



1.多传感器融合技术
系统中使用的传感器种类和数量越来越多,每种传感器都有一定的使用条件和感知范围,并且又能给出环境或对象的部分或整个侧面的信息。为了有效地利用这些传感器信息需要采用某种形式对传感器信息进行综合、融合处理,不同类型信息的多种形式的处理系统就是传感器融合。
传感器融合技术涉及神经网络、知识工程、模糊理论、检测和控制领域的新理论和新方法。传感器的融合类型有多种,现举两个例子。
①竞争性的。在传感器检测同一环境或同一物体的同一性质时,传感器提供的数据可能是一致的,也可以是矛盾的。如有矛盾,就需要系统裁决。裁决的方法有多种,如加权平均法、决策法等。在一个导航系统中,车辆位置的确定可以通过计算法定位系统(利用速度、方向等记录数据进行计算)或路标(如交叉路口、人行道等参照物)观察来确定。若路标观测成功,则用路标观测的结果,并对计算法的值进行修正,否则利用计算法所得的结果。
②互补性的。传感器提供不同形式的数据,例如识别三维物体的任务,就说明类型的融合。利用彩色摄像机和激光测距仪确定一段阶梯道路,彩色摄像机提供图像(如颜色、特征),而激光测距仪提供距离信息,两者融合即可得到三维信息。
目前,要使多传感器信息融合体系化尚有困难,而且缺乏理论依据。多传感器融合的理想目标应是人类的感觉、识别、控制体系,但由于对后者尚无一个明确的工程学的阐述,所以机器人传感器融合体系要具备什么样的功能尚是一个模糊的概念。相信随着机器人智能水平的提高,多传感器融合理论和技术将会逐步完善和系统化。
2.多传感器融合应用实例
下面介绍日本东海大学研制的营救机器人手爪传感系统。
(1)营救机器人的系统结构 营救机器人的系统结构如图4-50所示,传感器控制系统的5个功能模块如下:
①机器人手臂模块。为避免伤害到人的身体,模块采用小功率的五自由度工业机器人机器人臂是具有直流电动机和编码器的伺服系统。
②机器人手爪模块。手爪具有两个关节的平面型手指,用来抓住人的手臂,手爪具有自适应抓取的功能。
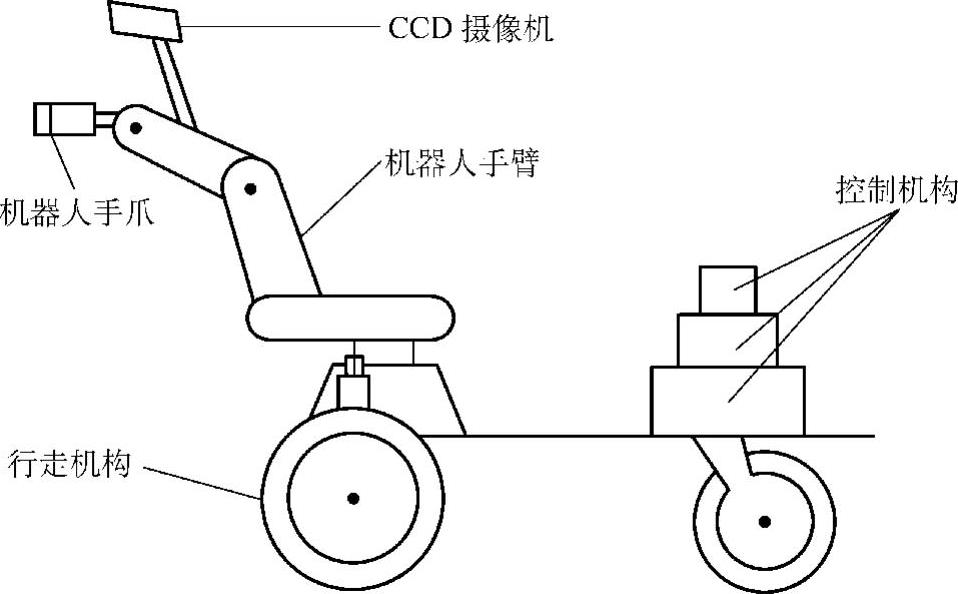
图4-50 营救机器人的系统结构
③传感器与信息处理模块。机器人手爪具有3种传感器:阵列式触觉传感器、六维力/力矩传感器和滑觉传感器,还有两个用于远距离测量和监控的视觉传感器——CCD摄像机。
④运动机构模块。机构为四轮结构,其中两个由电动机驱动。
⑤系统控制模块。系统控制模块使用了两台计算机,1台用于机器人控制,另1台用于传感器信息融合处理。
(2)手爪传感器 营救机器人手爪及其传感器分布如图4-51所示,在手爪上集成了力/力矩传感器、触觉阵列传感器和滑觉传感器。(https://www.xing528.com)
①分布式触觉传感器。作为机器人的手指,首先,分布式(阵列)触觉传感器检测接触压力及其分布。营救机器人手爪采用压力敏感橡胶和条状胶片电极构成的触觉阵列传感器,用来控制处理不规则物体的夹持力。条状胶片电极只用一面,共有16根,8根作为地线,其余8根作为信号线,这样在每个手指部位可以检测连续接触电压。为了检测一个平面的平衡压力,这种线传感器在第一个指节上沿纵向布置,而在第二个指节上沿横向布置。在手掌底部内表面也布置了条状触觉传感器阵列。
接触力首先转换为导电橡胶的电阻,通过测量电压降检测接触力。所有电极数据通过I/O接口送往处理器。
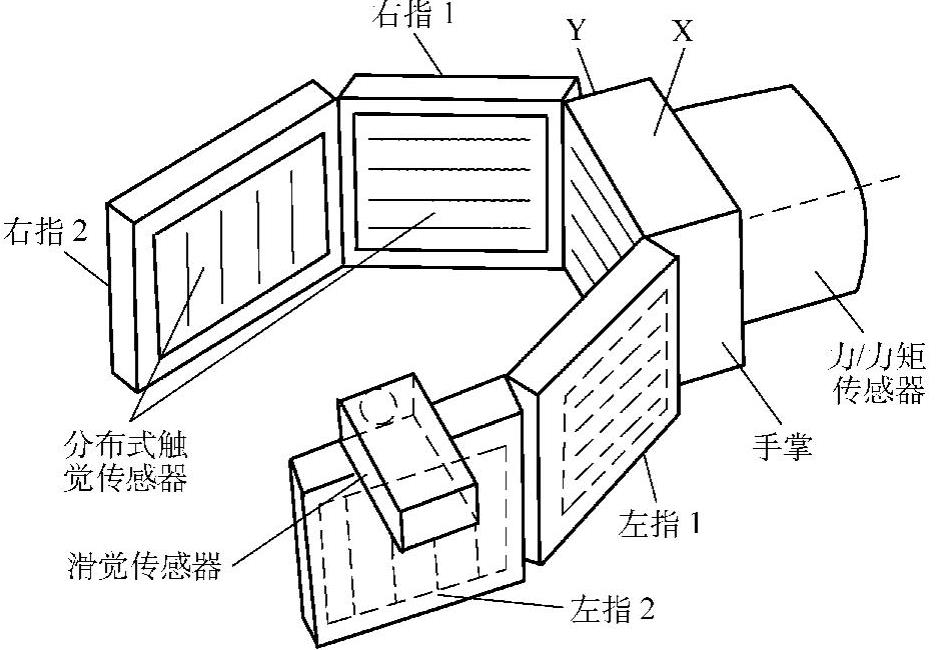
图4-51 营救机器人手爪及其传感器分布
②力/力矩传感器。力/力矩传感器为B.L.Autotec Ine.公司生产的谐振梁应变传感器,测力范围为0~98N,测力矩范围为0~9.8N·m,通过串口连接到计算机。传感器坐标系中,沿手的方向为Z向,夹持方向为Y向,X向为Y、Z的法线方向。
③滑觉传感器。“滑”指被抓取得物体在手中的位移,滑觉传感器为球式滑觉传感器。当夹持的物体在手中位移时带动球旋转。球的转动传递给带有狭缝的转盘,采用光电传感器检测转盘的旋转,输出脉冲信号。滑觉传感器原理如图4-52所示,传感器安装在机械手爪的上端,通过弹簧被压在夹持的物体上。滑觉传感器可在两个方向上检测滑移,分辨率为1mm,检测范围为0~50mm,可以检测的最大滑移速度为10mm/s。
④视觉传感器。通过三角测量原理,营救机器人采用激光和CCD摄像机定位来测量援助对象的位移,操作者也可以通过手臂上的CCD摄像机来监测援助对象的状况。
(3)多传感器手爪数据融合系统 多传感器手爪数据融合系统分为机器人手爪稳定抓取模块、状态识别模块、控制模块和反馈控制模块。

图4-52 滑觉传感器原理
①机器人手爪稳定抓取模块。抓取状态的判断依据于分布式触觉传感器的数据。通过得到的每个触觉传感器的输出计算出总的夹持力,利用平均压力计算每个触觉传感器的不同输出量,从而得到稳定抓取的判断条件。
②状态识别模块。从传感器的数据中提取营救工作的4个基本特征量——腕部力矩的变化量、夹持力的变化量、滑动量和抓取位置的变化量,通过这些特征量来判断机器人手爪操作时对人体的可能伤害程度。营救机器人危险操作程度的状态识别特征量,通过上述4个特征量分别乘以其权重系数之和得到。
③控制模块。机器人手爪抓住人的手臂后,按预先设定的策略进行控制。机器人运动的调节控制依靠稳定抓取判断模块中的2个特征量和识别模块中的4个特征量及If-then规则进行判断,并按以上6个特征量的差异来区分不同的优先级。第一优先级控制是抓取姿态的控制,通过调整腕部角度的大小来进行控制。第二优先级控制是抓取力控制,可通过调节抓取力的大小来进行控制。第三优先级控制是运动轨迹控制,确定是进行小调整还是进行大的轨迹变化。如果这些指标进行机器人运动调节时互相矛盾,则按指标的优先级决定下一步的控制操作。通过调节控制,每个特征量会达到稳定的状态,从而使机器人的营救工作的执行处于安全状态,不会伤害人体。
④反馈控制模块。首先检查所有传感器的数据,如果某一传感器的数据超出了正常值,意味着正在接受求援的人处于危险的状态,机器人停止操作,不进行更高一级的处理。通常,机器人会被命令停止工作,并在纠正危险状态后,重新操作。
机器人传感器是传感技术的重要组成部分,与大量使用的工业检测传感器相比,对所获取的传感信息种类和智能化处理的要求更高。一方面,无论是研究还是产业化,均需有多种学科专门技术和先进的工艺装备作为支撑;另一方面,目前机器人产业对传感器的需求不大,使形成机器人传感器产业的经济可行性尚不完备。因此,机器人传感器产业化的问题就需另辟蹊径。利用研究所获取的技术成果,辐射和转换面向其他应用领域,研制适合工业、交通、体育、医学等多种行业使用的检测和传感装置,如六维测力平台、触觉指纹传感器就是良好的开端。
从研究方向上,除不断改善传感器的精度、可靠性和降低成本等努力外,今后的热点可能会随着机器人技术向微型化、智能化方向发展以及应用工业领域从工业结构环境拓展至深海、空间和其他人类难以进入的非结构环境,使机器人传感技术的研究与微电子机械系统、虚拟现实技术有更密切的联系。同时,对传感信息的高速处理和完善的静、动态标定测试技术也将会成为机器人传感器发展的关键技术。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。