



在生物生产系统中,机器人大都是自动处理工作对象。因此,在机器人的设计中,工作对象及其生长过程起着非常重要的作用。生物生产机器人的工作对象涉及植物、动物、微生物和农产品,目前研究比较多的是植物的切除、收获和分类,剪毛、挤奶以及农产品的分级与包装。与传统工业机器人的作业对象和过程相比,生物生产机器人要操纵一个大小、形状、颜色和表面特征多种多样并且变化无常的主体。此外,生物生产机器人可能处在一个非常小的结构环境中,作业受到一定的限制。
植物、动物和食品的形态几乎是无限的,每年都有新品种出现,例如植物有果树、蔬菜、花卉、谷物、杂草等。另外,还有植物组织结构、愈合组织、细胞体胚芽等,所有这些都有独特的和变化的特性,即使是在同样的环境下,同样品种的植物在颜色、形状和大小方面也不一样。各种生长变化阶段的特性,例如在成熟和结实期,也是重点关注的问题。这些都需要开发相应的感应机构来满足需要。
1.生物体的特性
生物对象的特性(见表6-1)可以用多种方法来捕述,基本生物特性包括大小、形状、重量、密度和表面组织,在开发生物生产的机械系统时,通常被作为首选指标。机器视觉技术已经发展到对形态特性进行测定,例如形状、大小的测量。对一个植物的形状的测量,看起来好像很复杂,但它常有一些规律性的特性。例如番茄的叶序有相对的顺序,一个花簇和一片叶子之间的角度大约为90。;同样,对于黄瓜,两片相邻叶子之间的角度大约为144。。茎枝尽管看起来是无序的,但也存在一些规则。这些信息可以作为智能的一部分,来指导机器人用机器视觉辨别植物的形状。
表6-1 生物对象的物理特性

工作对象的动态特性对于确定机器人的工作过程非常重要。一般来说,生物对象相对于工业机器人的工作对象来讲,比较柔软,且更易受到损伤。作用在对象表面的摩擦阻力,对于确定由机器人所产生的抓紧和举起的力是很重要的:切割阻力在正确分开对象时,也是要考虑的因素;当一个机器人对动物进行操作时,更应该仔细,从而避免让动物感觉不舒服;生物对象的伸缩性特点可以确定机器人处理对象的极限值。
生物对象存在一定的光学特性,图6-2表明植物体的一部分在近紫外线、可视线和近红外线区域的典型光谱反射能力。众所周知,植物需要在自然光中摄取一定范围的光进行光合作用(400-700nm波段,大部分是红光和蓝光),并且大部分的叶子反射出绿色的光。由
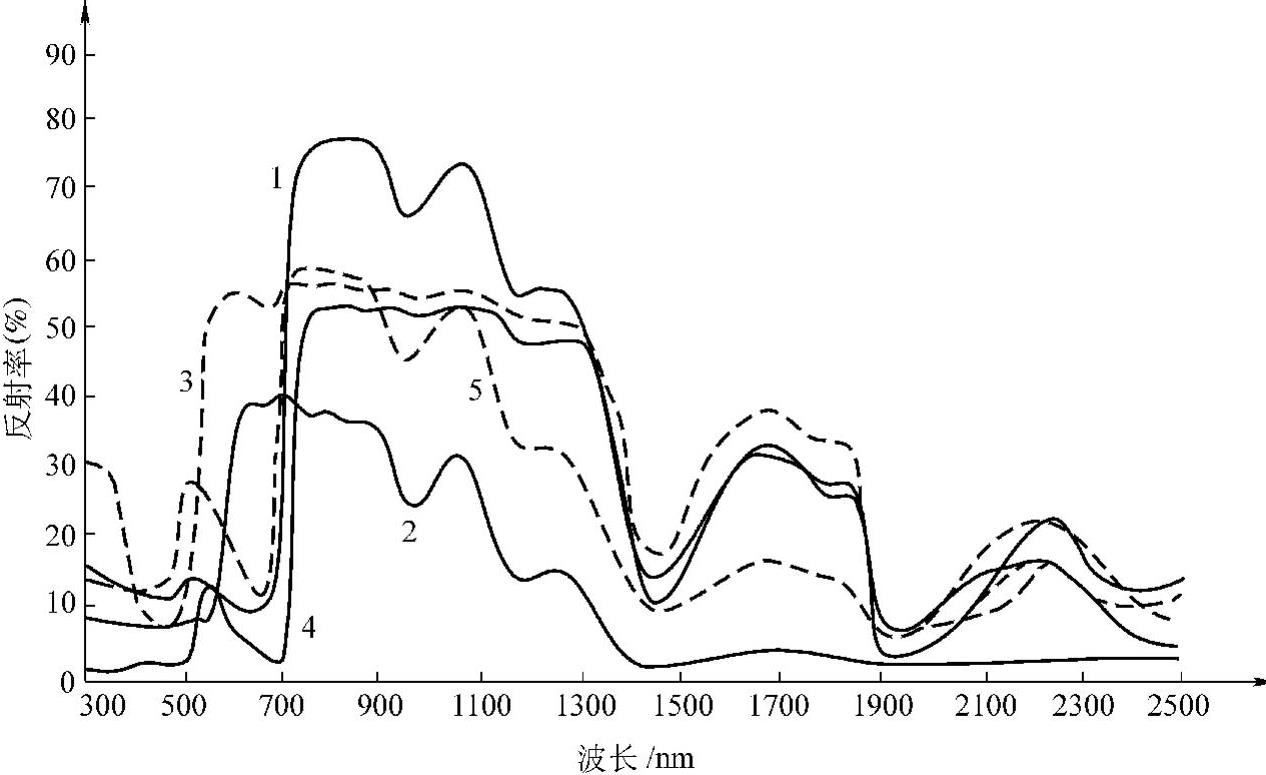
图6-2 植物的典型反射光谱
1-果实l(黄瓜、茄子、苹果、桃、梨、橘子、柿子等) 2-果实2(番茄、葡萄、草莓、胡椒等) 3-花(番茄、黄瓜) 4一叶 5-茎
图6-2可以观测到,有叶绿素的植物体的光吸收段为670nm。果实和花的颜色取决于植物品种,一些花在紫外线区段的反射波段高达300nm,由此可以推断出一些昆虫的视觉感应能力在紫外线范围内,可以将花与植物的其他部分区分开,从而采到花蜜和花粉。
在近红外线区域,水在970nm、1170nm、1450nm、1950nm波长处有许多可吸收带,植物的所有部分在这个区域比在可视区域有更高的反射能力。对叶子和花瓣进行多个层次测定,花瓣和叶子的吸收波长分别是970nm和1170nm,从而在近红外线区域,可以利用这些波长将它们与植物的其他部位分开。
由于生物体含有水和组织,可以采用声波和振动特性来反应部分特征,特征的变化主要取决于主体的成熟度和重量。例如对象的电阻和电容量会随着主体重量的变化而变化。(https://www.xing528.com)
大多数的生物体都是有生命的,已经收获的水果吸进氧气,呼出二氧化碳和乙烯。可以采用生物感觉的方法,通过测定植物或果实的呼吸活动来判断对象的内部状态。
生物生产机器人的作业对象与传统的工业制造机器人是不同的,因而有必要开发生物生产机器人,以适合生物对象的特殊特性。
2.生物生产机器人的特征
要使生物生产机器人适合生物体的特征,生物生产机器人的组成和性能就可能与工业机器人不一样。第一,生物体的属性是各种各样且多变的,因而生物生产机器人在处理生物体时必须是灵活的、多功能的。在大多数情况下,当末端执行器与生物体相接触时,柔性处理是必要的。第二,在识别周围环境时,常希望机器人具有一定程度的智能。第三,机器人常要在非结构化的、苛刻的和变化的环境下作业。第四,除了那些传统机器人所具备的安全装置之外,当生物生产机器人与操作人员一起作业时,可能还需要一些特殊的安全装置。第五,为使机器人能获得潜在的使用者的认可,它的操作界面必须简单、容易掌握,而且必须有较好的经济效益。
3.对生物生产机器人的期望
虽然从19世纪70年代开始,生物生产机器人的研发就在进行,并且取得了可喜的成果,但由于生物生产的多样性,这个领域至今仍被认为是一片热土。
生物生产机器人能弥补季节性劳动力不足和人员安排的困难,降低作业成本。机器人有每天工作多于8h的能力,一些机器人还能一天不间断地工作24h。由于机器人能在任何时间段工作,很多生产系统就可利用这一优点降低非高峰期的使用率。一方面,机器人可用于替代工人完成危险的、脏的作业;另一方面,机器人也适应于对人工出入有较高要求的无菌环境的工作,如许多生物技术。
根据作业的要求,机器人通常安装很多传感器来感知各个方面的信息,对信息进行处理、分析和做出判断,可以执行和完成比人工更精确和更连贯的测量,特别是在像播种、收获和嫁接等单一作业方面,能达到高质量和高一致性,具有较高的市场价值。传感技术采用信号传输信息,对人体没有伤害,并且计算速度和精度高于人类,最后通过微处理器再传递给机器人执行任务。
农业生产的发展随着农业装备技术的提升而提升,农业机械装备提高了农业的生产效率,提高了农业生产抗御自然灾害的能力,形成了新的机械化农业生产系统。同样随着生物生产机器人的发展,生物生产系统中也相应地会产生适应机器人作业的生产系统。
如某个地区的地形包括平原、丘陵、流域、小山、温室和植物工厂,平原地区适宜种植水稻、小麦和其他谷物,高质量的果树应种植在阳光充沛和排水通畅的丘陵,蘑菇适宜遮阴和高湿度条件,温室和植物工厂内可以种植各种蔬菜和花卉。由于各种作物的生产季节不同,在机器人的使用中采用全球定位系统,进行统一的管理和调配,形成新的生产系统,可提高作业质量和生产效率。
生物生产机器人是集工程、生物、社会科学于一体的综合体,它利用许多工程原理和技术来设计生物生产机器人的部件,主要包括机械学、电子学、机器视觉、模糊控制、人工智能和神经网络等。生物生产机器人的研发主要是处理植物、动物、食品和其他生物对象的,因此需要对生物科学进行适当的关注和理解。生物生产机器人还要考虑相关的社会科学,如经济学、管理学、市场学和公共接受程度等(见图6-3)。
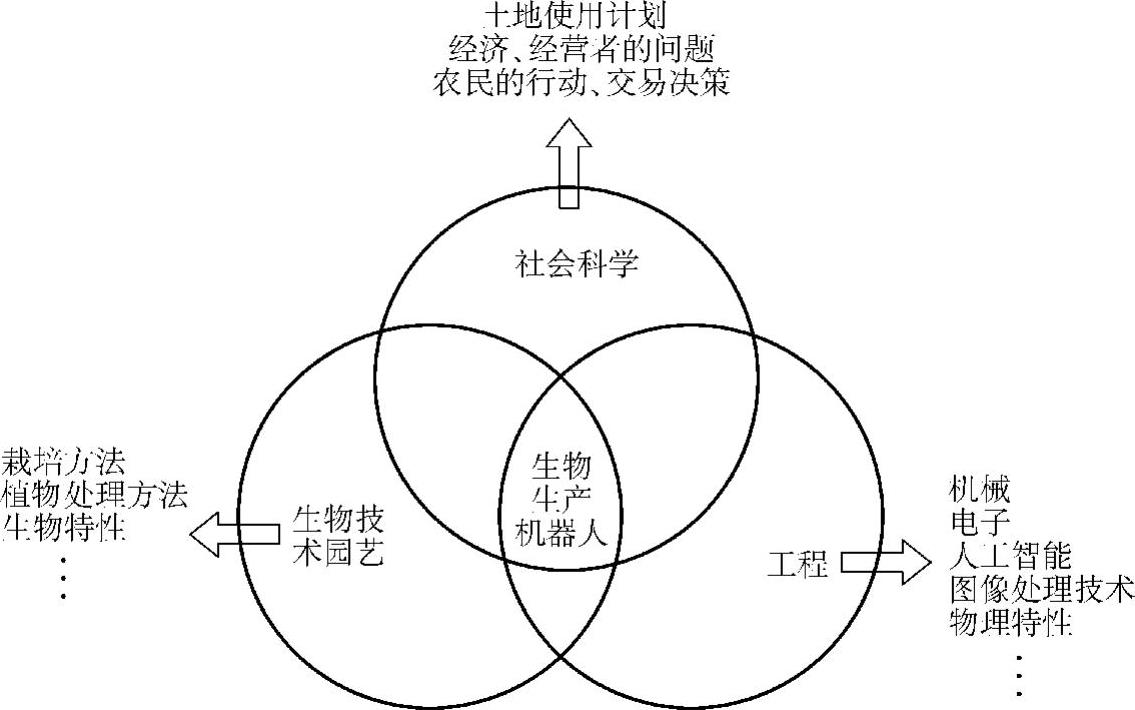
图6-3 生物生产机器人的位置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。