



目前,用于喷漆、搬运、点焊等操作的工业机器人只具有简单的轨迹控制。轨迹控制适用于机器人的末端执行器在空间沿某一规定的路径运动,并且在运动过程中不与任何外界物体接触。对于执行擦玻璃、转动曲柄、拧螺钉、研磨、打毛刺、装配零件等作业的机器人,其末端执行器与环境之间存在力的作用,且环境中的各种因素不确定,此时仅使用轨迹控制就不能满足要求。执行这些任务时,必须让机器人末端执行器沿着预定的轨迹运动,同时提供必要的力,使它能克服环境中的阻力或符合工作环境的要求。为了在位置控制系统中能对力进行控制,需要设计一套十分精密的控制装置,同时必须掌握确切的位置参数和环境刚度参数。要制造出这样高精度的机器人,只有放弃对机器人的尺寸、重量方面的追求,并且要付出很高的造价。而采用对机器人末端执行器上的接触力直接进行控制的方法,可以容易地解决此类问题。
以擦玻璃为例,如果机器人手爪抓着一块很大很软的海绵,并且知道玻璃的精确位置,那么通过控制手爪相对于玻璃的位置可以完成擦玻璃作业;但如果作业是用刮刀刮去玻璃表面上的油漆,而且玻璃表面空间位置不准确,或者手爪的位置误差比较大,由于存在沿垂直玻璃表面的误差,作业执行的结果不是刮刀接触不到玻璃就是刮刀把玻璃打碎。因此,根据玻璃位置来控制擦玻璃机器人是行不通的。比较好的方法是控制工具与玻璃之间的接触力,这样即便是工作环境(如玻璃)位置不准确时,也能保持工具与玻璃正确接触。相应地,机器人不但要有轨迹控制的功能,而且要有力控制的功能。
机器人具备了力控制功能后,能胜任更复杂的操作任务,如完成零件装配等复杂作业。如果在机械手上安装力传感器,机器人控制器就能够检测出机械手与环境的接触状态,可以进行使机器人在不确定的环境下与该环境相适应的控制。这种控制称为柔顺(Compliance)控制,是机器人智能化的特征。
机器人具备了力控制功能,还可以在一定程度上放宽其精度指标,降低对整个机器人体积、重量以及制造精度方面的要求。由于采用了测量力的方法,机器人和作业对象之间的绝对位置误差不像单纯的位置控制系统那么重要。由于机器人与物体接触后,即便是中等硬度的物体,相对位置的微小变化都会产生很大的接触力,利用这些力进行控制,能提高位置控制的精度。
1.力控制基本概念
机器人运动学和动力学并没有讨论机器人与环境接触时的关系,但由于力只有在两个物体接触时才产生,因此机器人的力控制是将环境考虑在内的控制问题,也是在环境约束条件下的控制问题。
机器人在执行任务时,一般受到两种约束:一种是自然约束,它是指机器人手爪(或工具)与环境接触时,环境的几何特性构成对作业的约束;另一种是人为约束,它是人为给定的约束,用来描述机器人预期的运动或施加的力。
自然约束是在某种特定的接触情况下自然发生的约束,与机器人的运动轨迹无关。例如当机器人手部与固定刚性表面接触时,不能自由穿过这个表面,称为自然位置约束;若这个表面是光滑的,则不能对手爪施加沿表面切线方向的力,称为自然力约束。一般可将接触表面定义为一个广义曲面,沿曲面法线方向定义自然位置约束,沿切线方向定义自然力约束。
人为约束与自然约束一起规定出希望的运动或作用力,每当指定一个需要的位置轨迹或力时,就要定义一组人为约束条件。人为约束也定义在广义曲面的法线和切线方向上,但人为力约束在法线方向上,人为位置约束在切线方向上,以保证与自然约束相容。
图4-12表示出了旋转曲柄和拧螺丝两种作业的自然约束和人为约束。在图4-12a中,约束坐标系建立在曲柄上,随曲柄一起运动,规定Cx方向总是指向曲柄的轴心。当机器人手爪紧握曲柄的手把摇着曲柄转动时,手把可以绕自身的轴心转动。在图4-12b中,约束坐标系建在螺丝刀顶端,在工作时随螺丝刀一起转动。为了不让螺丝刀从螺钉槽中滑出,在方向Cy的力为零,作为约束条件之一。在约束坐标系中,某个自由度若有自然位置约束,则在该自由度上就应规定人为力约束,反之亦然。为适应位置和力的约束,在约束坐标系中的任何给定自由度都要受控制。机器人的位置约束用手爪在约束坐标系中的速度分量[υxυyυzωxωyωz]T表示,力约束则用在约束坐标系中的力/力矩分量[fxfyfzτxτyτz]T表示。
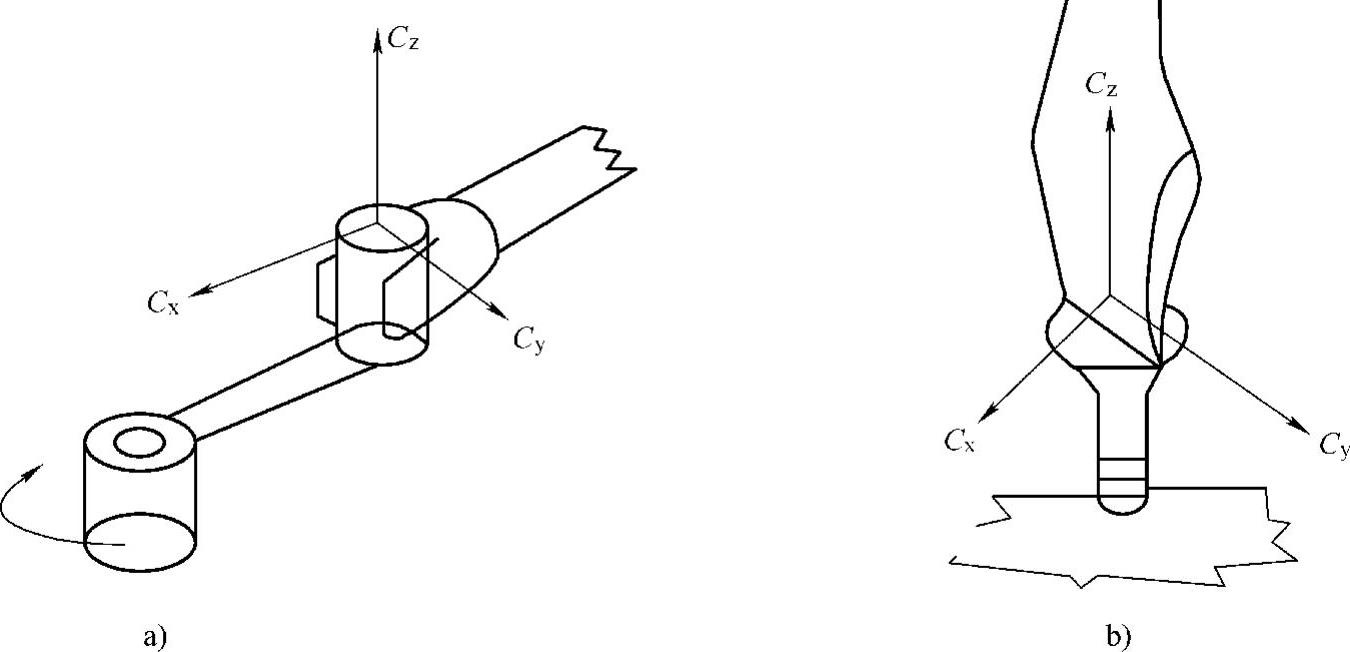
图4-12 两种作业的自然约束和人为约束
a)旋转曲柄 b)拧螺钉

可见,自然约束和人为约束把机器人的运动分成两组正交的集合,在控制时,必须根据不同的规则对这两组集合进行控制。
2.控制策略
对于机器人旋转曲柄和拧螺钉这样的任务,在整个工作过程中,自然约束和人为约束保持不变;但在比较复杂的情况下,如机器人执行装配作业时,需要把一个复杂的任务分成若干个子任务,对每个子任务规定约束坐标系和相应的人为约束,各子任务的人为约束组成一个约束序列,按照这个序列实现预期的任务。在执行作业过程中,必须能够检测出机器人与环境接触状态的变化,以便为机器人跟踪环境(用自然约束描述)提供信息。根据自然约束的变化,调用人为约束条件,实施与自然约束和人为约束相适应的控制。
图4-13表示将一个插销插入孔中的装配过程:首先把插销放在孔的左侧平面上,然后在平面上平移滑动,直到掉入孔中,再将插销向下插入孔底。上述每个动作定义为一个子任务,然后分别给出自然约束和人为约束,根据检测出的自然约束条件变化的信息,调用人为约束条件。
将约束坐标系建在插销上,在插销从空中向下落的过程中,插销与环境不接触,其运动不受任何约束,因此自然约束为F=0。(https://www.xing528.com)
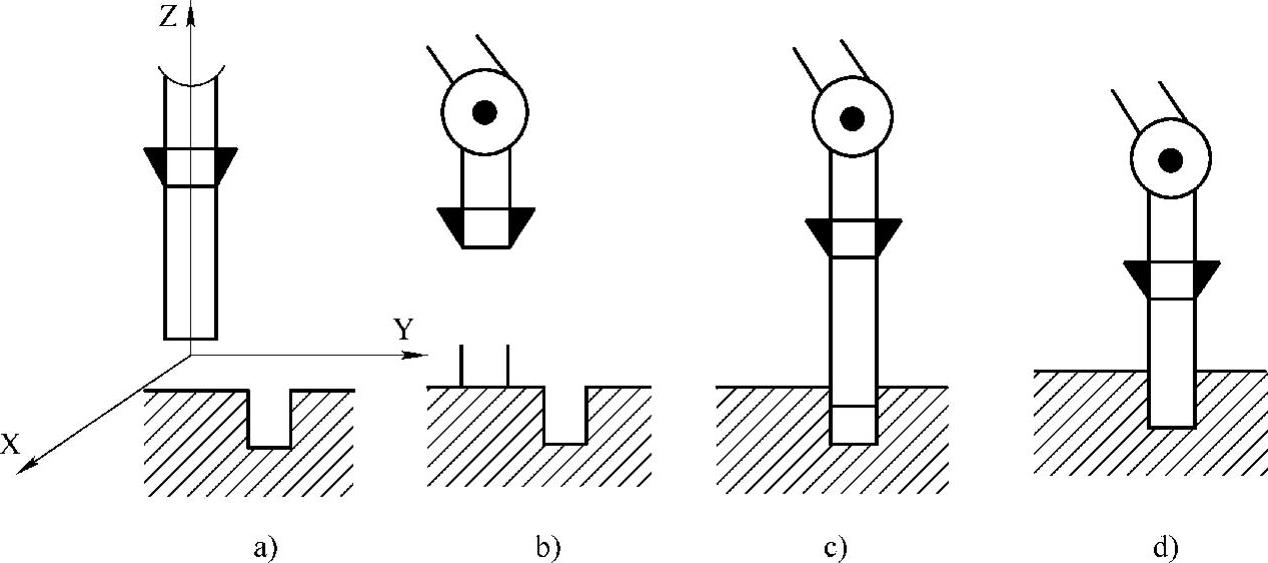
图4-13 插销入孔作业过程
a)步骤一 b)步骤二 c)步骤三 d)步骤四
根据任务要求,规定任务约束条件是插销沿Z方向以速度υz趋近平面,所以人为约束为[0 0 υz 0 0 0]T
当插销下降到与平面接触时,如图4-13b所示,可以通过力传感器检测到接触的发生,生成了一组新的自然约束:插销不能再沿Z方向运动,也不能在X和Y方向自由转动,同时在其他3个自由度上不能自由地作用力,其自然约束表达式为
υz=0,ωx=0,ωy=0,fx=0,fy=0,τz=0
在此条件下,人为约束的规定应满足插销在平面上沿Y方向以速度υh滑动,并在Z方向施加较小的力fi保持插销与平面接触,所以人为约束表达式为
υx=0,υy=υh,ωx=0x,fz=fi,τx=0,τy=0
当检测到沿Z方向的速度,表明插销进入了孔中,如图4-13c所示,说明自然约束又发生了变化。必须改变人为约束条件,即以速度υin把插销插入孔中,这时的自然约束为
υx=0,υy=0,ωx=0,ωy=0,fz=0,τz=0
相应的人为约束为
υz=υin,ωz=0,fx=0,fy=0,τx=0,τy=0
从以上过程可以看出:自然约束的变化是依据检测到的信息来确认的,而这些被检测的信息多数是不受控制的位置或力的变化量。例如插销从接近到接触,被控制量是位置,而用来确定是否达到接触状态的被检测量是不受控制的力;手部的位置控制是沿着有自然力约束的方向,而手部的力控制则是沿着有自然位置约束的方向。
3.柔顺拉制
所谓柔顺是指机器人对外界环境变化适应的能力。机器人与外界环境接触时,即使外界环境发生了变化(如零件位置或尺寸的变化),机器人仍然能够与环境保持预定的接触力,这就是机器人的柔顺能力。为了使机器人具有一定的柔顺能力,需要对机器人进行柔顺控制。柔顺控制的本质是力和位置的混合控制。
实现柔顺控制的方法有两类:一类是力和位置混合控制,另一类是阻抗控制。
所谓力和位置混合控制,是指机器人末端执行器在某个方向受到约束时,同时进行不受约束方向的位置控制和受约束方向的力控制的控制方法。其特点是力和位置是独立控制的,控制规律是以关节坐标给出的。
阻抗控制,顾名思义,就是控制力和位移之间的动力学关系,使机器人末端呈现需要的刚性和阻尼。阻抗控制不是直接控制期望的力和位置,而是通过控制力和位置之间的动态关系来实现柔顺控制。这种动态关系类似于电路中阻抗的概念,因而称为阻抗控制。任一自由度上的机械阻抗是该自由度上的动态力增量与由它引起的动态位移增量之比。机械阻抗是个非线性动态系数,表示机械动力学系统在任一自由度上的动刚度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。