



1.机器人智能控制系统概述
机器人的智能经历了从无到有、从低级到高级,并随着科学技术的进步而不断深入发展。随着计算机技术、网络技术、人工智能、新材料和MEMS技术的发展,机器人的智能化、网络化、微型化的发展趋势凸显出来。新出现的各种智能机器人主要有以下几类。
(1)网络机器人 网络技术的发展拓宽了智能机器人的应用范围。利用网络和通信技术,可以对机器人进行远程控制和操作,代替人在遥远的地方工作。利用网络机器人,外科专家可以在异地为患者实施疑难手术。2000年,身在美国纽约的外科医生雅克·马雷斯科成功地用机器人为躺在法国东北部城市的一位女患者做了胆囊摘除手术,这就是一个网络机器人成功应用的范例。在国内,北京航空航天大学、清华大学和海军总医院共同开发的通控操作远程医用机器人系统,可以在异地为患者实施开颅手术。
(2)微型机器人 日本东京工业大学的一名教授对微型和超微型机构的尺寸作了一个基本的定义:机构尺寸在1~100mm的为小型机构,10μm~1mm的为微型机构,10μm以下的为超微型机构。微型机器人的发展依赖于微加工工艺、微传感器、微驱动器和微结构四个支柱。现已研制出直径20μm、长150μm的铰链连杆和200μm×200μm的滑块结构以及微型的齿轮、曲柄、弹簧等。贝尔实验室已开发出一种直径为400μm的齿轮。
美国IBM公司瑞士苏黎世实验室与瑞士巴塞尔大学的科学家正在研究利用DNA(脱氧核糖核酸)的结构特性为微型机器人提供动力的新方法。利用这一方法,科学家可能制造出不用电池的新一代微型机器人。
(3)高智能机器人 美国著名的科普作家阿西莫夫曾设想机器人具有这样的数学天赋:“能像小学生背乘法口诀一样来心算三重积分,做张量分析题如同吃点心一样轻巧。”1997年,IBM公司开发的名为“深蓝”的RS/6000sP超级计算机打败了国际象棋之王——卡斯帕罗夫,显示了大型计算机的威力。“深蓝”重达1.4t,有32个节点,每个节点有8块专门为进行国际象棋对弈设计的处理器,平均运算速度为每秒200万步。机器人需要处理和存储的信息量大,要求计算机的实时处理速度快。如果将“深蓝”这样的计算机体积缩小到相当小,就可以直接放入机器人的脑袋里。有了硬件支持以及人工智能的突破,更高智能的机器人一定会出现。
(4)变结构机器人 智能机器人工作环境千变万化,科学家梦想着机器人能像人和动物一样运动。例如像蛇一样爬行,像人一样用两条腿行走。日本在仿人形机器人上取得了很大的进步,但是机器人的行走速度慢,对地面的要求很高。真正达到像人一样行走的水平,道路仍然漫长。
2.机器人智能控制的特点及控制系统的基本结构
智能机器人的控制技术包含智能控制技术、电子电路技术、计算机技术、多传感器信息融合技术、先进制造技术、网络技术等技术,是一个相当广泛的多学科交叉的研究领域。
人类生活对高度智能化机器人的需求,使得基于经典优化方法的控制策略已经远远不能满足智能机器人技术发展的需要。寻找具有柔顺性和智能性的控制策略,已成为智能机器人研究中最迫切的问题之一。实际上,机器人系统一般是由若干子系统和反馈回路组成的复杂多变量非线性系统,其系统模型是非常复杂的,具体可概括为三个方面。
(1)模型的不确定性 传统的控制是基于模型的控制。这里所说的模型既包括控制对象也包括干扰的模型。对于传统控制,通常认为模型是已知的,或者是经过辨识可以得到的,而智能控制的研究对象通常存在严重的不确定性。
(2)系统的高度非线性 在传统的控制理论中,线性控制理论比较成熟。对于具有高度非线性的控制对象,虽然也有一些非线性的控制方法可利用,但是总的说来,非线性控制理论还是很不成熟的,而且有些方法也过于复杂。机器人是一个典型的非线性对象,机器人的控制是一个比较复杂和困难的问题,智能控制方法可能是一种解决这个问题的出路。
(3)控制任务的复杂性 在传统的控制系统中,控制的任务或者要求输出量为定值(调节系统),或者要求输出量跟随期望的运动轨迹(跟随系统),因此控制任务的要求比较单一。对于智能控制系统,其任务要求往往比较复杂。例如在智能机器人系统中,它要求系统对一个复杂的任务具有自行规划和决策的能力、有自动躲避障碍运动到期望目标位置的能力等。对于这些复杂的任务要求,就不能只依靠常规的控制方法来解决。
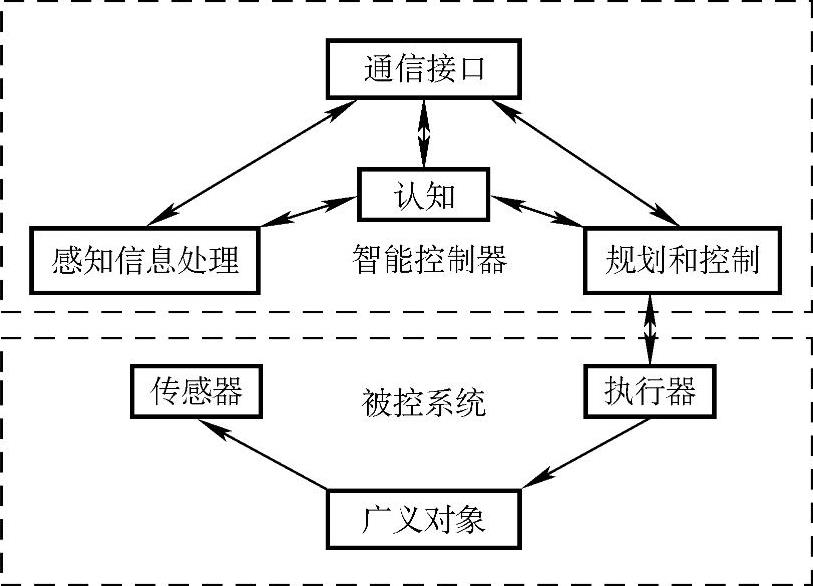
图4-14 智能机器控制系统的典型结构
智能机器控制系统的典型结构如图4-14所示。在该系统中,广义对象包括通常意义下的控制对象和所处的外部环境。对于智能机器人系统,机器人手臂、被操作物体及其所处环境统称为广义对象。传感器则包括关节位置传感器、力传感器,或者还可能包括触觉传感器、滑觉传感器或视觉传感器等。感知信息处理将传感器得到的原始信息加以处理,例如视觉信息需要经过很复杂的处理后才能获得有用的信息。认知部分主要用来接收和储存各种信息、知识、经验和数据,并对它们进行分析、解释,做出行动的决策,送给规划和控制部分。通信接口除建立人机之间的联系外,也建立系统中各模块之间的联系。规划和控制是整个系统的核心,它根据给定的任务要求、反馈的信息以及经验知识,进行自动搜索、推理决策、动作规划,最终产生具体的控制作用,经执行部件作用于控制对象。对于不同用途的智能控制系统,以上各部分的形式和功能可能存在较大的差异。
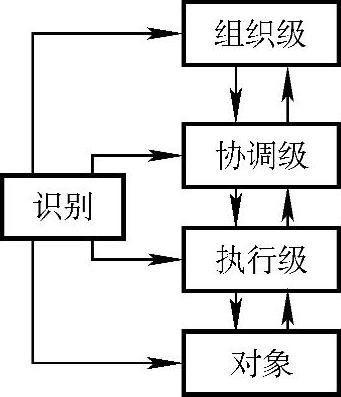
G.N.萨里迪斯提出了智能控制系统的分层递阶的智能控制结构形式,如图4-15所示。其中,执行级一般需要比较准确的模型,以实现具有一定精度要求的拧制任务;协调级用来协调执行级的动作,它不需要精确的模型,但需要学习功能,以便在再现的控制环境中改善性能,并能接受上一级的模糊指令和符号语句;组织级将操作员的自然语言翻译成机器语言,组织决策、规定任务,并直接干涉低层的操作。在执行级中,识别的功能在于获得不确定的参数值或监督系统参数的变化;在协调级中,识别的功能在于根据执行级送来的测量数据和组织级送来的指令产生出合适的协调作用;在组织级中,识别的功能在于翻译定性的命令和其他的输入。该分层递阶的智能控制系统具有两
个明显的特点:
①对控制来讲,自上而下控制的精度越来越高。(https://www.xing528.com)
②对识别来讲,自下而上的信息回馈越来越粗略,相应的智能程度越来越高。这种分层递阶的结构形式已成功地应用于机器人的智能控制。
3.机器人智能控制理论概述
根据智能机器人的任务分解,在面向设备的基础级可以采用常规的自动控制技术,如PID控制、前馈控制等。在协调级和组织级,存在不确定性,控制模型往往无法建立或建立的模型不够精确,无法取得良好的控制效果。因此,需要采用智能控制方法,如神经网络控制、模糊控制、专家控制以及集成智能控制。
(1)神经网络控制 基于人工神经网络的控制称为神经网络控制。神经网络控制采用仿生学的观点与方法来研究人脑和智能系统的高级信息处理。神经网络控制器模仿人的形象思维,将输入和输出映射成控制信号。一旦模型建立后,在输入状态信息不完备的情况下,也能快速作出响应,进行模式识别。神经网络控制不需要数学建模,这对于智能机器人的控制来说,是十分理想的。但神经网络控制存在自学习的问题,即当环境发生变化,原来的映射关系不再适用时,需要重新训练网络。
(2)模糊控制1965年,美国著名控制论学者L.A.Zadeh首次提出一种完全不同于传统数学与控制理论的模糊集合理论,把信息科学推进到人工智能的新方向。基于模糊逻辑理论的控制方法称为模糊控制。1986年,世界上第一块基于模糊逻辑的人工智能芯片在著名的贝尔实验室研制成功。事实表明,模糊理论具有强大的生命力和广阔的应用前景。模糊理论之所以能在信息时代获得如此迅速的发展,是由于它为信息革命提供了一种新的富有魅力的数学工具与手段,具有以下优点:
①模糊理论给出了一种表现自然语义的理论和方法,使自然语言能够转化成机器可以“理解”和接受的东西,提高了机器的灵活性。
②模糊理论给出了模糊逻辑和近似推理的理论和方法,用简单的软、硬件可以使机器更“聪明”、智能化程度更高。模糊洗衣机、模糊冰箱等家电产品的面世充分证明了这点。
③模糊理论的应用面广。模糊控制能够将人的控制经验及推理过程纳入到自动控制策略中。在经典模糊控制方面取得一大批有实际意义成果的同时,人们开始重视经典模糊控制系统稳态性能的改善、模糊集成控制、模糊自适应控制、专家模糊控制、神经模糊控制与多变量模糊控制理论与设计方法的研究。
模糊控制应用于无法建立数学模型或难以建立数学模型的场合。模糊控制提供了一种实现基于自然语言描述规则的控制规律的新机制,同时也提供了一种改进非线性控制器的替代方法。这些非线性控制器一般用于控制含有不确定性和难以用传统非线性理论来处理的装置。模糊控制单元由模糊规则库、模糊产生器、模糊推理机和模糊消除器4个功能模块组成,其基本功能结构如图4-16所示。模糊规则库用于存储系统的基于语言变量的控制规则和系统参数,模糊产生器模块实现对系统变量论域的模糊划分和对清晰输入值的模糊化处理,模糊推理机是一种输入空间到输出空间的非线性映射关系,模糊消除器模块将推论出的控制作用转化为清晰的输出值,用于控制外部设备。在模糊控制器中,推理规则的形式为
IF<控制状态A>THEN<控制作用B>
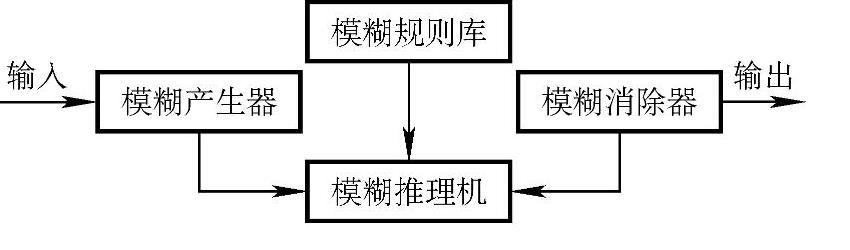
图4-16 模糊控制单元的基本功能结构
(3)模糊神经控制 神经网络的输入/输出映射关系表现为一种权值矩阵,不容易被理解,模糊系统具有自然语言的表达能力。模糊神经控制系统是神经网络技术与模糊逻辑控制技术相结合的产物,是基于神经网络的模糊控制方法。常规的模糊神经控制方法是指用一个神经网络实现常规模糊控制器的功能,根据神经网络实现的模糊逻辑控制功能范围,大致可分为两种:一种是由神经网络实现模糊控制规则及模糊推理,另一种则由神经网络实现全部模糊逻辑控制的功能。前者是一种局部网络化的结构,后者是一种全网络化的结构。局部网络化结构的常规模糊神经控制器如图4-17所示。在定义了偏差、偏差变化率和控制作用三个语言变量的语言值及其隶属函数,并建立了模糊控制规则之后,就可以把这些规则转换为神经网络的一组输入/输出样本。采用BP学习算法训练神经网络,调整网络权值,使得网络实现这组样本所对应的输入/输出映射。这样,网络就记忆了模糊控制规则。在线运行时,控制器根据实际输入的误差e和误差变化率ec,用通常的模糊化处理方法转化为相应的模糊子集E和Ec,神经网络进行推理,得到控制作用U,控制器内用通常的解模糊方法得到精确的控制作用,输出给被控对象。

图4-17 局部网络化结构的常规模糊神经控制器
在图4-17中,神经网络实现了常规模糊神经控制器的模糊规则库及其推理功能,而模糊化、解模糊等功能仍由常规的模糊处理来实现。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。