



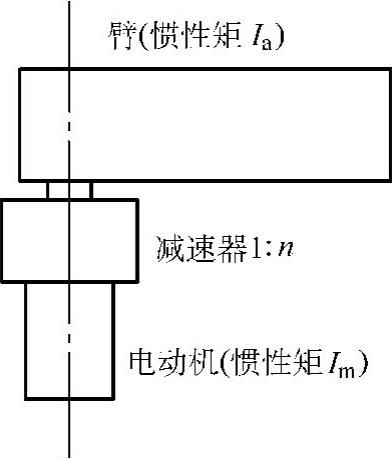
电动机是高转速、低力矩的驱动器,在机器人中要用减速器变成低转速、高力矩的驱动器。
机器人对减速器的要求如下:
1)运动精度高、间隙小,以实现较高的重复定位精度。
2)回转速度稳定、无波动,运动副间摩擦小、效率高。
3)体积小,重量轻,传动转矩大。
减速器减速比n的选择应当能最大限度地利用电动机功率,即机械阻抗匹配。减速比的计算公式为

从现有的工业机器人来看,所选的电动机功率总是偏大,减速比也过大。当减速比大时,工作臂的惯性对电动机影响小,但电动机速度容易饱和;当减速比小时,工作臂运动的反作用力对电动机影响大,这需要进行机构的动力学计算。
在工业机器人中,比较合乎要求且常用的减速器是行星齿轮机构和谐波传动机构。
如图3-55所示为行星齿轮传动机构简图。行星齿轮传动尺寸小,惯量低;一级传动比大,结构紧凑;载荷分布在若干个行星齿轮上,内齿轮也具有较高的承载能力。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-54 机械阻抗匹配
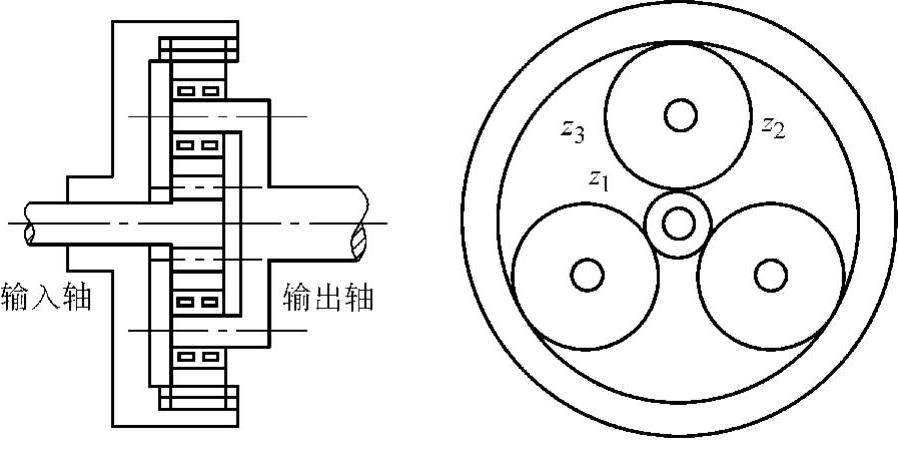
图3-55 行星齿轮传动机构简图
谐波传动在运动学上是一种具有柔性齿圈的行星传动。但是,它在机器人上的应用比行星齿轮传动更加广泛。如图3-56所示是谐波传动机构简图。谐波发生器4转动,使柔轮6上的柔轮齿7与圆形花键轮(刚轮)1上的齿2相啮合。输入轴为3,如果刚轮1固定,则轴5为输出轴;如果轴5固定,则3为输出轴。
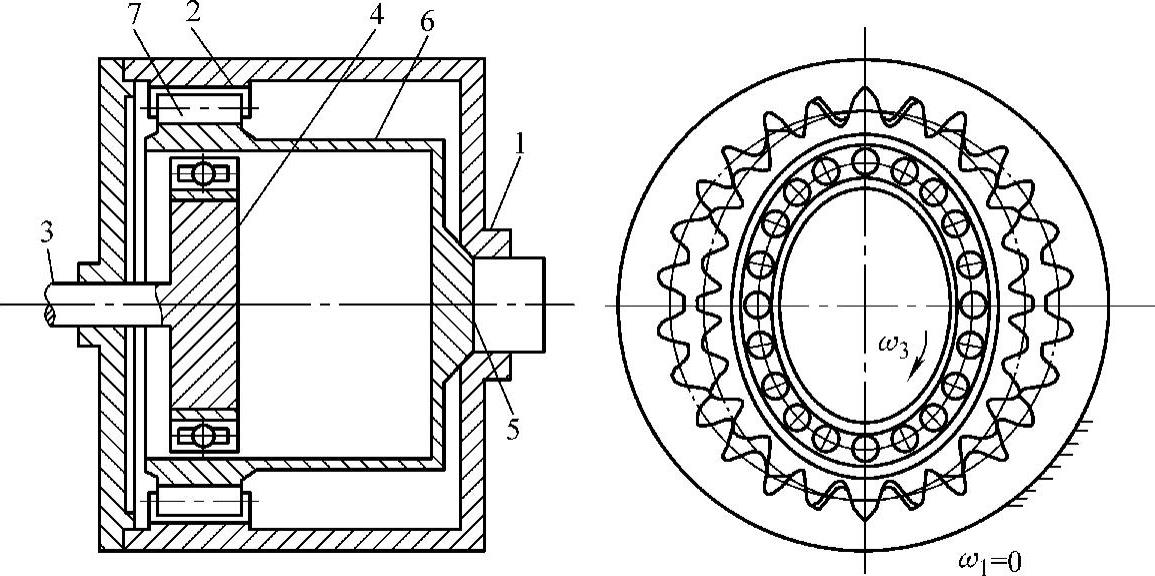
图3-56 谐波传动机构简图
1—刚轮 2—刚轮齿 3—轴 4—谐波发生器 5—轴 6—柔轮 7—柔轮齿
谐波传动的优点是:尺寸小、惯量低;因为误差均布在多个啮合点上,传动精度高;因为预载啮合,传动侧隙非常小;因为多齿啮合,传动具有高阻尼特性。
谐波传动的缺点是:柔轮的疲劳问题;扭转刚度低;以输入轴速度2、4、6倍的啮合频率产生振动;与行星传动相比,谐波传动具有较小的传动间隙和较轻的重量,但是刚度差。
谐波传动机构在机器人技术比较先进的国家已得到了广泛的应用,日本60%的机器人驱动装置采用了谐波传动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。