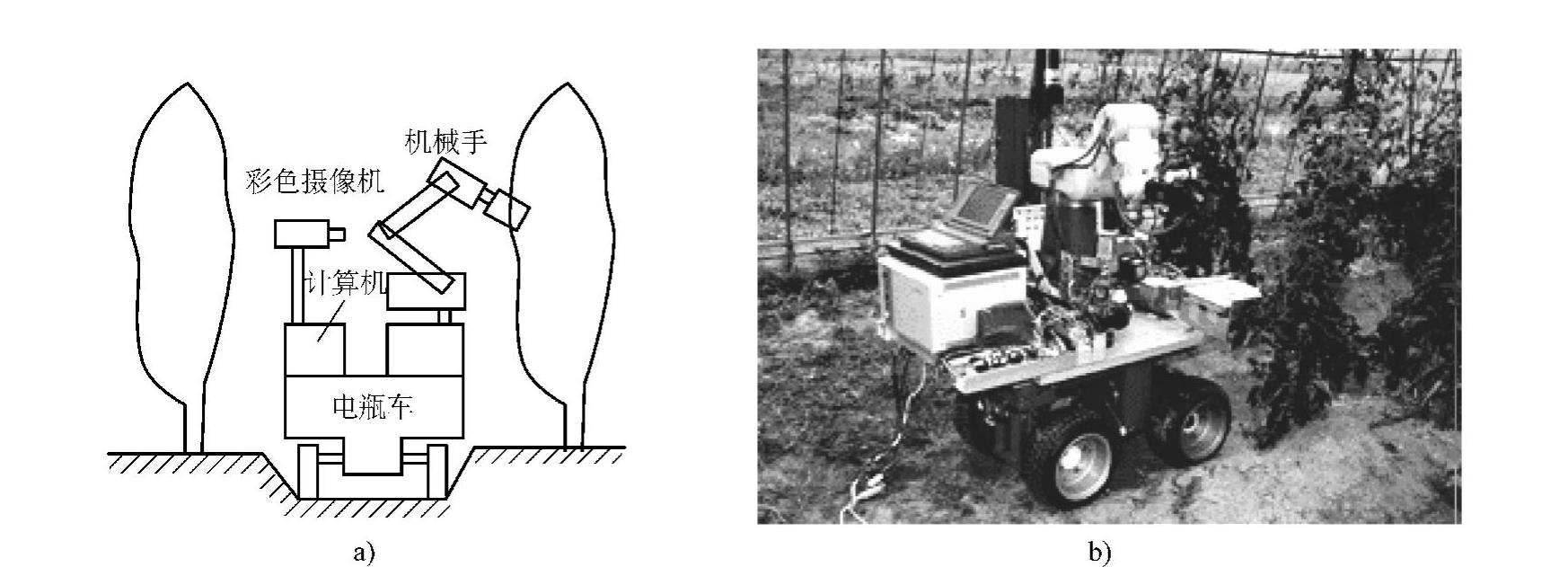
图6-16 京都大学研制的番茄收获机器人
a)结构示意图 b)实物图
旋转式手爪(见图6-17b)的旋转部可随果梗导轨转动包围果实周围,采用直流电动机控制旋转部,使果实大体能滑进旋转部的中间位置,来收获果实。该手爪能够有效地修正机械手的误差,利用果梗导轨将果实滑落手爪的内侧,通过旋转,果梗沿导轨滑到A处,靠旋转转矩折断果梗的结点摘取果实。若这个旋转转矩不能摘取果实,则同一电动机驱动切枝刀片切断果梗,使果实脱落。
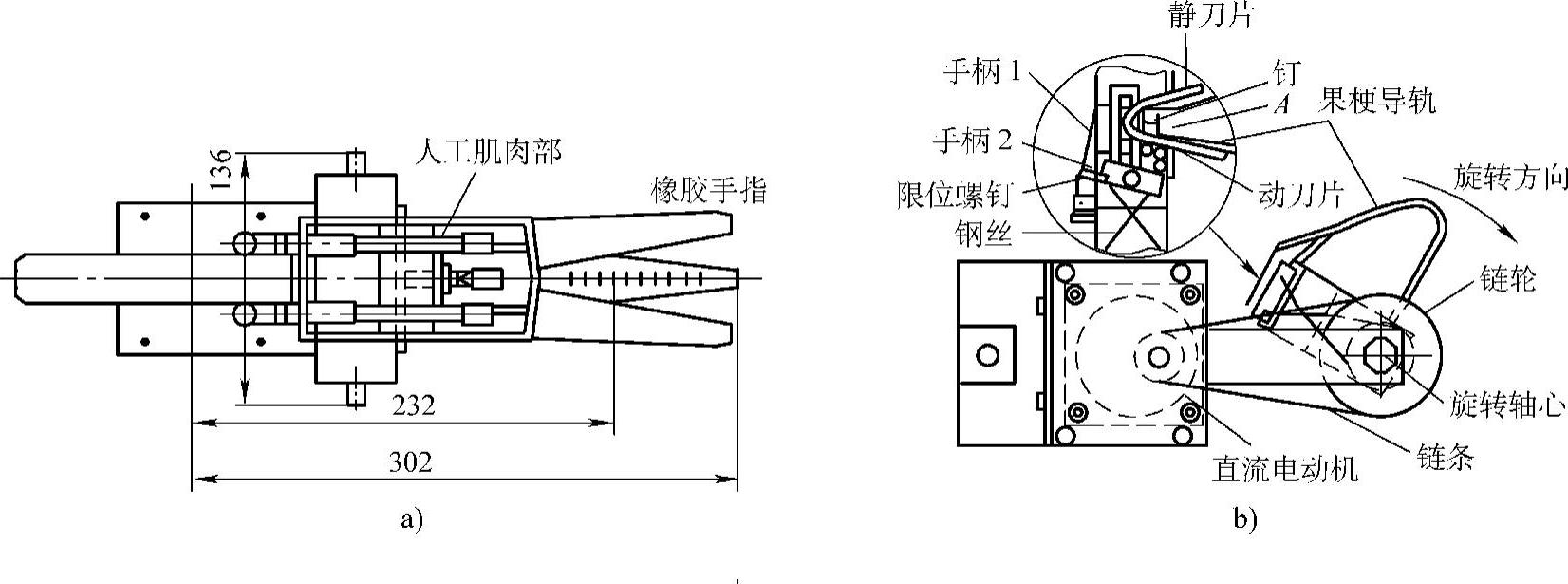
图6-17 手爪结构
a)柔性手爪 b)旋转式手爪
(2)收获作业 番茄收获机器人的收获流程如图6-18所示。电瓶车移动时,机械手处于易移动、不碰到周围作物的状态。电瓶车停止后,摄像机输入图像,利用两眼立体视觉器检测红色果实的位置,将此位置变换成机械手坐标系的位置,判断是否在收获范围内。若可以收获,判断是否在此位置收获第1个果实。若是,此位置为第1个点,则转C处计算摘果实要通过的第2点坐标,然后机械手通过第2点靠近并拧断果梗。计算第2点到第1点的坐标距离,手腕向下倾斜,手指张开,将果实放入收集筐中。
6.樱桃番茄收获机器人
樱桃番茄是最近几年新开发的一种新产品,一个果柄上可以结多个果实,并且有的果实已经成熟,而有的未成熟,因此,收获时需要进行选择。此外,收获时必须带有果梗,才能拥有较高的商品价值。
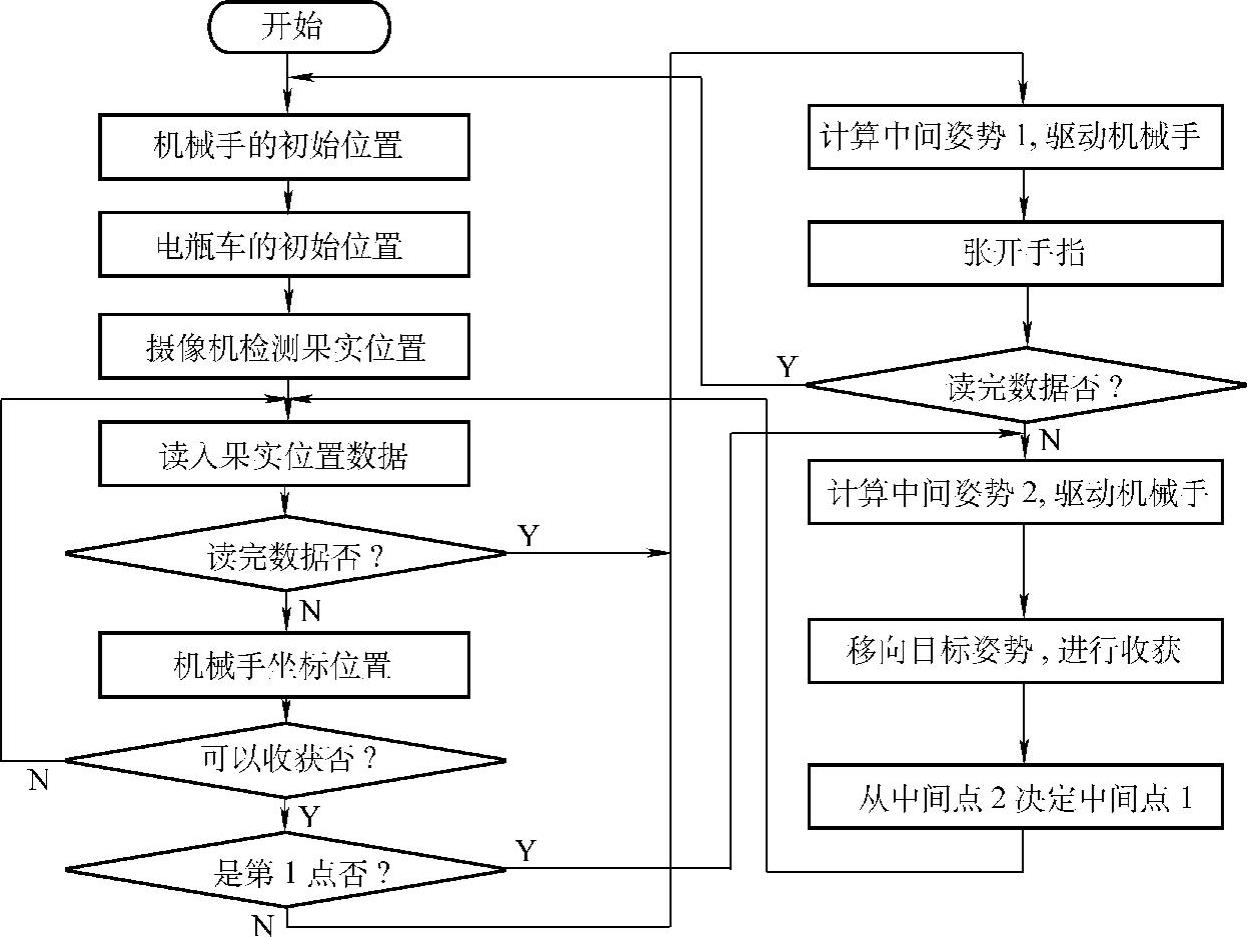
图6-18 番茄收获流程图
(1)极坐标收获机器人 极坐标樱桃番茄收获机器人(见图6-19)可以进行选择性收获,机器人主要包括小电瓶车、一个机械手、末端执行器、3D视觉传感器和控制系统。
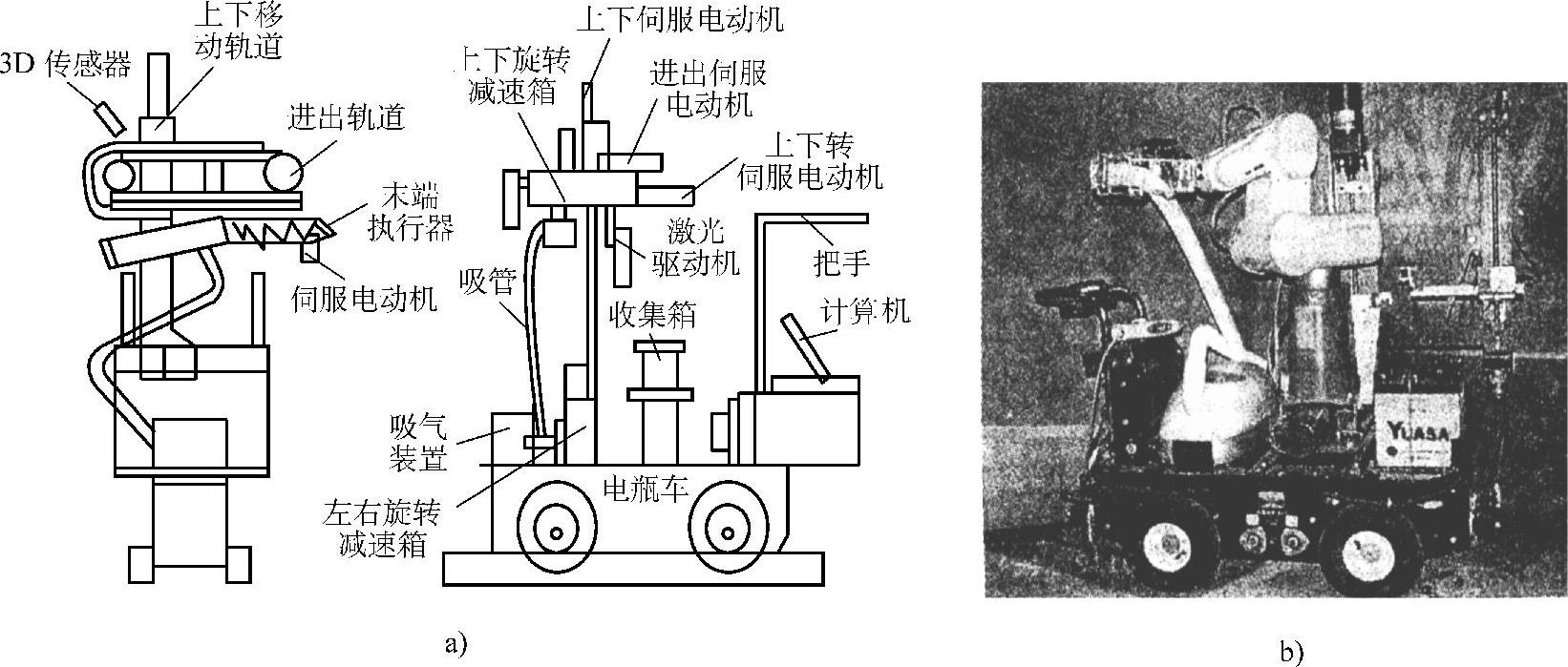
图6-19 樱桃番茄收获机器人
a)结构示意图 b)实物图
机械手具有5个自由度,可以上下转、左右转、上下前进、里外前进和弯曲,使末端执行器能够到达任何想要到达的位置。所有的运动由4个100W的伺服电动机驱动,机械手可以在左右方向进行弯曲运动。
该机器人采用3D传感器检测番茄的位置。末端执行器采用吸管式,可以吸住果实。末端执行器后面连接一个长管,当吸住果实并切断果梗后,果实直接通过吸管内部输送到收集箱。
(2)多功能机器人 日本研制的多功能机器人类似于番茄收获机器人,只要更换其末端执行器、传感系统和软件,就可以进行多种作业。收获樱桃番茄的末端执行器(见图6-20)包括吸管、夹子、弹簧、线圈和3对光电传感器等。当吸管吸住果实后,通过3对光电传感器检测果实的位置(见图6-21)。如果果实位置合适,夹子就将果梗剪断,将果实通过气管进入收集箱中。
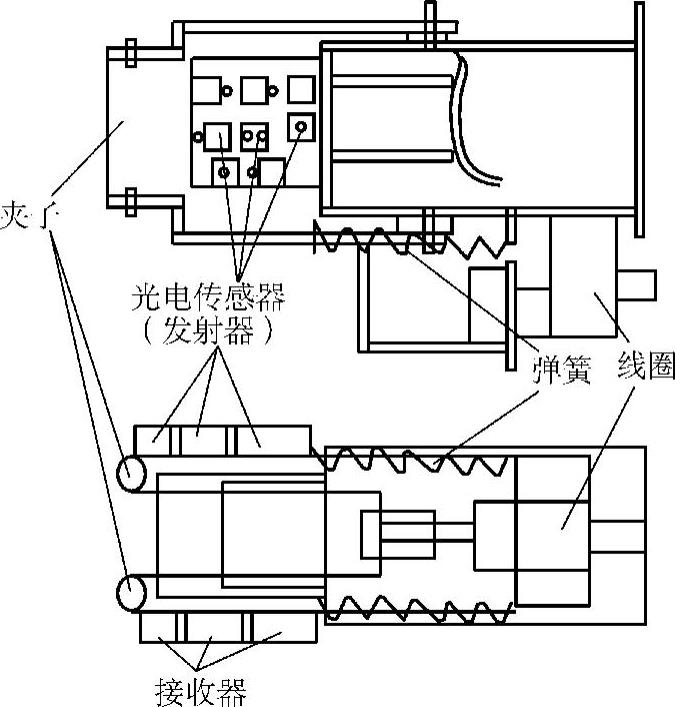
图6-20 收获樱桃番茄的末端执行器
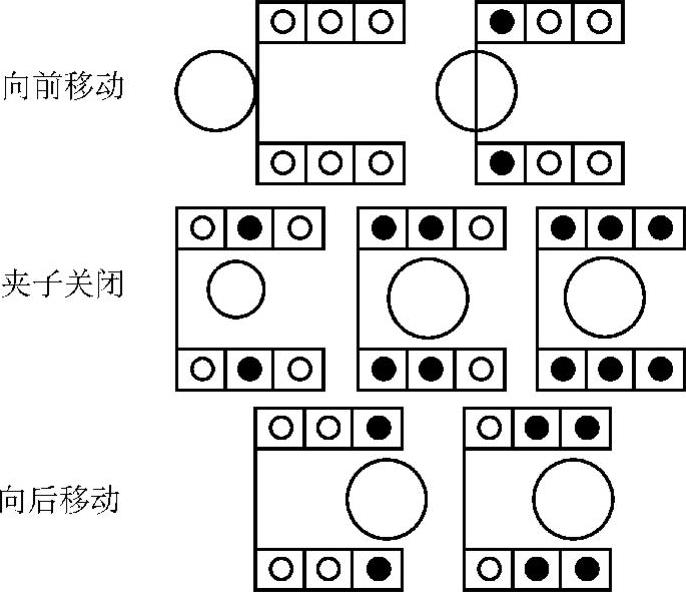
图6-21 光电传感器检测果实的位置
该机器人采用彩色摄像机,分辨率510(H)×490(V),摄像机在水平和垂直方向上移动,可得到果实的两个图像。将彩色图像转换为灰度图像,从而获得果实。
机器人在收获时(见图6-22),首先获得果实的立体图像,经过与R、G、B信号相比,进行筛选、降低噪声、二值化处理等,得到果实的数量,同样也得到果梗的位置。果实的三维位置可以通过X和Z的二维坐标以及Y坐标来确定,Y坐标代表摄像机与果实的距离或深度。判定果实的可接近程度后,末端执行器首先移向果串中左上方的果实,其位置是用X和Z来确定,Y值是果串的中心位置距离。如果接触不到果实,末端执行器沿Y方向向前移动50mm再收获。
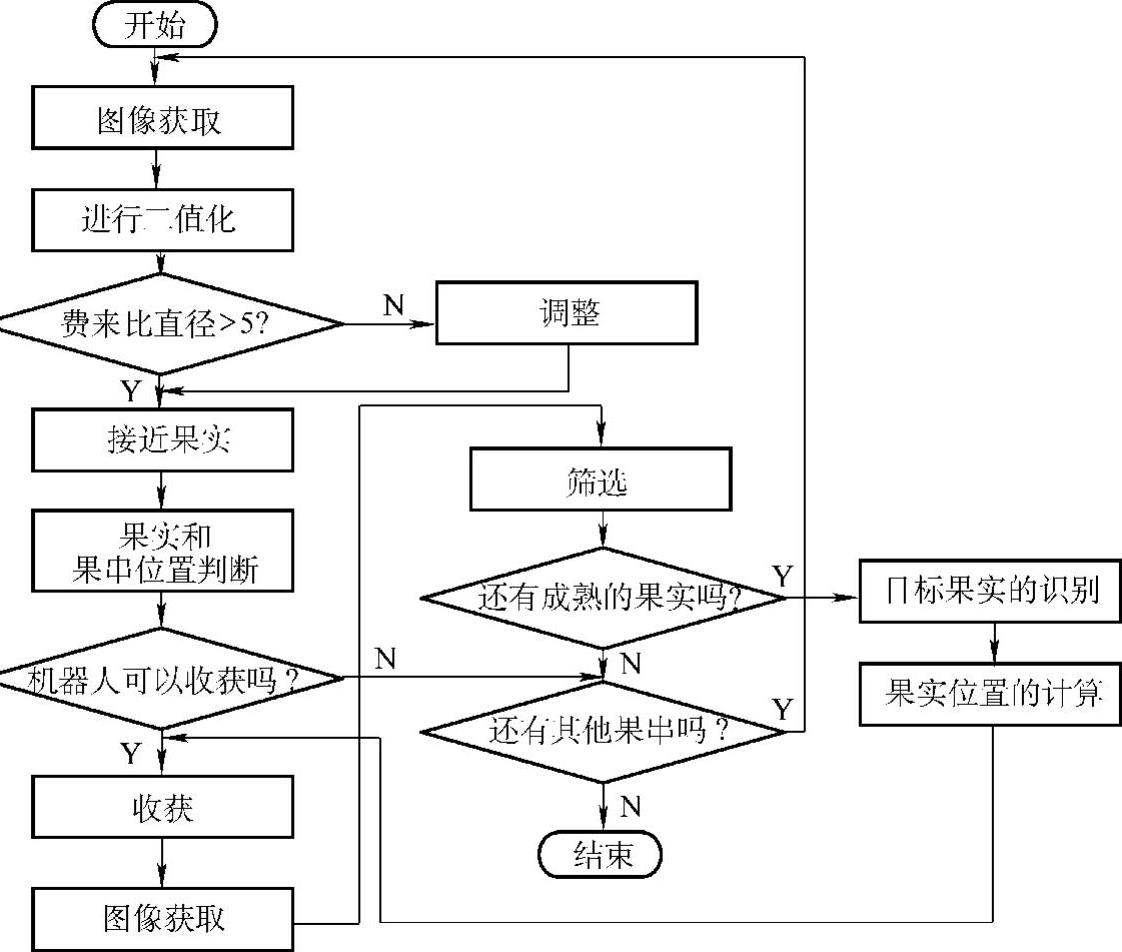
图6-22 樱桃番茄收获机器人的作业流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。