



国际标准化组织(ISO)对工业机器人的定义:工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。
工业机器人通常由执行机构、驱动装置、控制系统和智能系统四部分组成,如图10-47所示。这些部分之间的相互作用可用图10-48所示的框图表示。
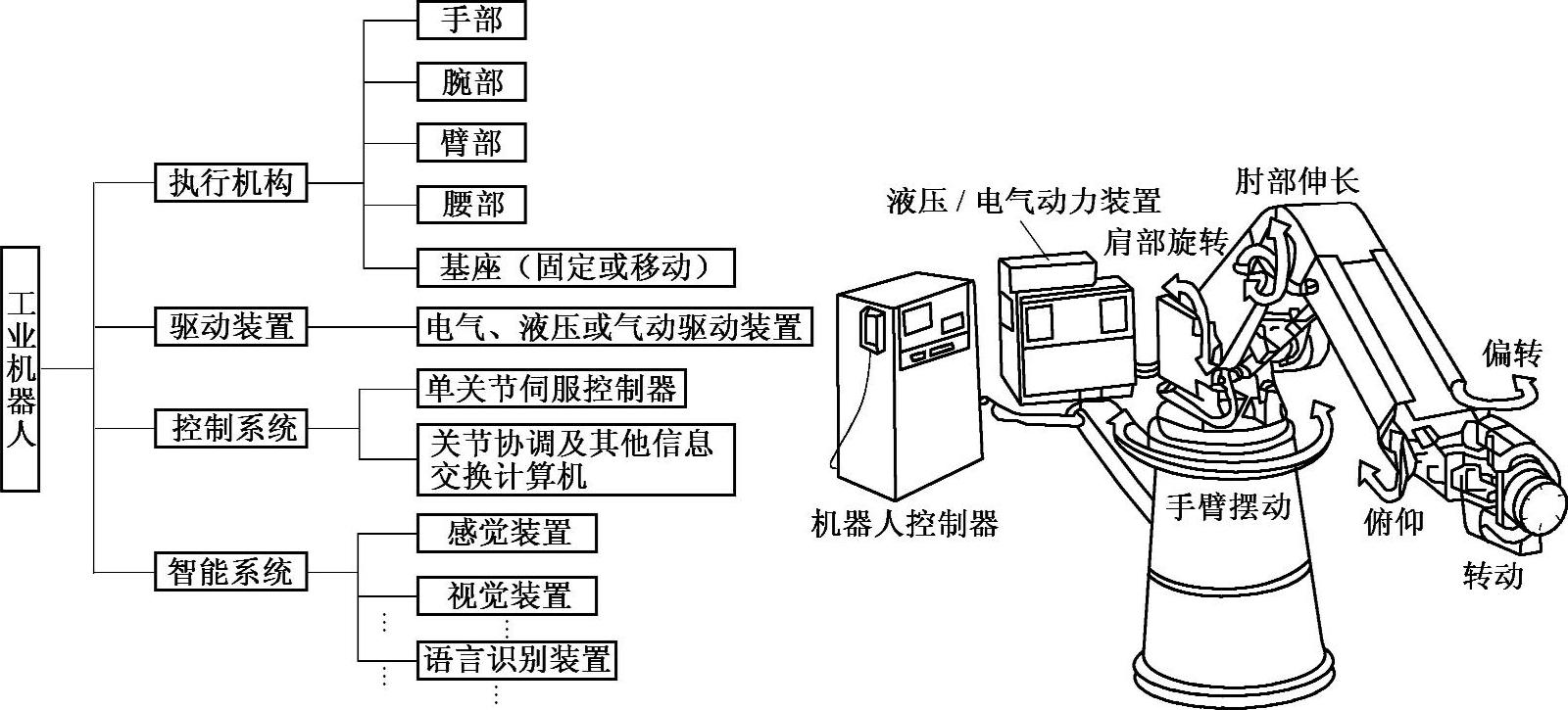
图10-47 工业机器人的组成
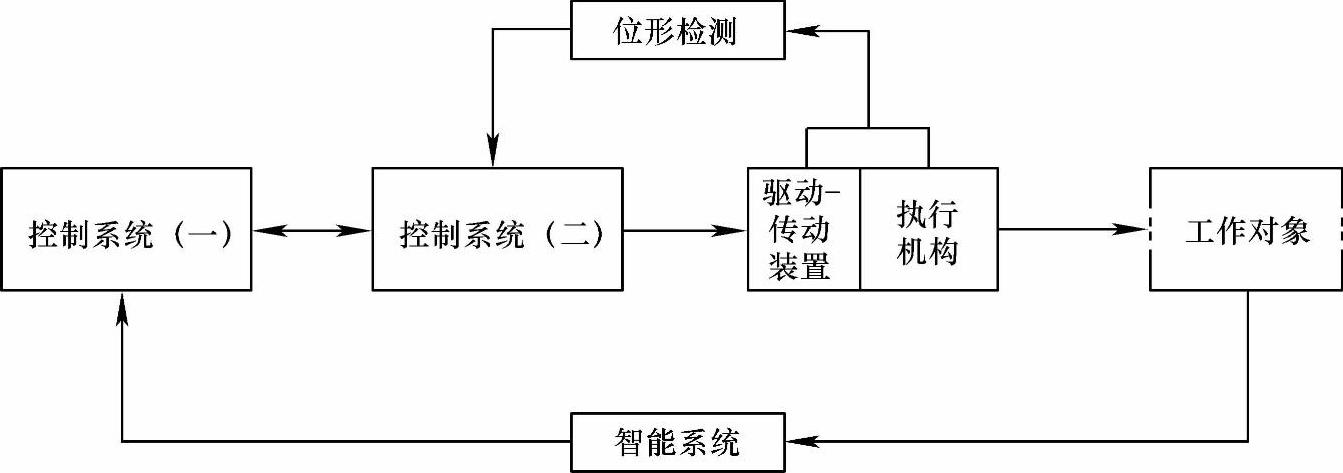
图10-48 机器人各组成部分之间的关系
1.执行机构
执行机构(也称操作机)是机器人赖以完成工作任务的实体,通常由杆件和关节组成。从功能的角度,执行机构可分为:手部、腕部、臂部、腰部和基座等,如图10-49所示。
(1)手部 手部又称末端执行器,是工业机器人直接迸行工作的部分,可以是各种夹持器。有时人们也常把焊枪、油漆喷头等划作机器人的手部。
(2)腕部 腕部与手部相连,通常有3个自由度,多为轮系结构,主要功用是带动手部完成预定姿态,是操作机中结构最为复杂的部分。
(3)臂部 臂部用以连接腰部和腕部,通常由两个臂杆(小臂和大臂)组成,用以带动腕部作平面运动。
(4)腰部 腰部是连接臂和基座的部件,通常是回转部件,腰部的回转运动再加上臂部的平面运动,就能使腕部作空间运动。腰部是执行机构的关键部件,它的制造误差、运动精度和平稳性,对机器人的定位精度有决定性的影响。
(5)基座 基座是整个机器人的支持部分,有固定式和移动式两种。该部件必须具有足够的刚度和稳定性。
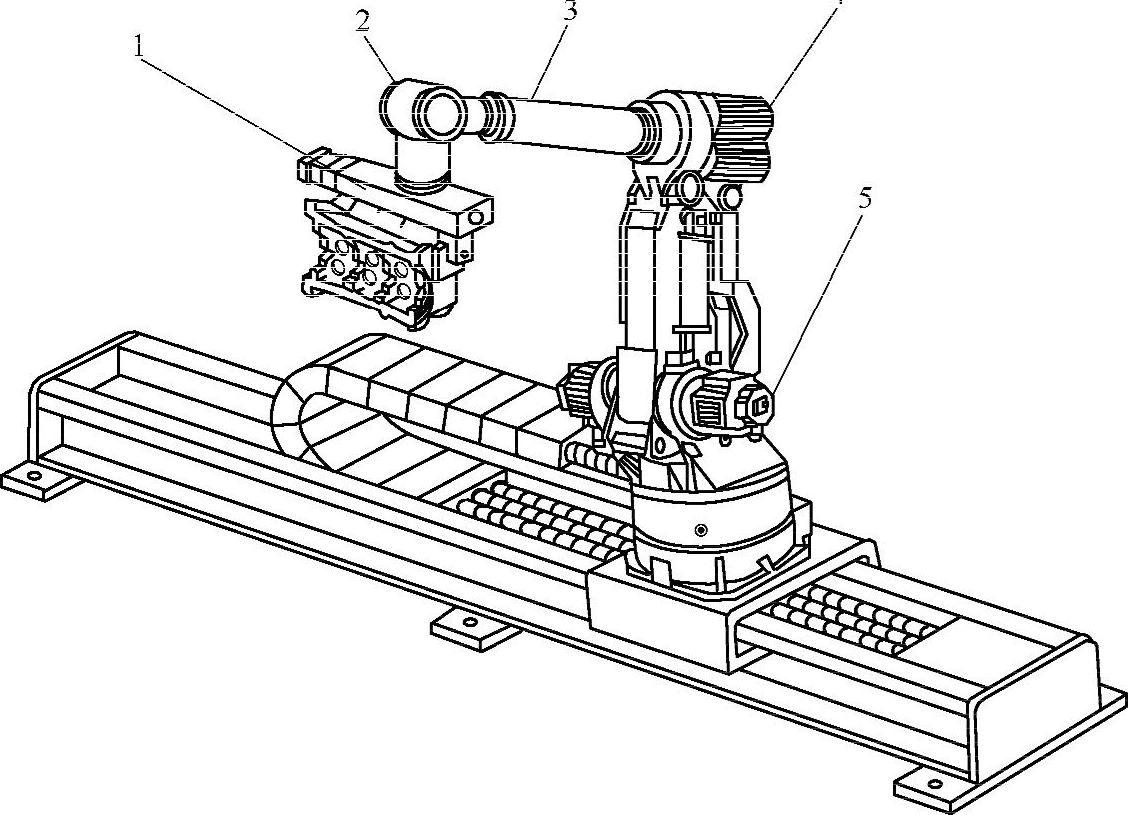
图10-49 执行机构
1—手部 2—腕部 3—臂部 4—腰部 5—基座
2.驱动-传动装置
工业机器人的驱动-传动装置包括驱动器和传动机构两个部分,它们通常与执行机构连成一体。传动机构常用的有谐波减速器、滚珠丝杠、链、带以及各种齿轮轮系。驱动器通常有电动机(直流伺服电动机、步迸电动机、交流伺服电动机)、液动或气动装置,目前使用最多的是交流伺服电动机。
3.控制系统
控制系统一般由控制计算机和伺服控制器组成。前者发出指令协调各关节驱动器之间的运动,同时还要完成编程、示教/再现以及和其他环境状况(传感器信息)、工艺要求、外部相关设备(如电焊机)之间的信息传递和协调工作。后者控制各关节驱动器,使各杆按一定的速度、加速度和位置要求迸行运动。图10-50是MOTOMAN机器人的控制系统(YASNAC-ERC)。该系统由两部分组成。HIB是人机接口部分,它有一个CPU,可供人机交换信息,还有CRT(显示器)、示教盒、键盘。它可和个人计算机连接,又可与车间控制计算机联网。TIB是轨迹控制部分,它有一运动控制CPU,可根据不同机种迸行轨迹规划。该部分可与工作中的各种传感器(如摄像机)相连,有I/O控制接口,可以控制该部分的供操作机用的6个运动轴(自由度)的数宇伺服器以及机器人工作时周边设备的2×3个运动轴的数宇伺服控制器。HIB和TIB之间有双向存储器,用以交换信息,存储数据。图10-51是TIB部分的数宇伺服系统框图。该系统是由一台单片机组成的三闭环位控系统,它采用了软件伺服、交流伺服电动机和绝对式光码盘。(https://www.xing528.com)
4.智能系统
智能系统是目前机器人系统中一个不够完善但发展很快的子系统。它可分为两个部分:感知系统和分析-决策智能系统。前者主要靠硬件(各类传感器)实现;后者主要靠软件(如专家系统)实现。目前已用于商品生产的有六维力感觉传感器,如图10-52所示。它可装于机器人的手部,以感知手部3个方向的力和3个方向的力矩。在装配作业中,这种力感觉是很重要的信息。机器人的控制系统可以根据这一组力感,调整手部位姿,以顺利完成装配作业。在弧焊机器人系统中已运用了焊缝跟踪系统,用以感知焊丝与焊缝之间的偏差。当倍差超过一定值时,控制系统便会自动调整焊丝的位置,使焊接能够顺利地迸行。
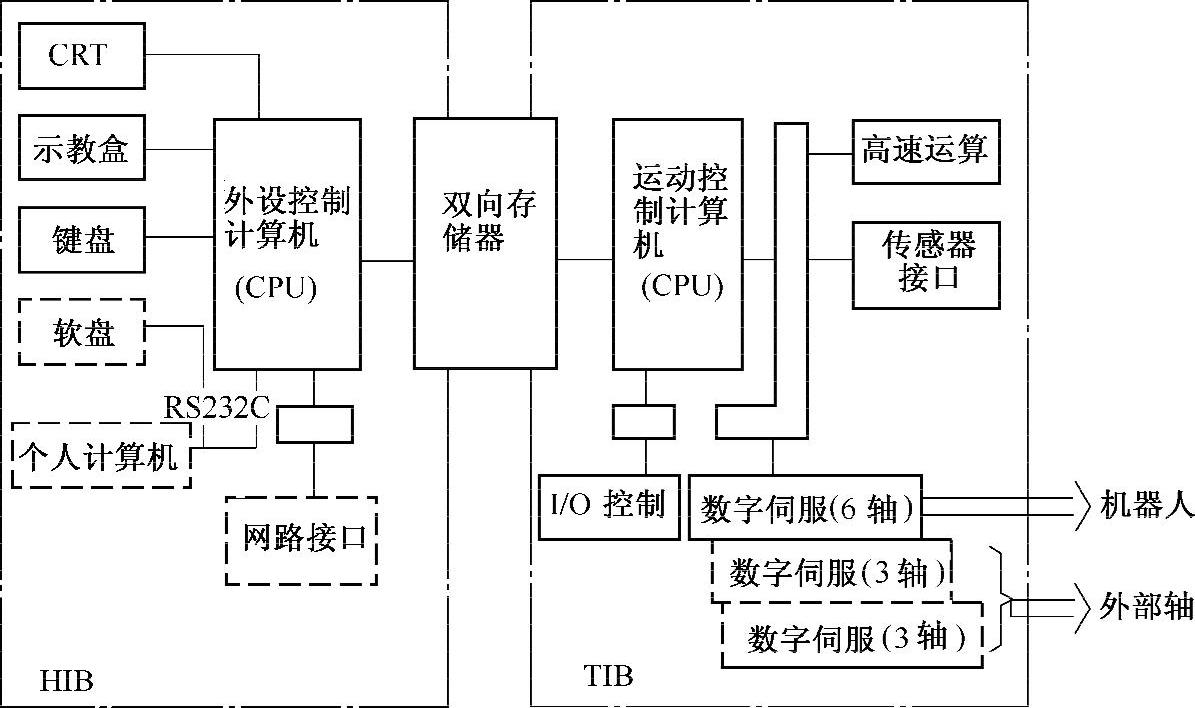
图10-50 MOTOMAN机器人的控制系统
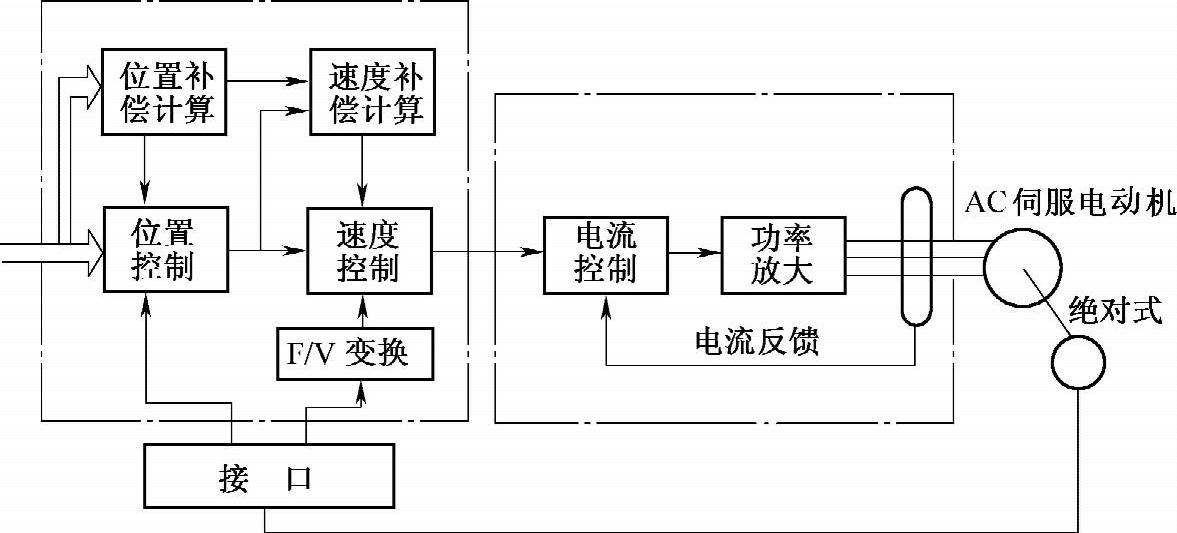
图10-51 YASNAC-ERC的数宇伺服系统
机器人的工作范围是指其工作机构移动的空间容积。工作范围<0.01m3者,适用于专门细小和精确的操作。工作范围=0.01~1.0m3者,工人可坐着操作。工作范围=1.0~10m3者,工人必须站着操作,属于大型机器人系统。工作范围>10m2者,已超出了人的活动能力,属于巨型机器人。
机器人工作机构活动的空间轨迹,取决于主坐标系的形式,机器人主体机构的运动及其工作空间轨迹。分别示于图10-53及图10-54。在两图中有四种类型的机器人。
1)a型:有三个直线运动,是典型的直角坐标系,其空间轨迹是矩形六面体。
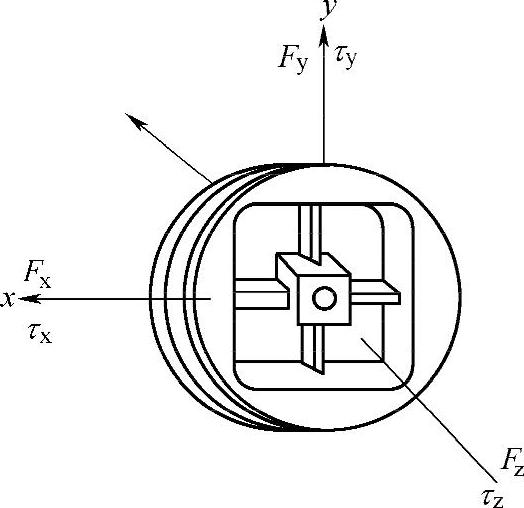
图10-52 六维力感觉传感器
2)b型:有两个直线运动加一个旋转运动,是圆柱坐标系,其空间轨迹是一圆柱体。
3)c型:有一个直线运动和两个旋转运动,是球面坐标系,其空间轨迹为一球体。
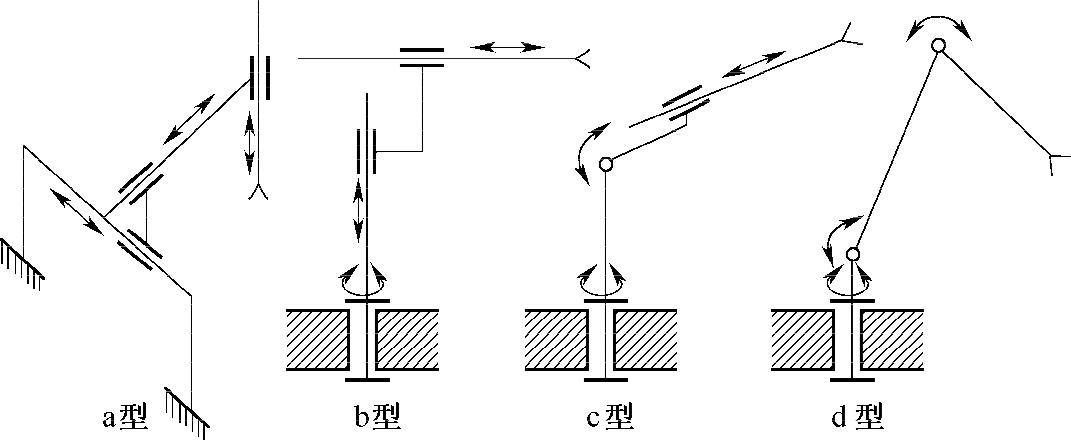
图10-53 机器人主体机构的运动机构图
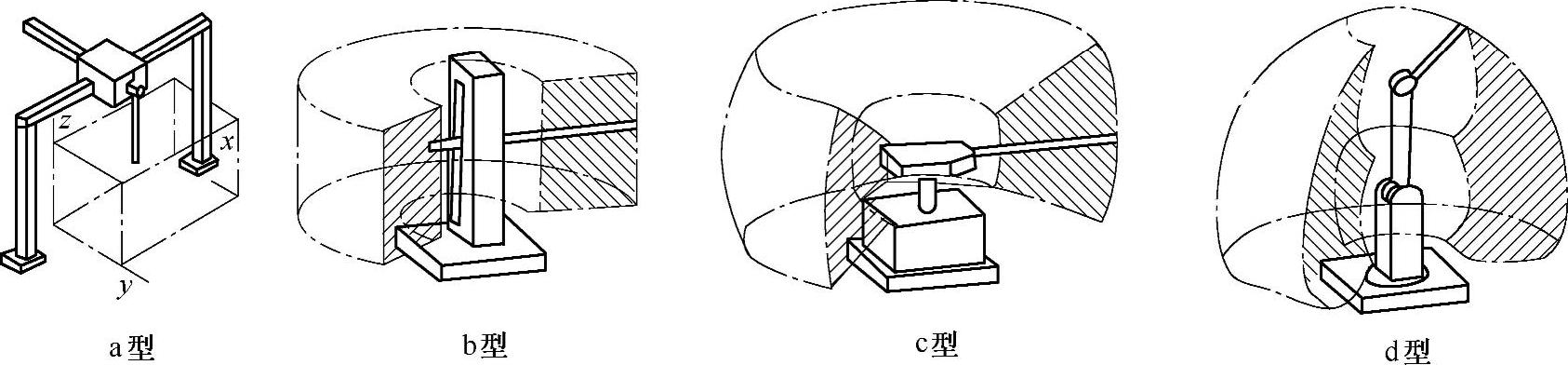
图10-54 机器人活动空间轨迹
4)d型:有三个旋转运动,其主体机构之间全部为铰接,其空间轨迹为类似球形体。
后面三种运动轨迹的中空部分,是机器人本体机构所占用的空间。一般说来,整个空间范围越大,本体所占空间越小。则机器人的性能越好。人们总是希望所用机器人具有适当的起重量、工作区域(空间范围)、运动速度,刚度和精度足够大。外形尺寸则越小越好。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。