



一个工业机器人系统通常分为机构本体和控制系统两大部分。控制系统的主要作用是根据用户的指令对机构本体进行操作和控制,完成作业的各种动作。控制系统的性能在很大程度上决定了机器人系统的性能。一个良好的控制器要有灵活、方便的操作方式,多种形式的运动控制方式和安全可靠地运行。构成机器人控制系统的要素主要有计算机硬件系统及操作控制软件、输入/输出设备及装置、驱动器系统、传感器系统,它们之间的关系如图4-3所示。
工业机器人控制系统是机器人的重要组成部分,以完成特定的工作任务,其基本功能如下:
①记忆功能。包括存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。

图4-3 机器人控制系统的要素
②示教功能。包括离线编程、在线示教、间接示教,在线示教包括示教盒和导引示教两种。
③与外围设备联系功能。包括输入和输出接口、通信接口、网络接口、同步接口。
④坐标设置功能。包括关节、绝对用户自定义坐标系等。
⑤人机接口。包括示教盒、操作面板、显示器等。
⑥传感器接口。包括位置检测、视觉、触觉、力觉等。
⑦位置伺服功能。包括机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。
⑧故障诊断安全保护功能。包括运行时系统状态监视、故障状态下的安全保护和故障自诊断。
下面以PUMA-562机器人为例,来说明机器人的控制系统的结构和工作原理。
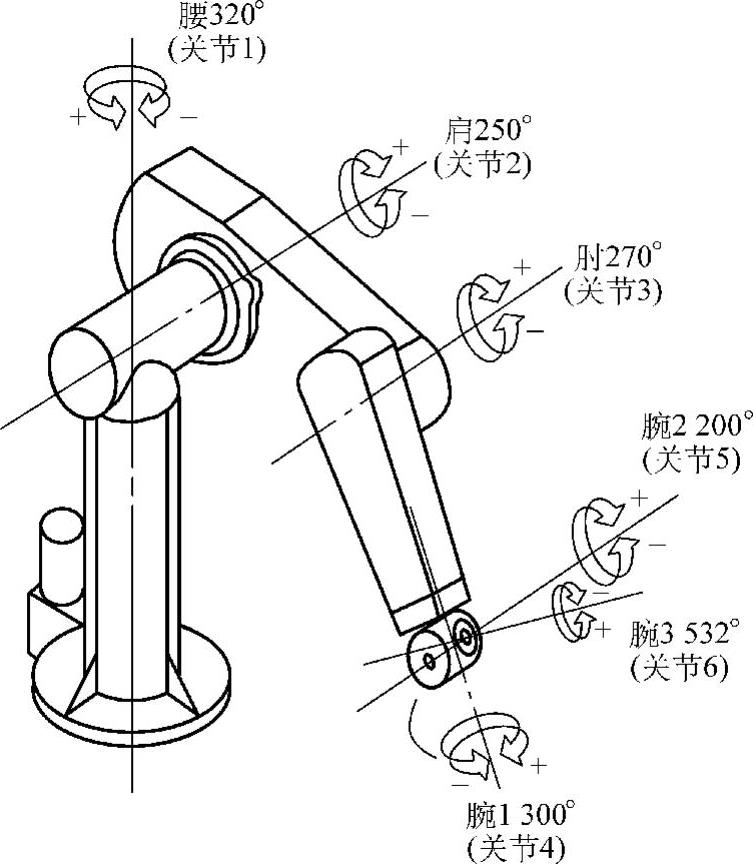
图4-4 PUMA机器人外形结构(https://www.xing528.com)
PUMA机器人是美国Unimation公司于20世纪70年代末推出的商品化工业机器人。PUMA机器人有200、500、700等多个系列的产品。每个系列产品的机器人都有腰旋转、肩旋转和肘旋转等3个基本轴,加上手腕的回转、弯曲和旋转轴,构成六自由度的开链式机构。PUMA机器人的外形结构如图4-4所示。它是一种典型的多关节型工业机器人,其控制系统采用计算机分级控制结构,使用VAL机器人编程语言。由于PUMA机器人具有速度快、精度高、灵活精巧、编程控制容易以及VAL语言系统功能完善等特点,它在工业生产、实验室研究中得到了广泛的应用。
PUMA-562机器人控制器原理框图如图4-5所示。图中除I/O设备和伺服电动机外,其余各部件均安装在控制柜内。PUMA-562机器人控制器为多CPU两级控制结构,上位计算机配有64KB RAM内存、2块串口接口板、1块I/O并行接口板、1块与下位机通信的A接口板。上位计算机系统采用Q-Bus总线作为系统总线。
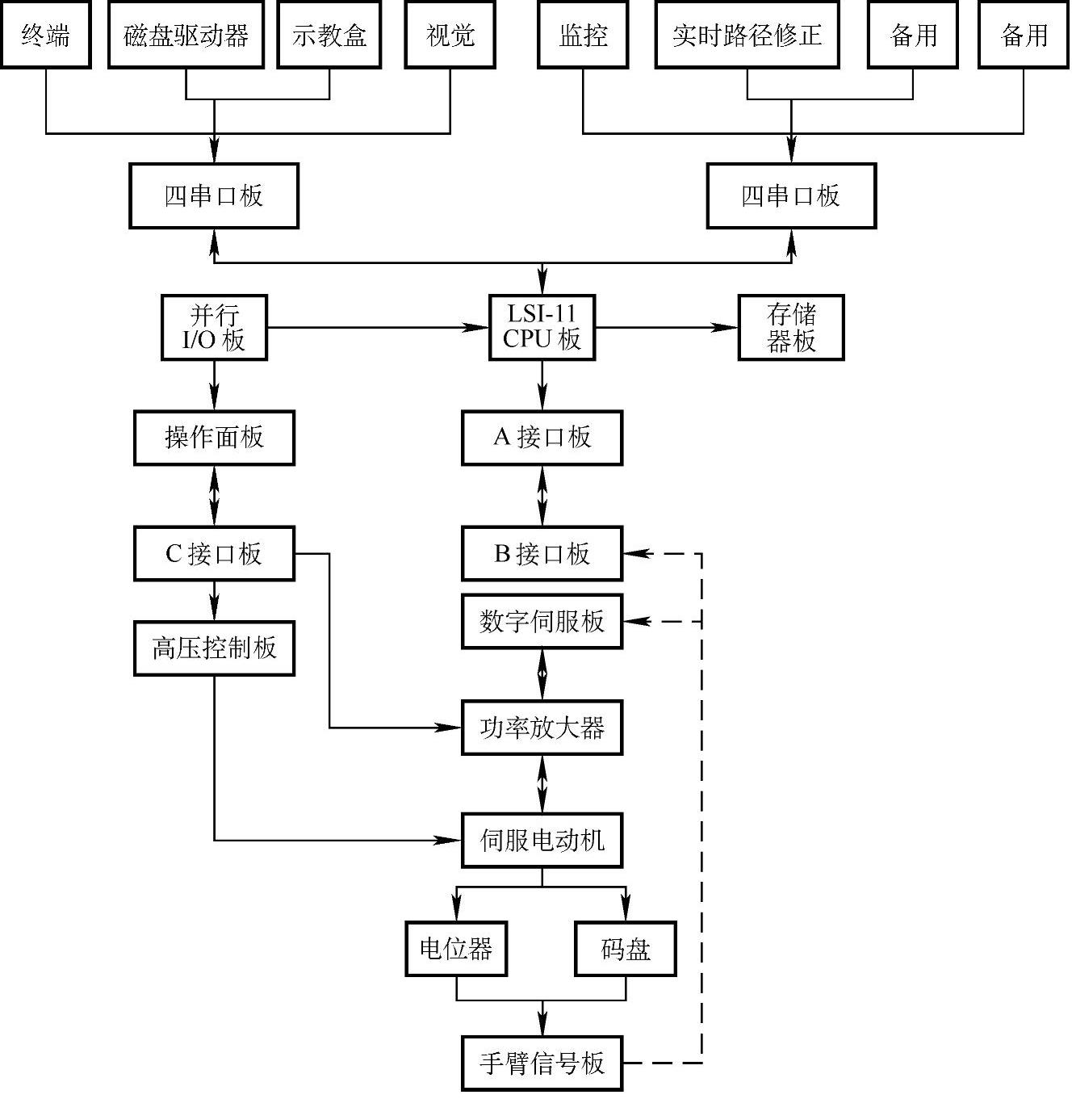
图4-5 PUMA-562机器人控制器原理框图
与上位机连接的I/O设备有CRT显示器和键盘、示教盒、软盘驱动器,通过串口板还可接入视觉传感器、高层监控计算机、实时路径修正控制计算机。
接口板A、B是上、下位机通信的桥梁。上位机经过A、B接口板向下位机发送命令和读取下位机信息。A板插在上位机的Q-Bus总线上,B板插在下位机的J-Bus总线上,A、B接口板之间通过扁平信号电缆通信。B板上有一个A/D转换器,用于读取B接口板传递的各关节电位器信息,电位器用于各关节绝对位置的定位。
PUMA-562下位机控制系统框图如图4-6所示。下位计算机系统由6块以6503CPU为核心的单板机组成,每块板负责一个关节的驱动,构成6个独立的数字伺服控制回路。下位机及B接口板、手臂信号板插在专门设计的J-Bus总线上。下位机的每块单板机上都有一个D/A转换器,其输出分别接到6块功率放大器板的输入端。功率放大器输出与6台直流伺服电动机相接,用于检测位置的光电码盘与电动机同轴旋转,6路码盘反馈信号经手臂信号接口板滤波处理后,由J-Bus通道送往各数字伺服板。用于检测各关节绝对位置的电位器滑动臂是装在齿轮轴上。电位器信号经由手臂信号板J-Bus通道,被送往B接口板。
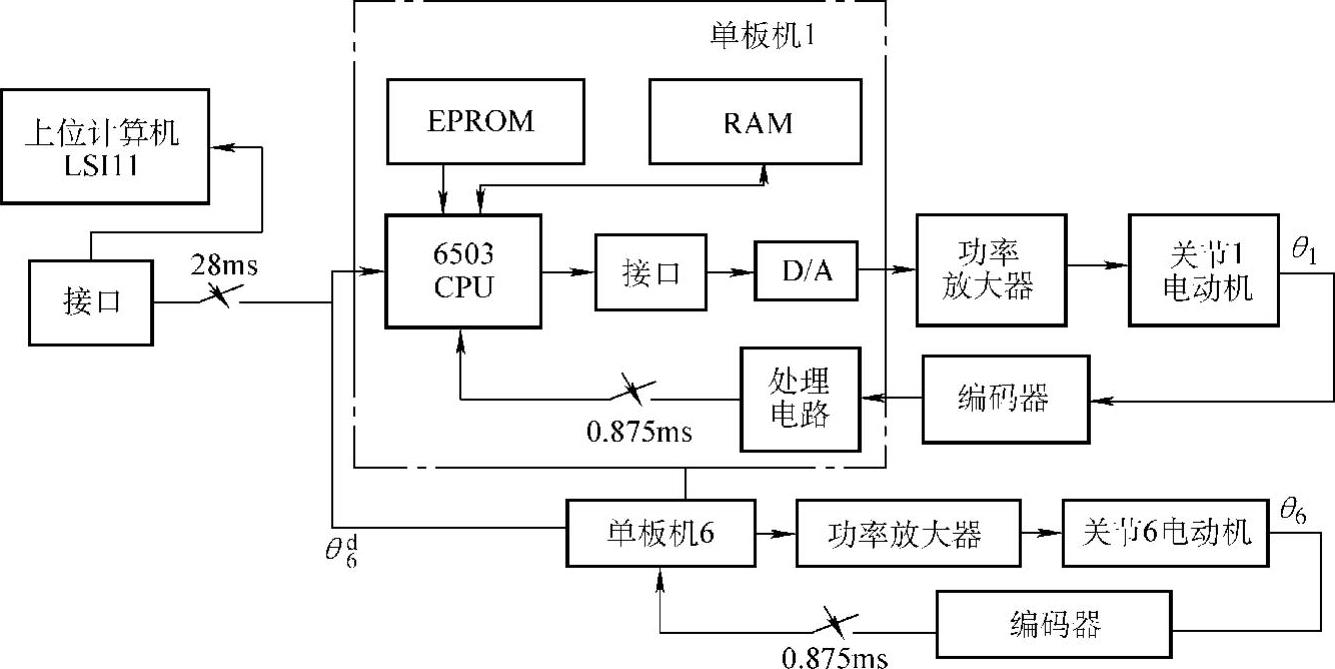
图4-6 PUMA-562下位机控制系统框图
PUMA-562机器人控制器硬件还包括1块C接口板、1块高压控制板和6块功率放大器板,这几块板插在另外的一个专门设计的功率放大器总线(Power Amp Bus)上。C接口板用于手臂电源和电动机制动的控制信号传递、故障检测、制动控制。高压控制板提供电动机所需的电压,还控制手爪开闭电磁阀。
PUMA-562控制系统软件分为上位机软件和下位机软件两部分。上位机软件为系统编程软件,下位机软件为伺服软件。
系统软件提供软件系统的各种系统定义、命令、语言及其编译系统。系统软件针对各种运动形式的轨迹规划、坐标变换,完成以28ms时间间隔的轨迹插补点的计算、与下位机的信息交换、执行用户编写的VAL语言、机器人作业控制程序、示教盒信息处理、机器人标定、故障检测及异常保护等。
PUMA-562控制系统下位机软件驻留在下位单片机的EPROM中。从图4-6中可以看到,下位机的关节控制器是各自独立的,即各单片机之间没有信息交换。上位机每隔28ms向6块单板机发送轨迹设定点信息,6503微处理器计算关节误差,以0.875ms的周期伺服控制各关节的运动。
和一般工业机器人一样,PUMA机器人采用了独立关节的PID伺服控制。由于机器人的非线性特点,即惯性力、关节间的耦连及重力均与机器人的位姿(或位姿和速度)有关,都是变化的,但伺服系统的反馈系数是确定不变的,因此这种控制方法难以保证在高速、变速或变载荷情况下的精度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。