



无人机(UAV)是最新一代无人驾驶飞机的简称。近年来,在军用机器人家族中,无人机是科研活动最活跃、技术进步最大、研究及采购经费投入最多、实战经验最丰富的领域。80多年来,世界无人机的发展基本上是以美国为主线向前推进的,无论是从无人机的技术水平还是种类和数量来看,美国均居世界首位。
1990年,美国佐治亚理工大学罗伯特·迈克森教授提出了空中机器人(Aerial Robotics)的概念。他认为,无人机本质上是各种能在空中自主飞行的飞行器,它本身就是一种特殊的机器人。和地面机器人相比,它会飞,却不具人形;而与无人飞机相比,它又和机器人一样,有自己的眼和脑,能自主控制自己的行动。所以,空中机器人是指具有较高自主水平,能够在空中自主飞行并执行任务的飞行器,包括固定翼无人飞行器、旋翼无人飞行器和无人飞艇等。空中机器人可以在地面站的监控下自主完成多种飞行任务,在搜索救援、环境检测、交通监察、空中拍摄和电力巡查等领域有广泛的用途。空中机器人拓展了无人机的概念,在一定意义上可将其看做是无人机的别称。
空中机器人是一项系统工程,涉及航空理论、计算机、控制、电子、机械、材料和系统工程等多个学科。在具体的问题中,又涉及飞行器的设计与制作、控制系统和算法的设计、传感器应用与融合、导航制导、数据通信、图像识别和信号处理等多方面的知识。
1.无人机的系统组成及特点
无人机是具有自主程序控制、可进行无线遥控飞行的空中飞行器,可与遥控人员协作完成半自主控制,也可在无人驾驶、控制的状态下自主操作。无人机设计灵巧、空间利用率高、可重复使用,实际用途十分广泛。
(1)无人机系统组成 无人机主要包括飞机机体、飞控系统、数据链系统、发射回收系统、电源系统等。飞控系统又称为飞行管理与控制系统,相当于无人机系统的“心脏”部分,对无人机的稳定性、数据传输的可靠性、精确度、实时性等都有重要影响,对其飞行性能起决定性的作用;数据链系统可以保证对遥控指令的准确传输,以及无人机接收、发送信息的实时性和可靠性,以保证信息反馈的及时有效性和顺利、准确地完成任务;发射回收系统保证无人机顺利升空以达到安全的高度和速度飞行,并在执行完任务后安全回落到地面。无人机系统的组成框图如图5-37所示。
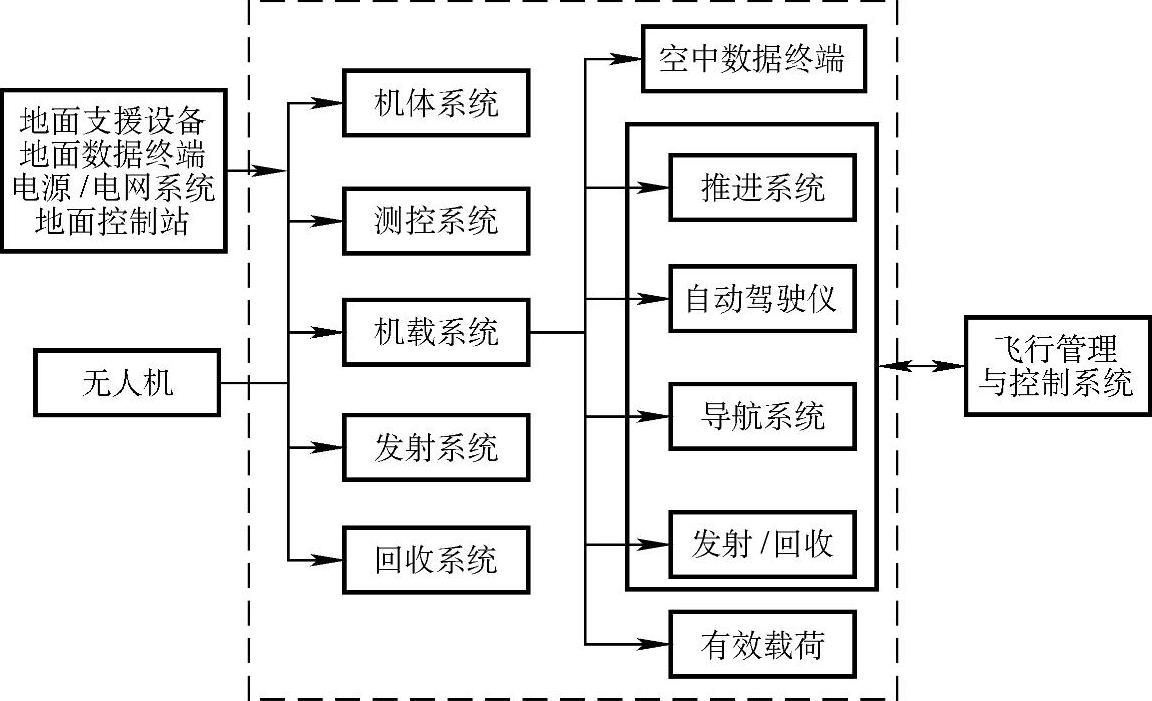
图5-37 无人机系统的组成框图
(2)无人机系统特点
1)机体灵活性好,体积小、重量轻。由于无人机的设计不用考虑驾驶员的部分,机身可以设计得很小,同时使用较轻的材料以减轻机身重量,提高生存能力和飞行速度。
2)可担负多载荷任务并进行远距离、长时间续航。与相同体积和重量的有人机相比,无人机有更多的空间和载重量来承载燃料、武器和设备等,提高了工作效率,延长了续航时间;同时,不用考虑飞行员自身的承受极限和飞行加速度的影响,可执行更复杂的飞行任务。
3)隐身性能好,生存能力强,费用低廉。与载重量相当的有人机相比,无人机造型小巧,机体灵活,可采用雷达反射特征不敏感的材料制造,以达到较好的隐身效果,从而躲避探测。目前,大部分中小型无人机的价格已降至有人机的1/10左右,而小型无人机更是价格低廉。
4)安全系数高,自主控制能力强。无人机最大的特点就是机上无人驾驶,使其可以担负许多有人机无法执行的特殊、危险且艰巨的任务,如核污染区的勘测、生化危险区的工作以及新武器试验等,既扩大了执行任务范围,又减少了不必要的人员伤亡,增强了安全可靠性。无人机具有极强的自主控制能力,可以在地面站的操作人员控制下进行遥控飞行,也可根据预编程序进行自主控制飞行,同时能与指挥中心进行实时通信。
2.无人机关键技术
(1)隐身技术 隐身技术的应用对提高无人机的生存能力具有至关重要的作用。无人机主要通过对机身表面材料的改进和对机体构造的设计来降低雷达信号的反射。通常,无人机机体表面采用降低反射雷达信号波能量的复合材料构造或使用雷达吸波材料。雷达散射断面积(Radar Cross-Section,RCS)越小,目标向雷达接收方散射电磁波的能力就越弱,目标的生存性能就越好。同时,无人机也尽量采用减小电磁波反射的机身构造,即在机身各部分的连接处进行光滑处理,避免形成角度增强反射,并在凹口处采取相应的隐身措施。
(2)飞控技术 飞控技术包括传感技术、导航定位技术、飞行控制规律设计等。随着任务的不同,如侦察、运输等,无人机控制规律各不相同,尤其是一机多用时,无人机的控制任务也要随之改变,这就对飞行控制提出了更高要求,飞行控制规律的设计成为难点。飞行控制规律是解决无人机的核心系统与已建立的对象模型及各传感器间匹配的控制规律。目前,多模型的方法是处理不确定问题的重要方法,多模型的自适应控制技术是比较适合的。将设计模型与在线识别和决策相结合,可根据情况的变化自主地在已建立的模型上集中选择适合当前工作状态的模型及与之匹配的控制器,形成实时的、具有高鲁棒性的控制系统,降低决策和控制的复杂程度,使总体性能达到最佳。
(3)动力技术 由于无人机具有承载任务多、续航时间长的特点,在无人机飞行过程中就需要有较好的动力推动技术和低油耗、高可靠性的发动机。当前,无人机使用的发动机主要有活塞式、涡轮式、转子式、太阳能式发动机等。其中,太阳能式发动机能有效利用能源,满足无人机的长滞空需要,前景广阔。
(4)数据链技术 无人机要实现智能的自主控制飞行,最关键的技术是数据链传输的安全和可靠技术。宽带、大数据量的传输是无人机的发展趋势和必然要求。目前,无人机主要采用Ku/Ka波段、C/X波段和L波段进行通信。
(5)发射、回收技术 发射系统按其发射点位置来分,主要包括陆(或雪、冰)上发射、水(舰)上发射和空中发射。陆上发射根据发射方式可分为发射架发射、起落架起飞、滑跑车起飞和垂直起飞等。空中发射主要是指母机投放,即由母机运载到空中指定位置后进行点火投放,以提高无人机的使用寿命,降低伤亡率,但对母机的设计要求较高,同时应用的环境较受限制。
回收按回收地点可分为空中回收、陆上回收、水上或舰上回收;按回收方式可分为自主降落回收和遥控降落回收;按回收系统可分为回收网回收、伞降回收、滑跑降落回收(起落架回收)等。其中,自主降落回收要求在飞机控制系统中加入返航、降落、定位等程序,设计复杂但操作使用简单,应用较广泛。
(6)自主加油技术 自主加油能力的研究工作已经取得重大进展。加油过程中,无人机靠近加油机,使用不同传感器将输油管插入加油机油箱当中。无人机利用新开发的光学探针,成功探测到加油机锥套的位置。
3.无人机实例
(1)固定翼无人侦察机 美国“捕食者”无人侦察机是实用型合成孔径雷达的无人侦察机。该机最大速度为240km/h,活动半径为925km,装备有先进的电/红外传感器、可见光摄像机2台,红外摄像机1台,激光测距仪1台,作用距离10km,外形如图5-38所示。其主要特点是:续航时间长,可达24h以上;操作简单,便于运输,维修性好;隐身效果好,雷达反射断面积仅为1m2,加上雷达波材料后,其信号特征可减少到0.1m2,体积小、声音小;侦察范围较大,分辨率高。主要不足是侦察效率受气象和能见度影响大,数据传输技术有待改进,只能传送静止图像。
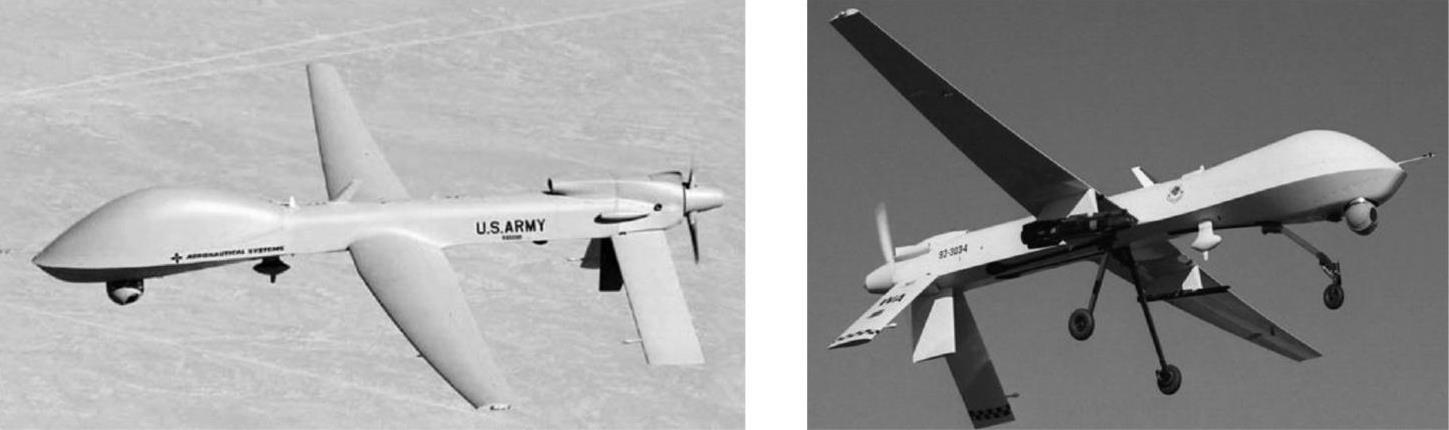
图5-38 美国“捕食者”无人侦察机
美国“全球鹰”无人机是一种高空高速长航时无人侦察机,主要用于大范围的连续侦察与监视,如图5-39所示。该机长13.4m,翼展35.5m,最大起飞重量为11610kg,最大载油量为6577kg,有效载荷为900kg。它有一台涡扇发动机置于机身上方,最大飞行速度为740km/h,巡航速度为635km/h,航程为26000km,续航时间为42h。机上载有合成孔径雷达、电视摄像机、红外探测器三种侦察设备,以及防御性电子对抗装备和数字通信设备。
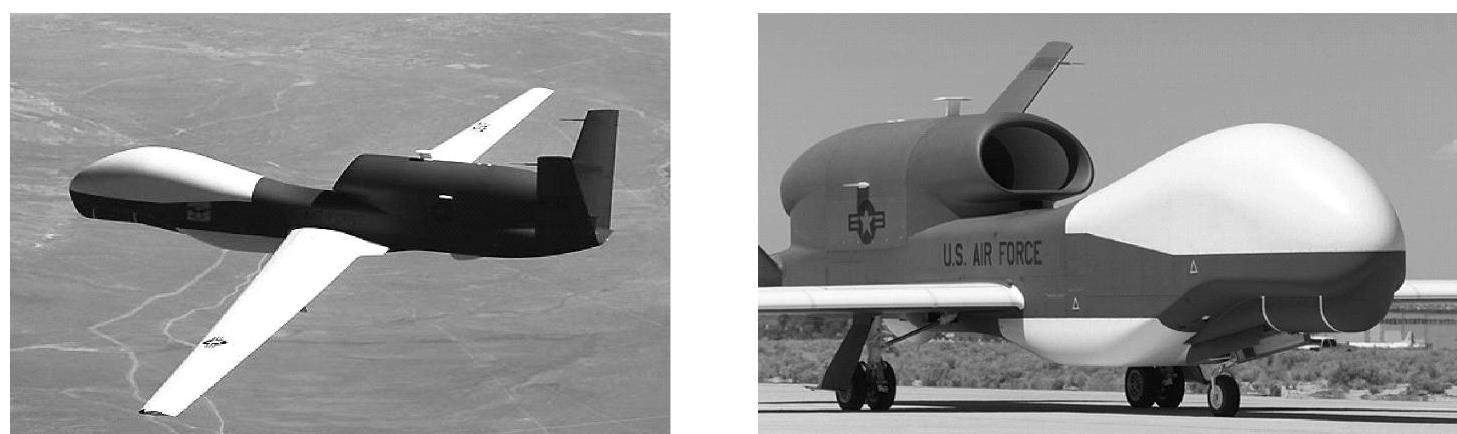
图5-39 美国“全球鹰”无人侦察机
以色列“苍鹭”无人机(见图5-40)的翼展为16.6m,每次升空均能以225km/h的速度在9000m高空持续飞行30h,“苍鹭”无人机侦察精度超过了以往的其他侦察机,它能分辨出地面上的人。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-40 以色列“苍鹭”无人机
a)“苍鹭-1”型 b)“苍鹭-2”型
“不死鸟”无人机(见图5-41)是由英国马可尼公司研制的一种中程无人侦察机。机体全部采用复合材料,具有模块式结构,推进式机翼和尾梁,可置换的机翼、垂尾翼尖等。该机的隐身性能好,具有较高的生存力,易于维修和运输;最大使用高度为2440m,侦察半径为60km,在1000m高度下视场达800km,装备有先进的红外传感器、合成孔径雷达和电子战系统。
中国“翔龙”无人侦察机(见图5-42)全长14.33m,翼展24.86m,机高5.413m,正常起飞时重量为6800kg,任务载荷为600kg,机体寿命暂定为2500飞行小时。该机巡航高度为18000~20000m,巡航速度大于700km/h;侦察半径为2000~2500km,续航时间最大为10h,起飞滑跑距离为350m,着陆滑跑距离500m。
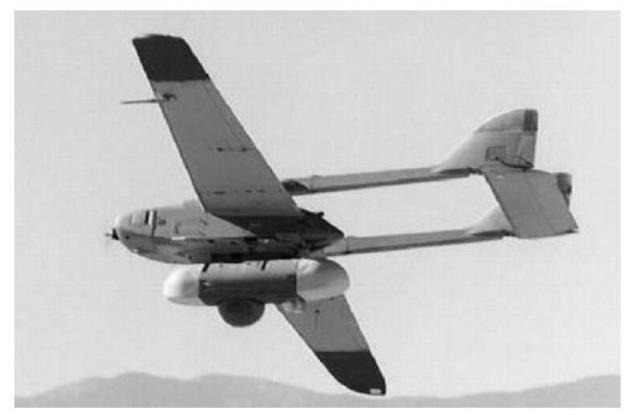
图5-41 英国“不死鸟”无人侦察机

图5-42 中国“翔龙”无人侦察机
(2)旋翼无人直升机 与固定翼无人机相比,旋翼无人直升机可垂直起降、空中悬停,朝任意方向飞行,其起飞着陆场地小,不必配备像固定翼无人机那样复杂、大体积的发射回收系统。旋翼无人直升机大致可分成三类:常规单旋翼式、共轴反转双旋翼式、非常规双旋翼式。
RQ-8A“火力侦察兵”无人直升机是美国诺思罗普·格鲁门公司瑞恩航空中心研制的下一代舰载垂直起降战术无人直升机(VTUAV),用于执行侦查和瞄准任务,如图5-43所示。RQ-8B无人直升机采用四桨叶,其续航及载荷能力较RQ-8A型无人直升机都有很大的提高,加装了光电/红外传感器、合成孔径雷达以及激光测距仪等,如图5-44所示。

图5-43 RQ-8A无人直升机

图5-44 RQ-8B无人直升机
1989年,日本雅马哈公司发售了世界上第一种产业用R-50无人直升机;1997年,发售了性能极大改善的RMAX无人直升机,厂家型号为L15;2002年,发售了性能进一步提高的RMAX TypeⅡG无人直升机,它具有更强的操作性和稳定性。这些直升机主要用于农业领域。
雅马哈公司自主飞行产业用RMAX G1无人直升机如图5-45所示,它采用YACS(姿态控制装置)和RTK-DGPS(差分GPS)系统作为控制核心,能够按照预先设定的程序自动飞行,进行很多手控操作无法完成的飞行动作和任务;可在目视范围以外进行远距离飞行,准确地飞行到指定位置完成任务并可自动返航;系统具有很高的稳定性和安全性。根据需要,该直升机可搭载不同的任务设备,如CCD摄像机、红外摄像机、激光扫描装置等,配合多种应用软件,完成多种全方位的监视及测量任务。RMAX G1无人直升机的旋翼直径为3m,最大起飞重量为88kg,有效载荷为30kg,飞行速度为20km/h,续航时间为1h。
奥地利Schiebel公司于20世纪90年代开始研究无人直升机探雷技术。20世纪90年代中期,推出CAMCOPTER 5.0无人直升机,从探雷逐渐拓展到空中光电探测等军事用途。2003年,研制成功S-100无人直升机。S-100无人直升机的最大起飞重量为200kg,任务载荷为50kg,续航时间为4h,如图5-46所示。

图5-45 RMAX G1无人直升机

图5-46 Schiebel公司的S-100无人直升机
加拿大的“海上哨兵”CL-327无人直升机是目前世界上唯一一种已经批量生产的舰载垂直起降无人直升机,如图5-47所示。它由CL-227无人直升机改进而来,采用双旋翼结构和花生形机体,由上部动力组件、中部旋翼组件和下部有效载荷组件组成。与CL-227无人直升机不同的是,CL-327无人直升机增大了旋翼直径(达到4m),改进了传动系统,并加大了载荷舱,最大起飞重量达350kg。
CL-327无人直升机的最大特点是不用火箭发射及回收网回收,可在护卫舰上起降。目前,它的飞行高度已超过5500m,巡航速度达到180km/h,续航时间为6h,有效载荷达到了100kg,数据传输系统采用定向天线,传输距离达到了180km。另外,其侦察传感器采用前视红外传感器,还装了一部识别器。

图5-47 CL-327无人直升机
KA-137无人直升机是俄罗斯研制的一种多用途无人直升机,KA-137无人直升机可携带最大80kg的有效载荷,主要用于生态监测、油气管道监测、森林防火、辐射和生化侦察、自然灾害监测、公安边防巡逻、渔场保护等。其机体形状为球形,并采用四腿起落架。
KA-137无人直升机的机体分成上、下两个独立的部分,上半部分装载发动机、燃油及控制系统;下半部分放置有效载荷和各种传感器,如图5-48所示。该机装有一套自动飞行的数字控制系统,机载惯性卫星导航系统确保它能够完成许多复杂的自动飞行任务。KA-137无人直升机的特点如下:可完全自主飞行;可舰船操作,机体防腐蚀,电磁屏蔽;可装载电视摄像机、红外摄像机、便携式雷达和无线电发射机;可重组多任务传感器,卫星导航,数字自动驾驶仪,自动导航在60m的精度之内;可防高强度辐射。

图5-48 俄罗斯KA-137无人直升机
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。