



行走机构是行走式机器人的重要执行部件,它由行走的驱动装置、传动机构、位置检测元件、传感器电缆及管路等组成。它一方面支承机器人的机身臂和手部,因而必须具有足够的刚度和稳定性;另一方面还根据作业任务的要求,带动机器人在更广阔的空间内运动。
行走机构按其运动轨迹,可分为固定轨迹式和无固定轨迹式。固定轨迹式行走机构主要用于工业机器人,如横梁式机器人。无固定轨迹式行走机构按其行走机构的结构特点,可分为轮式行走机构、履带式行走机构和关节式行走机构。它们在行走过程中,前两者与地面连续接触,其形态为运行车式,多用于野外、较大型作业场所,应用得较多也较成熟;后者与地面为间断接触,为人类(或动物)的腿脚式,该机构正在发展和完善中。
1.固定轨迹式行走机构
固定轨迹式行走机器人的机身设计成横梁式,用于悬挂手臂部件,这是工厂中常见的一种配置形式。这类机器人的运动形式大多为直移式。它具有占地面积小、能有效地利用空间、直观等优点,横梁可设计成固定的或行走的。一般情况下,横梁可安装在厂房原有建筑的柱梁或有关设备上,也可专门从地面架设。
双臂悬挂式结构大多是为1台主机上、下料服务的,1个臂用于上料,另1个臂用于下料,这种形式可以减少辅助时间、缩短动作循环周期、有利于提高生产率。双臂在横梁上的具体配置形式,视工件的类型、工件在机床上的位置和夹紧方式、料道与机床间相对位置及运动形式不同而异。
轴类工件的轴向尺寸较长时,机器人上、下料时移动的距离亦将增加。这种机器人横梁架于机床上空,如图3-37所示,臂的配置也有不同的形式。
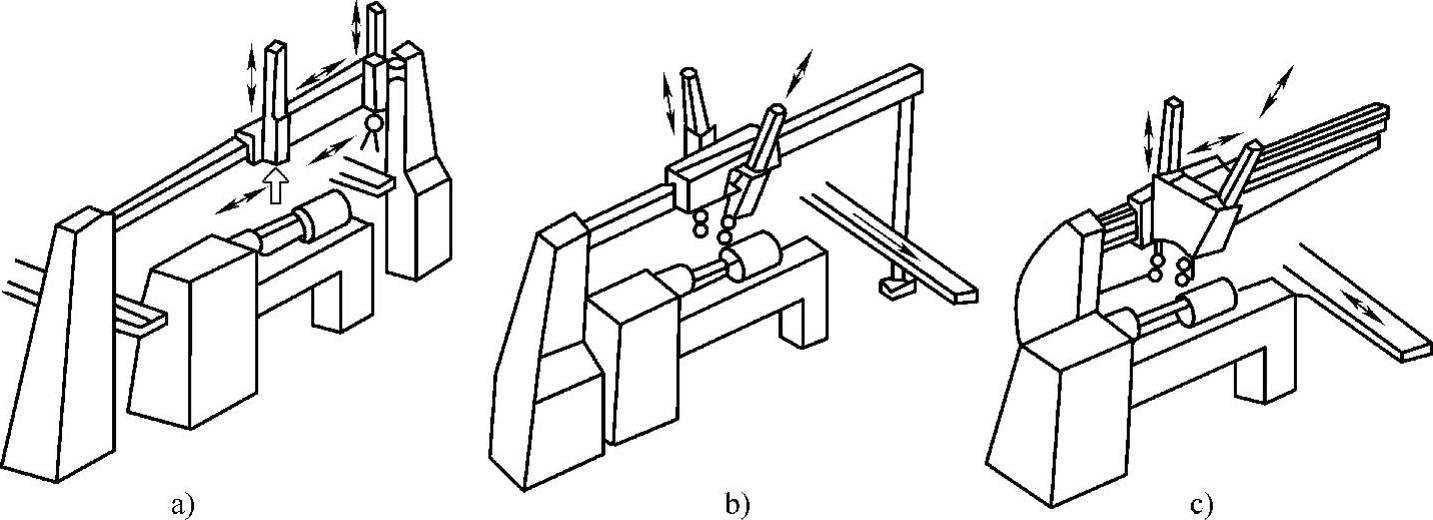
图3-37 轴类零件抓取用双臂悬挂机器人
a)双臂平行配置机器人 b)双臂交叉配置机器人 c)横梁为一悬伸梁的双臂交叉配置机器人
图3-37a所示为双臂平行配置的机器人。双臂与横梁在同一平面内,上料道与下料道分别设在机床两端。为了使双臂能同时动作,缩短辅助时间,两臂间的距离应与料道至机床两顶尖间中点的距离相同,且两臂同步地沿横梁移动。
图3-37b所示为双臂交叉配置的机器人。双臂交叉配置在横梁的两侧,并垂直于横梁轴线。两臂轴线交于机床中心。两臂交错伸缩进行上、下料,并同时沿横梁移动,移动的行程与双臂平行配置的机器人相同。这种配置形式采用同一料道,缩短了横梁长度,且由于两臂位于横梁两侧,可减少横梁的扭转变形。
图3-37c所示为横梁为一悬伸梁的双臂交叉配置的机器人。一般采用等强度铸造横梁,受力比较合理。其行程较图3-37a和3-37b所示的机器人更短些。由于结构限制,双臂必须位于横梁的同一侧。
2.无固定轨迹式行走机构
(1)车轮式行走机构 在相对平坦的地面上,用车轮移动方式行走是相当优越的。车轮式移动机器人如图3-38所示。
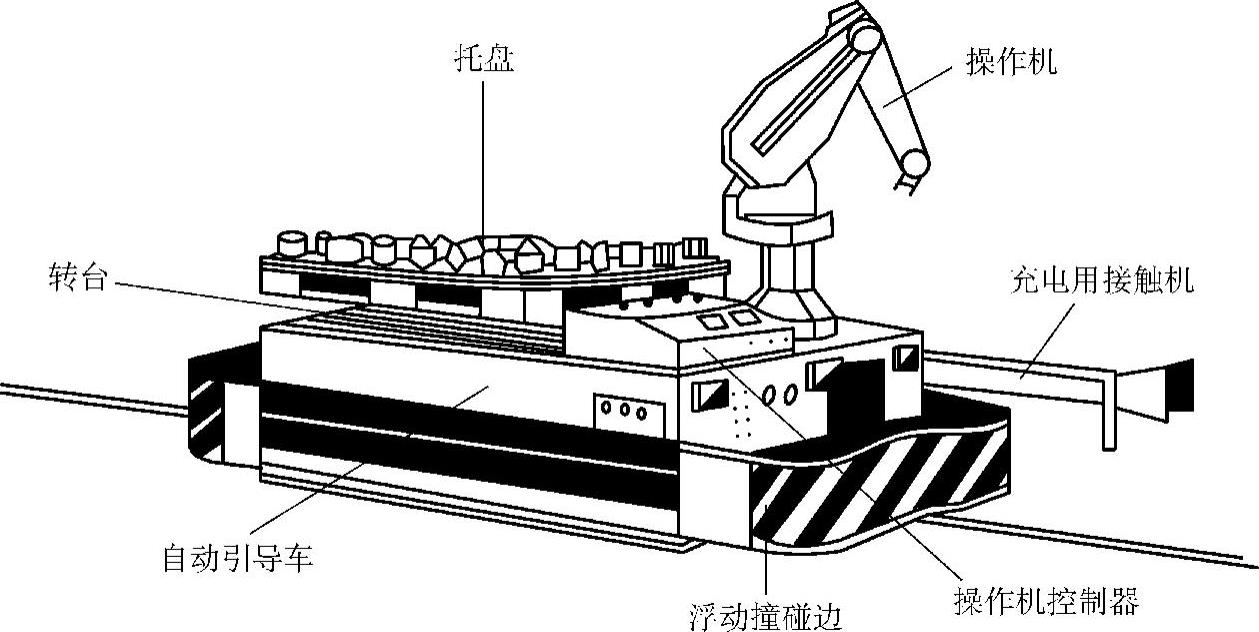
图3-38 感应引导的车轮式移动机器人
该机器人主要由以下几个部分组成:
①1台车轮驱动的自动引导车,作为机器人的移动机座。
②1台可编程的具有6个自由度的机器人。
③转台,用于放置和运输工件的托盘。
④自动引导车和机器人用的单元控制器、蓄电池和辅助定位装置等。
如此配置的移动机器人可用在机床上、下料,机床间工件或工具的传送接收等。车轮式移动机器人是自动化生产由单元生产向柔性生产线乃至无人车间发展的重要设备之一。车轮式移动机构也是遥控机器人移动的一种基本方式。
(2)履带式移动机构 轮式行走机构在野外或海底工作时,遇到松软地面时可能陷车,故宜采用履带式行走机构。它是轮式移动机构的拓展,履带本身起着给车轮连续铺路的作用。
图3-39所示的MF2是典型的越野履带式移动机器人。它像一辆小型坦克车,其主要操作设备是安装在转塔上的抓重200kg的6自由度机器人手臂。在手臂的肘关节1处附有一个
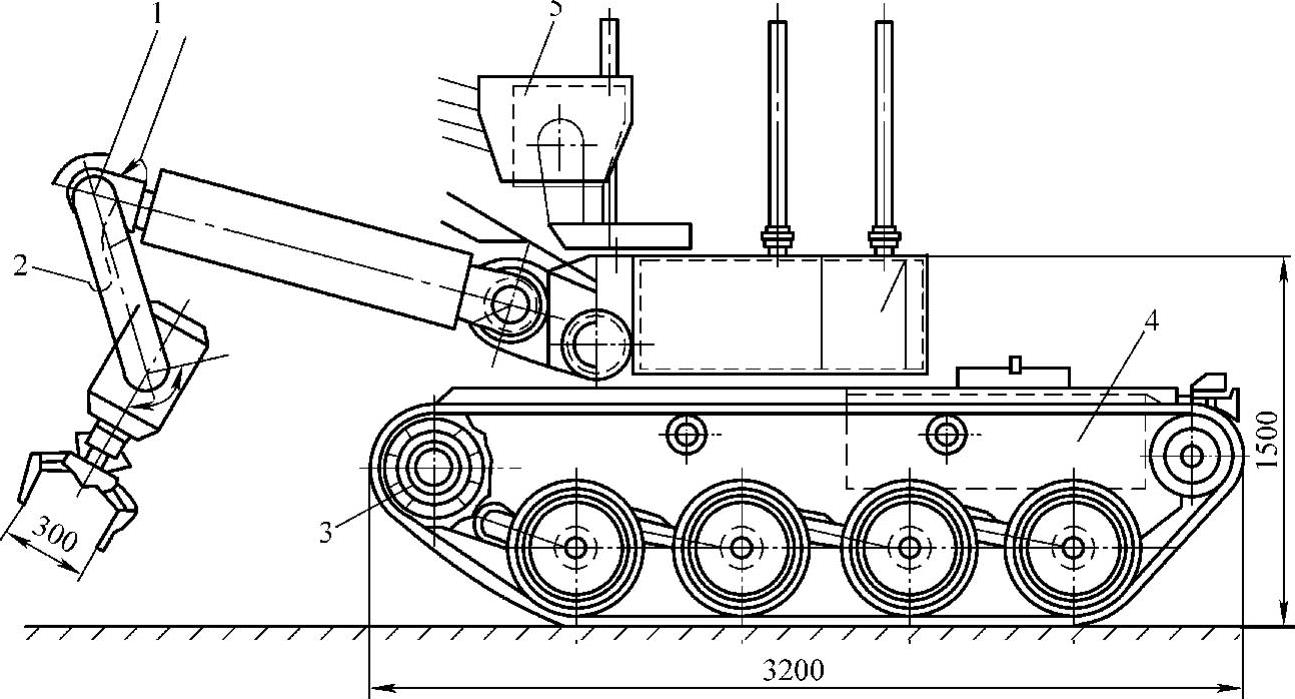
图3-39 MF2履带式移动机器人
1—肘关节 2—吊钩 3—驱动轮 4—蓄电池组 5—云台
承载量为400kg的吊钩2,作为辅助起重设备。履带移动机构左、右两条履带的驱动轮3位于前方,由直流电动机通过齿轮减速器装置驱动。底盘的支承轮悬挂在扭力杆上,在行驶过程中可以减少因颠簸而引起的振动,而在进行操作时可将弹簧悬挂系统锁紧以保持稳定。底盘上装有蓄电池组4,作为移动机器人的直流电源。机器人的主要观测设备大都装在一个位于转塔上的云台(摆动—俯仰头)5上。此云台可以左右摆动和俯仰,以扫描前方的半个球面的视野,必要时还可以向左横移一半的距离。(https://www.xing528.com)
装在云台上的观察设备有:
①2台用来观察操作状况的主体电视摄像机。
②1台用作远距离定向观察、带有变焦镜头的平面电视摄像机。
③4盏探照灯,分别用于远距离照明和宽射束照明。
④2台立体放音器,用来传输附近音响。
⑤必要时,还可装上1~2架小型电影摄影机(立体摄影)或者l架16nm电影摄影机。
此外,转塔前方有1台剂量率探测器和1台环境温度探测器,用来对带有放射性的环境进行监测。
履带移动机构和轮式移动机构相比,有以下特点:
①支承面积大,接地比压小,适合于松软或泥泞场地作业,下陷度小、滚动阻力小、通过性能较好。
②越野机动性好,爬坡、越沟等性能均比轮式移动机构的优越。
③履带支承面上有履齿,不易打滑,牵引附着性能好,有利于发挥较大的牵引力。
同时,履带移动机构也存在结构复杂、重量大、运动惯性大、减振功能差、零件易损坏等不足。
(3)步行式行走机构 与运行车式机构相比,步行式行走机构(见图3-40)有以下优点:
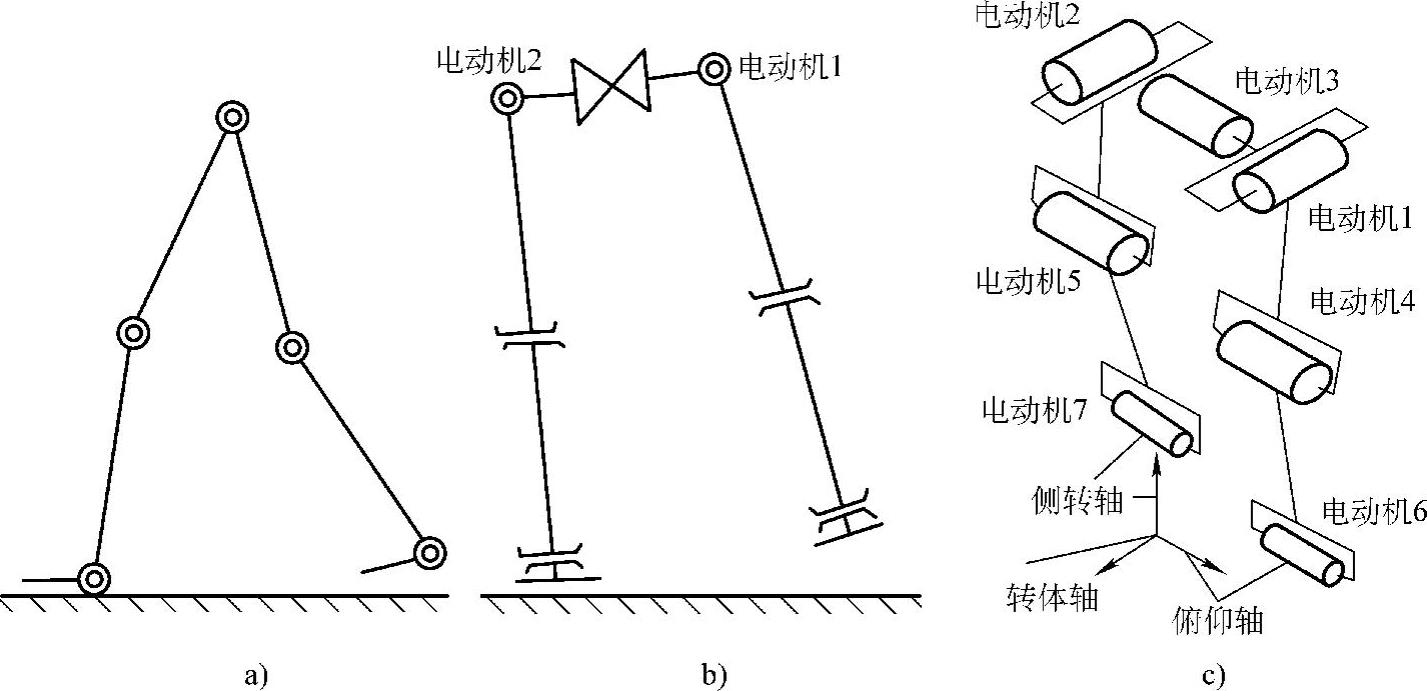
图3-40 步行式行走机构
a)步行式行走机构示意图一 b)步行式行走机构示意图二 c)步行式行走机构
①可以在高低不平的地段上行走。
②由于脚的主动性,身体不随地面晃动。
③在柔软的地面上运动,效率并不显著降低。因为脚在软地行走时,地面的变形是离散的,至多是损失踏一个坑的能量,而且脚还可以利用下沉产生推力,即脚的运动能量变成地面弹性体的位能储存;当腿前进时,这个位能又释放出来,因而可以减少步行机构动能的损失。如果设法减轻拔脚的阻力,那么步行机构就会以较高的效率向前运动了。
1)静步行和动步行。所谓静步行是指机器人在步行过程中始终满足静力学条件,即机器人重心总是落在支持于地面几只脚所围成的多边形面积内。所谓动步行是机器人在步行过程中的重心不总是落在支持于地面上的几只脚所围成的面积内,步行中有时重心落在对应的面积外。动步行恰恰利用这种重心超出面积外而向前产生倾倒的分力作为步行的动力。因此,动步行的速度比静步行的快、消耗能量小,但此时必须根据步行机器人的动停来进行控制。
2)脚数的选择。步行式行走机构脚数的选择,目前意见各异。因为这种机构不仅需要定到指定地点,而且要求站稳并进行操作。若增大脚接地的面积,则在不平的地方行动困难,所以须选3只以上的脚,但考虑到驱动系统所提供的输出功率与重量比,又不能太多地增加执行机构的重量。综合上述因素,静步行还应当以四脚式步行机构为好。因为四脚步行机构不但脚数少,而且节约总的自由度,为提高速度引入动步行也比较容易。
ASIMO(Advanced Step in Innovative Mobility)是最出色的步行机器人的代表,是日本本田公司开发的目前世界上最先进的步行机器人(见图3-41),也是目前世界上唯一能够上、下楼梯,慢速奔跑的双足机器人。虽然其他公司也有类似的双足机器人,但是没有任何一家的产品能在步态仿真度上面能达到ASIMO的水准。ASIMO的智能也同样出色,具有语音识别功能、人脸识别功能甚至使用手势来进行交流。不仅如此,ASIMO的手臂还能够开电灯、开门、拿东西、拖盘子甚至推车(见图3-42)。

图3-41 本田公司最新型的ASIMO
图3-42 ASIMO在推车
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。