



自古以来,人类便对神秘的宇宙充满着遐想。但是,由于太空环境具有微重力、高真空、温差大、强辐射、照明差等特点,就目前的技术水平来看,宇航员在空间的作业具有较大的危险性,而且耗资也非常巨大。随着空间技术的应用和发展以及空间机器人技术的日益完善,机器人化是实现空间使命安全、低消耗的有效途径。美国国家航空航天局(NASA)指出,到2004年,已超过50%的在轨和行星表面工作通过空间机器人实现。因此,充分发展和利用作为特种机器人技术重要分支的空间机器人,在21世纪人类和平探测和利用太空方面有着广泛而深远的意义。
1.空间机器人的用途
空间机器人是特种机器人的一种,从广义上讲,一切航天器都可以称为空间机器人,如宇宙飞船、航天飞机、人造卫星、空间站等。但航天界对空间机器人的定义一般是指用于开发太空资源、空间建设和维修、协助空间生产和科学实验、星际探索等,带有一定智能的各种机械手、探测小车等应用设备。具体来说,空间机器人主要从事以下几个方面的工作。
(1)空间站的建造 空间机器人可以承担大型空间站中各组成部件的运输及部件间的组装等任务,尤其是在空间站的初期建造阶段,如图5-49所示。无线电天线、太阳电池帆板等大型构件的安装以及大型框架、各舱的组装等舱外活动都离不开空间机器人的协助,如国际空间站(ISS,International Space Station)的建设就离不开空间机器人的密切合作。美国航空航天局(NASA)、欧洲航天局以及俄罗斯、日本、加拿大、巴西等国的航天部门都参加了ISS计划,并不断开发相应的空间机器人,以适应ISS的不同建设阶段。
(2)航天器的维护和修理 随着空间活动的不断发展,人类在太空的财产越来越多,其中大多数是人造卫星。这些卫星发生故障后,如果直接丢弃将造成很大的浪费,必须设法修理后重新发挥它们的作用。由于强烈的宇宙辐射可能危害宇航员的生命,所以只能依靠空间机器人完成这类维修任务,如图5-50所示。空间机器人所进行的维修工作主要包括以下两个方面。
1)回收失灵的卫星。空间机器人将出现故障的卫星从其轨道上带回空间站进行修理,然后再用助推火箭或其他方式将修复后的卫星送回轨道。
2)对故障进行就地修理。有些航天器不能带回空间站进行修理,因为在修理时可能引起爆炸、造成污染或者是航天器体积太大等,这就需要对它们进行就地修理。让宇航员去完成这些修理工作既危险又不经济,而用空间机器人则既保证了安全性又提高了经济效益。
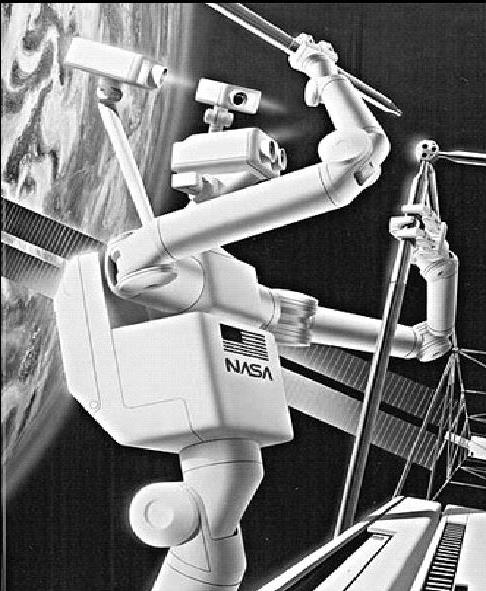
图5-49 建造空间站
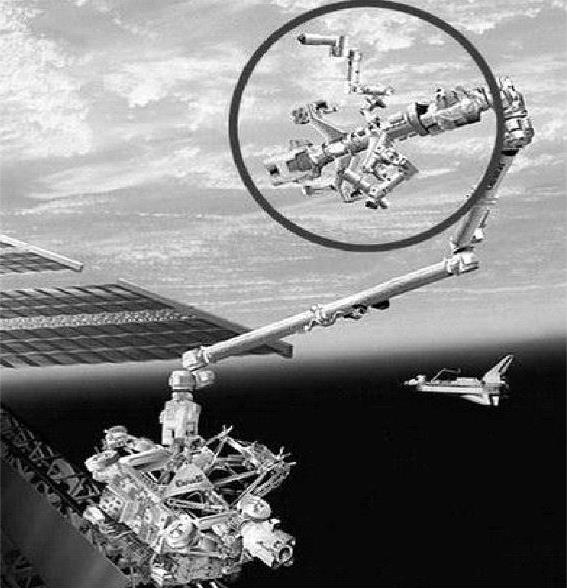
图5-50 人造卫星的维护与修理
(3)空间生产和科学实验 宇宙空间为人类提供了地面上无法实现的微重力和高真空环境,利用这一环境可以生产出地面上难以生产或不能生产的产品,进行地面上不能做的科学实验,例如可以在空间提纯药品,为人类制造治疗疑难病症的救命药。在太空制造的某些药品比在地面上制造的同类药品纯度高5倍,提纯速度快4~8倍。如图5-51所示为欧洲航天局哥伦布舱内部结构。在太空实验室可以进行微重力条件下的生物学、物理、化学及其他学科的研究,如在太空重力条件下生长出的蛋白质比地面条件下更纯净等。如图5-52所示为经过太空改良的南瓜。

图5-51 欧洲航天局哥伦布舱

图5-52 太空南瓜
(4)星球探测 早在1983年,前苏联航天时代的先驱者齐奥尔科夫斯基就曾预言“地球是人类的摇篮,但人类不会永远生活在摇篮里”。为了寻求能源和生存空间,人类将首先冲出大气层进行小心翼翼的探索,再大胆地去利用整个太阳系的宇宙空间。因此,走出地球,探索未来的太空世界,为人类长期的发展寻找新的资源,寻找宇宙中可能存在的人类知音成为航天活动的一个重要目标。空间机器人作为探索其他星球的先行者,可以代替人类对未知星球进行先期勘查,观察星球的气候变化、土壤化学组成、地形地貌等,甚至可以建立机器人前哨基地,进行长期探测,为人类登陆做好准备。
在“阿波罗”计划中,美国就曾多次派遣空间机器人登陆月球,进行实地考察,获得丰富的月球数据之后才有宇航员的成功登陆。1997年,美国国家航空航天局发射的“探路者号”宇宙飞船携带“索杰纳”空间机器人登上火星,开创了星际探索的新纪元。欧洲航天局在2003年实施了“火星快车”(Mars Express)计划。美国国家航空航天局也在2003年发射两个漫游者机器人“勇气号”和“机遇号”到火星进行考察。因此,空间机器人在人类开发和利用空间过程中起着巨大的作用。如图5-53所示为前苏联的月球车1号,如图5-54所示为美国的“阿波罗”月球车。
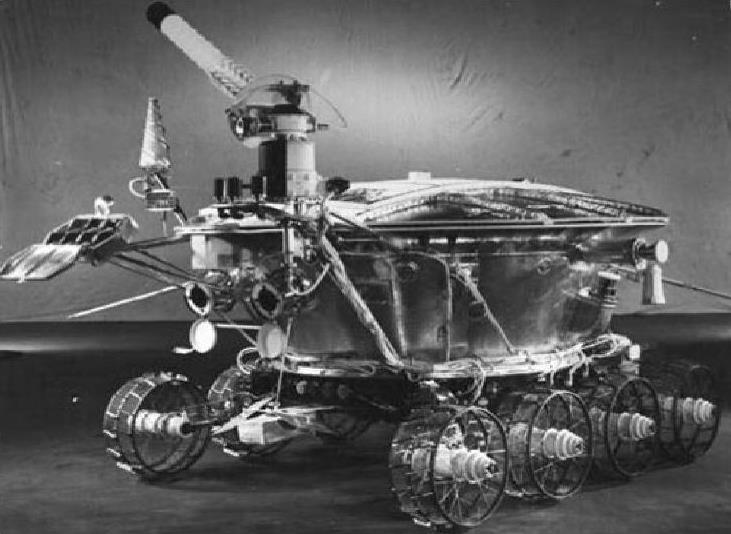
图5-53 前苏联的月球车1号
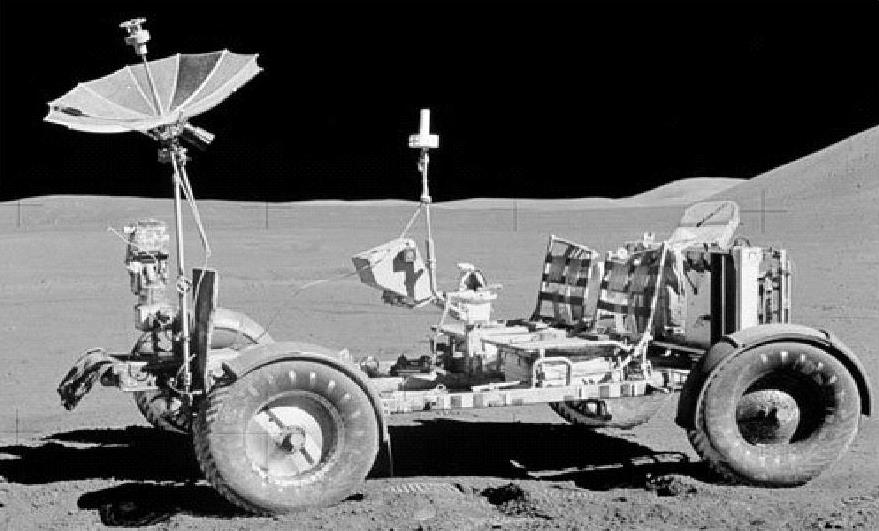
图5-54 美国的“阿波罗”月球车
2.空间军用机器人的特点和分类
(1)空间环境对空间机器人设计的要求 空间机器人因其工作环境的特殊性,其设计要求在很多方面与特种机器人的其他分支,如地面机器人、水下机器人、飞行机器人等有很大不同。
1)高真空对空间机器人设计的要求。空间的真空度高,在近地轨道(LEO)空间的压力为3~10Pa,而在同步轨道(GEQ)空间的压力为5~10Pa。这样的高真空只有特殊挑选的材料才可用,且需特殊的润滑方式,如干润滑等;更适宜无刷直流电动机进行电交换;一些特定的传感原理失效,如超声波探测等。
2)微重力或无重力对空间机器人设计的要求。微重力的环境要求所有的物体都需固定,动力学效应改变,加速度平滑,运动速度极低,起动平滑,机器人关节脆弱,传动效率要求极高。
3)极强辐射对空间机器人设计的要求。在空间站内的辐射总剂量为104Gy/a,并存在质子和重粒子。强辐射使得材料寿命缩短,电子器件需要保护及特殊的硬化技术。
4)距离遥远对空间机器人设计的要求。空间机器人离地面控制站的距离遥远,传输控制指令的通信将发生延迟(称为时延),随空间机器人离地球的远近不同,延迟时间也不相同。地球低轨道卫星服务的通信延迟时间为4~20s,地球低轨道舱内作业的通信延迟时间为10~20s,月球勘探的通信延迟时间为4~8s,火星距地球1.92亿km,无线电信号由火星传到地球需要19.5min。通信延迟包括遥控指令的延迟和遥测信号的延迟,主要由光传播速度造成。时延对空间机器人最大的影响是使连续遥控操作闭环反馈控制系统变得不稳定(在指令反馈控制系统中,由于指令发送的间断性,所以时延不会造成闭环系统的不稳定)。同时在存在时延的情况下,即使操作者完成简单工作,也需要比无时延情况下长得多的时间,这是由于操作者为避免系统不稳定,必须采取“运动-等待”的阶段工作方式。
5)真空温差大对空间机器人设计的要求。在热真空环境下不能利用对流散热,空间站内部的温差为-120~600℃,在月球环境中的温差为-230~1300℃,在火星环境中的温差为-130~200℃。在这样的温差环境中工作的空间机器人,需要多层隔热、带热管的散热器、分布式电加热器、放射性同位素加热单元等技术。
除了以上空间环境对空间机器人设计所提出的要求外,空间机器人还具有以下特点:
1)可靠性和安全性要求高。空间机器人产品质量保证体系要求高,需符合空间系统工程学标准,有内在的、独立于软件和操作程序的安全设计,需非确定性控制方法,要求内嵌分析器,产品容错性好,重要部件要有冗余度。空间机器人中的无人系统可靠性大于80%,与人协作系统可靠性大于95%。
2)机载重量有限且成本昂贵。空间机器人的成本大于每千克20000美元,有的甚至成倍增加。空间机器人的高成本要求应用复合材料的超轻结构设计,有明显弹性的细薄设计,需极高的机载重量/机器人重量比等。
3)机载电源和能量有限。空间机器人需要耗电极低的、高效率电子元器件,计算机相关配置有限,如处理器、内存等的限制。
(2)空间机器人的分类 空间机器人分类的依据不同,其分类方法也不同。空间机器人通常可以按照以下的方法来划分。
1)根据空间机器人所处的位置来划分
①低轨道空间机器人:离地面300~500km高的地球旋转轨道。
②静止轨道空间机器人:离地面约36000km高的静止卫星用轨道。
③月球空间机器人:在月球表面进行勘探工作。(https://www.xing528.com)
④行星空间机器人:主要指对火星、金星、木星等行星进行探测。
2)根据航天飞机舱内外来划分
①舱内活动机器人。
②舱外活动机器人。
3)根据人的操纵位置来划分
①地上操纵机器人:从地面站控制操作。
②舱内操纵机器人:从航天飞机内部通过直视或操作台进行控制操作。
③舱外操纵机器人:舱外控制操作。
4)根据功能和形式来划分
①自由飞行空间机器人。
②机器人卫星。
③空间实验用机器人。
④火星勘探机器人。
⑤行星勘探机器人。
5)根据空间机器人的应用来划分
①卫星服务空间机器人。
②空间站服务空间机器人。
③实验性空间机器人。
④行星表面探测空间机器人。
6)根据控制方式来划分
①主从式遥控机械手。
②遥控机器人。
③自主机器人。
3.空间机器人实例
(1)火星车 美国国家航空航天局的JPL实验室多年来一直从事空间机器人系统和智能手爪的研究,并执行遥控机器人技术计划。JPL实验室研制了闻名世界的“索杰纳”火星车(见图2-31)。美国国家航空航天局在2003年发射了“勇气号”和“机遇号”火星探测空间机器人(见图5-55)。两个孪生的空间机器人(结构完全相同)的主要任务是寻找和定性大量的岩石和土壤,那些岩石和土壤可能隐藏着火星过去水的活动线索。
美国的“好奇(Curiosity)号”火星车如图5-56所示。它比“勇气号”和“机遇号”的目标更加远大,尽管它比后者更重、更加复杂,但是它的速度可以达到90m/h。“好奇号”火星车的工作时间有望持续至少一个火星年,即686天,其中包括火星冬季,并要运行多达20km。

图5-55 “勇气号”火星探测空间机器人
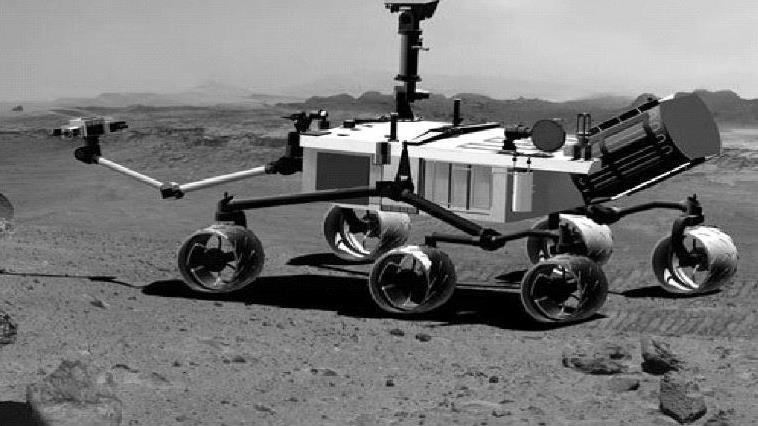
图5-56 “好奇号”火星车
(2)加拿大臂2号“加拿大臂2号”机器人系统在空间站日常维护和修理中起着相当关键的作用,如图5-57所示。依靠这只手臂,空间站上的设备及补给可以顺利地从一处转移到另一处。此外,当宇航员进行舱外作业,如修理及更换各种空间站设备时,也都离不开它的帮助。
(3)欧洲空间机器人 欧洲太空局各国相继成立空间机器人研究机构,如德国的DFV-LR公司、法国的MATRA ESP ACE公司、意大利的TECNO SPAZIO公司等,这些公司专门从事机器人的研究工作。德国于1993年由“哥伦比亚号”航天飞机携带发射升空的罗泰克斯(ROTEX)空间机器人是世界上第一个远距离遥控空间机器人。罗泰克斯机器人装有一只具有力传感器、光学敏感器的智能手爪,它成功地完成以下试验:空间站的构造、替换空间站上的可更换零件、捕捉自由浮游卫星。罗泰克斯空间机器人采用两种遥控方式,一种是近距离遥控方式,宇航员在舱内遥控搭载在飞行器上的机械手;另一种是操作员在地面通过监控台进行远距离遥控,同时利用图形预显示技术成功地解决了时间延迟问题。罗泰克斯空间机器人还利用虚拟现实技术,为操作员提供良好的人机接口。预计2018年发射升空的欧洲火星车(ExoMars)探测器,计划前往火星寻找过去或现在的生命迹象,如图5-58所示。

图5-57 “加拿大臂2号”机器人
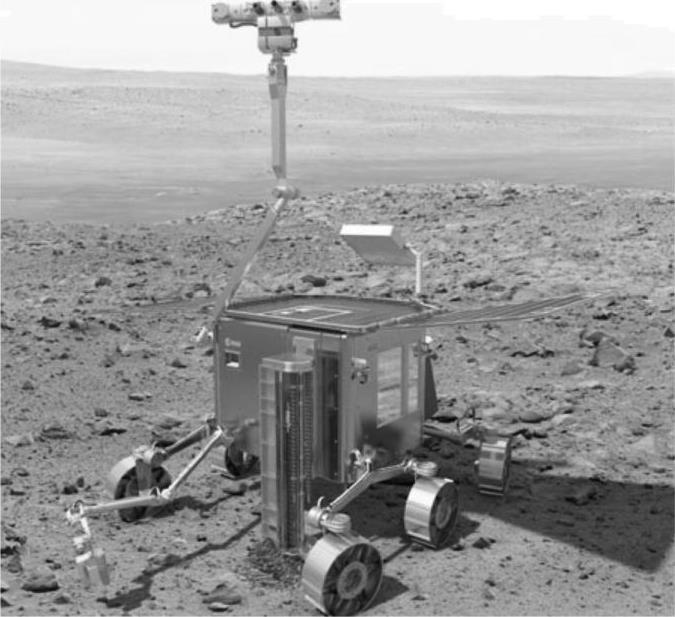
图5-58 欧洲火星车探测器
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。