



生物生产机器人(见图6-4)主要包括机械手、末端执行器、传感器、移动机构、控制机构和执行机构六部分。
1.机械手
生物生产系统包含的作物种类、种植模式、生长特点等多种多样,对于不同的作物、不同的种植模式,需要设计不同的机械手进行作业,而对于有些作物,传统的种植模式不能适应机器人的作业要求,需要在保证其正常生长的情况下加以改进。因此,日本学者提出了作物培养系统,作物在经过了培养系统培养后,更适合机器人进行作业,进而提高生产效率和产品质量。例如为了防止高湿度造成的危害,番茄种在田垄的垂直面上,葡萄种在与人身高相近的水平棚架上。
在封闭结构的生物生产系统中,作业结构固定,进行播种、秧苗移栽、嫁接、挤奶、喷药等作业时,要求机械手能够适应这有限的空间。因此,机械手要有合适的自由度。
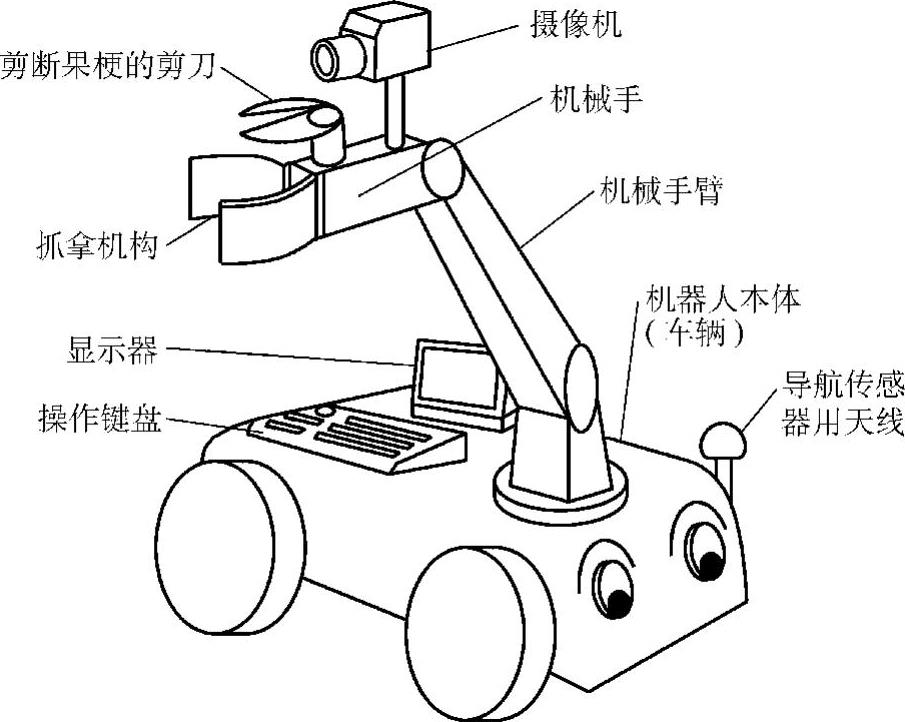
图6-4 一种生物生产机器人
生物生产系统的作业对象是多样的,在设计开发机械手时,不仅要考虑作业对象,还要考虑环境条件和其他作业系统。
2.末端执行器
机器人的末端执行器是安装在机械手前端并直接与作业对象接触的部分。由于它直接接触作业对象,扮演着类似于人手一样的角色,因此,有时也叫做机器人的手或者手爪。但是它的机构又与人手完全不同,它由两个或多个手指组成,手指可以“开”与“合”,实现抓取动作和细微操作。生物生产机器人的末端执行器所处理的对象是多种多样的,如果实、秧苗、子叶、嫩枝、动物等,依据这些对象的特点,可使用手指、吸引垫、针、喷嘴、刀片等进行操作。
同时,末端执行器直接处理作业对象,对对象的市场价值有潜在的影响。因此,要开发末端执行器,首先应该调查了解作业对象的物理特性,如形状、大小、外部组织结构、柔软度等,其次要了解工作对象的生物特性和化学特性等,避免末端执行器在作业时对对象造成伤害。
末端执行器通常由手指、传动机构和驱动机构组成,根据抓取对象和工作条件进行设计。末端执行器除了具有足够的夹持力外,还要保持足够的精度,手指应能顺应被抓取对象的形状。因此,手爪的大小、形状、结构和自由度是机械设计的要点,还要根据作业对象的大小、形状、位姿等几何条件,以及重量、硬度、表面质量等物理条件来综合考虑,同时还要考虑手爪与被抓物体接触后产生的约束和自由度等问题。
3.传感器
机器人传感器按用途分为内部和外部传感器两大类。内部传感器主要用来检测机器人本身状态(如手臂间角度),多为检测位置和角度的传感器;外部传感器主要用来检测机器人所处环境(如是什么物体,离物体的距离有多远等)及状况(如抓取的物体是否滑落),包括物体识别传感器、物体探伤传感器、接近觉传感器、距离传感器、力觉传感器、听觉传感器等。
内部传感器是每个机器人必需的,有些机器人可能不需要外部传感器。不需要外部传感器的机器人,一般来说,其工作环境是固定的,工作对象也是标准化和统一化的。外部传感器广泛应用于生物生产机器人,因为其工作对象的光学特性、形态特性和环境条件特殊且多变。
4.移动机构
生物生产机器人所处理的工作对象是生长在温室或露地的植物,它的作业空间要比工业机器人大,这就需要采用移动机构。因此可以说,移动机构增加了生物生产机器人的自由度。生物生产机器人的移动机构包括轮式移动机构、轨道式移动机构、履带式移动机构、龙门式移动机构和腿式移动机构。
轮式移动机构主要用于机器人工作在温室或露地的两个田垄之间,它的结构简单且易被采用。履带式移动机构适用于大型且重量较大的机器人,并且适用于崎岖不平的路面。轨道式移动机构主要用于既定路径,且容易实现对移动装置的控制。(https://www.xing528.com)
移动机构将机器人从一个地方移到另一个地方,机器人一般在移动机构暂停时进行工作,但也可在移动机构移动时工作。当机器人在移动机构上工作时,移动的机械手使机器人的重心变化,移动机构应通过保持机器人的稳定性,使机器人底座的倾斜程度最小。当移动机构移动到地面上时,应测量或补偿轮胎和土壤之间的滑动。有些移动机构上必须安装感知系统,以确定其在田间的位置和路径。
5.控制机构
机器人由计算机通过一个接口进行控制。计算机中最重要的是中央处理器(CPU),许多其他单元与CPU一起工作,如存储器、外部集成电路、输入/输出端口。这些元件通过地址总线、数据总线和控制总线与CPU相连,从而CPU能发送和接收数据。
6.执行机构
执行机构就是按照电信号的指令,将电动、液压和气压等各种能量转换成旋转运动、直线运动等机械能的机构。
机器人的组成(机械手、末端执行器和移动装置)都与执行机构相关联。用于机器人的执行机构需要满足以下条件:
1)能够承受反复起动、停止、正反转等操作。
2)加速性和分辨率好。
3)小型、轻便、刚度好。
4)可靠性、维护性好。
生物生产机器人多在野外作业,所以执行机构除满足上述条件外,还应适应外界环境的变化,如风沙、阴天等。此外,对于自走式机器人,还要具有一定的安全性,执行机构的驱动力不能太高,其动力源主要有发动机、蓄电池及电缆供电;对于温室内作业的机器人,不能排出废气而影响作物的生长,多采用蓄电池及电缆供电的方式。
执行机构主要分为三类:电动执行机构、液压执行机构和气动执行机构。
电动执行机构主要由电力驱动,因而比较容易控制且结构紧凑。如今,直流伺服电动机、交流伺服电动机和步进电动机广泛应用于生物生产机器人。伺服电动机由闭环系统控制,而步进电动机则由开环系统控制,步进电动机的转角与发动机驱动器的脉冲数成正比。
此外,形状记忆合金有时也会用作机器人末端执行器的执行机构。形状记忆合金具有小型、轻便的优点,可用于生物生产机器人。这种执行机构是通过电流加热,然后通过低温或其他方法冷却来获得运动。但是,这种执行机构的位移和输出功率不大,因而它的反应速度也比其他执行机构慢。
液压执行机构是将液能转换成机械能,输出功率大,能使机器人处理重物。液压缸和液压马达可以进行直线和旋转运动。机器人采用这种执行机构,需要液压泵、泵的动力供应系统、油箱和安全阀等,当然连接执行机构和设备的管道也是必不可少的。
气动执行机构是将压缩空气的能量转变为机械能的机构,可以实现往复运动、摆动、旋转运动或夹持动作。气动执行机构的优点是便于处理简单、轻便的物体。它将空气压力能转换成机械能,但很难实现对机械手、末端执行器或气动泵、管道和阀门等设备的精确定位。气动执行机构可分为气缸、气压马达和摆动马达三类。与液压执行机构相比,气动执行机构适合小型、轻便的物体。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。