



对于特种机器人的体系结构,布鲁克斯(Brooks)提出的包容体系结构是最有名的基于行为的控制体系结构。在基于行为的控制系统中,直接从传感器的感知数据计算得出特种机器人的动作,系统由一组并行运行的行为组成,每个行为知道如何对环境中的事件和状态做出反应。每个行为只需接收检测到的事件和状态所需要的传感器数据,并推算出相应的响应,从而将传感器数据处理减到最少。此外,每个行为直接向执行机构发送命令,在任一时刻通过协调行为选择控制特种机器人所需要的行为来执行任务。这种类型的控制系统最明显的优点是在环境空间中运行时,能够及时地对环境中不可预测的事件做出反应。基于行为体系结构的一个重要特点是只需少量的内存和简单的表示。它没有世界模型,系统模块之间信息流的表示也很简单。因为没有表示之间复杂的变换,也不需要刷新复杂的模型,这些特点有利于提高系统的快速反应性。
在布鲁克斯提出的包容体系结构中,由一组相互发送信息的小模块建立一个控制层。每个模块是一个具有扩张的寄存器和定时器的有限状态机。多个模块协作生成一个行为,每个具有高水平的层定义一类更为复杂的特定行为。控制层可以检查来自低水平层的数据,并将数据输入低水平层,抑制正常的数据流。“包容体系结构”这个名称就来自一个控制层包容低水平层任务的特性。
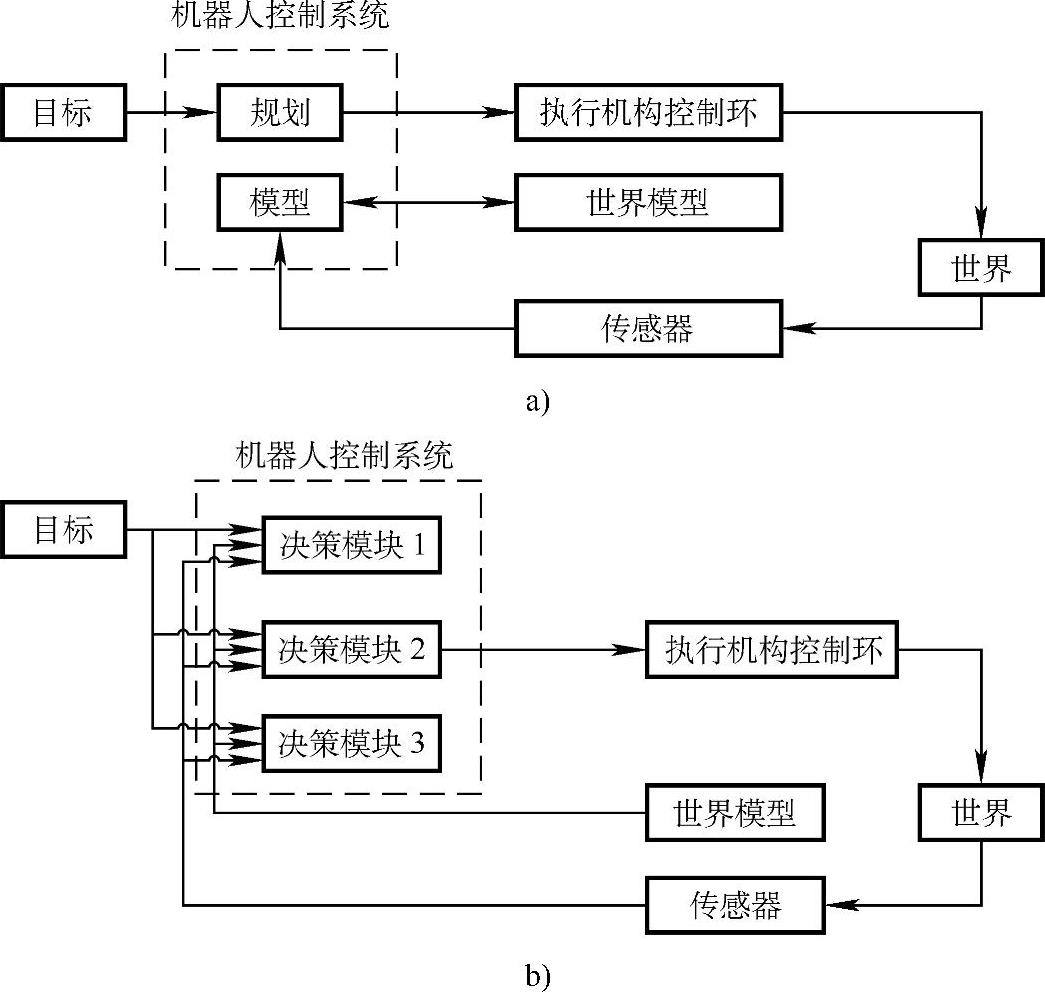
图5-1 传统的和基于行为的特种机器人控制体系结构(https://www.xing528.com)
a)传统方法 b)行为方法
基于行为的体系结构和传统的机器人体系结构不同,后者在规划和执行动作之前包括复杂的环境模型,而前者的动作在传感器的数据到达后能够迅速地被执行。基于行为的体系结构不同于传统方法的另一个重要方面是:一个行为体系结构有一个分层排序的动作规则流程(见图5-1),然而传统的体系结构有一个单一的“感知—动作”处理流程。动作规则定义为以传感器数据和世界模型信息为基础的决策规则。决策规则集和传感器信息处理并行计算和推理。连接感知和动作的规则称为行为,根据行为的重要程度对它们进行分层排序。
包容体系能够通过不断地增加层来建立复杂的控制系统,只要第一层即最底层已经完成,控制系统就能正常工作,且模块之间传送信息的表示非常简单。在基于行为体系结构的控制系统编程的行为语言中,在行为之间没有共享的数据结构,而且保持信息的寄存器通常不超过8位数据宽度,甚至在一些具体的实现中每个数据位都被使用。因为不需要表示之间的复杂交换,没有执行耗时的模型更新和基于模型的规划运算,增强了系统的快速反应性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。