



【摘要】:在yOi平面内加置一个支点,限制了零件沿x轴移动的可能。由此,我们可以得出定位的规律是:在直角空间坐标内,三个平面都是定位基准。在三个基准面中安置六个刚性支点与零件相接触,即可使零件处于确定的静定状态。设计时应当避免这种“超定位”现象。只有在工件长度很大为了加强其刚度时才可采用超定位,但应严格设置支承位置而不能使工件变形。图10-2 零件定位简图图10-2 零件定位简图
零件在空间可以有无限个位置可放。为了确定零件的具体相对位置,必须消除它对于直角坐标系活动的六个自由度。即在图10-2中所示的沿着三直角坐标轴的移动和转动。这样,零件的位置便被确定下来。
在xOy平面内的三个支点1~3,使矩形零件受到支托,同时也使其不能绕x轴和y轴转动,也不能沿i轴移动,限制了它的三个自由度。
在xOi平面内的两个支点4和6使得零件不能沿y轴移动和i轴转动,限制了它的两个自由度;零件此时可沿xOi平面移动。
在yOi平面内加置一个支点,限制了零件沿x轴移动的可能。于是零件便被确定了位置。由此,我们可以得出定位的规律是:
在直角空间坐标内,三个平面(xOy、xOi和yOi)都是定位基准。在三个基准面中安置六个刚性支点与零件相接触,即可使零件处于确定的静定状态。其中具有三个支点的平面称为安装基面,两个支点的平面为导向面,一个支点的平面为定程面(止推面)。(https://www.xing528.com)
在胎夹具上与工件定位基准相接触的支点称为定位支承,每一个基准上的定位支承数量应一定,平面上的定位支承至多可有三个,圆柱面则可设置四个,边端部定位则需两个支承(是定位直线)。超出这个数量时就不能保证支承与工件全部接触(只能施加外力使工件变形以接触全部支承)。设计时应当避免这种“超定位”现象。只有在工件长度很大为了加强其刚度时才可采用超定位,但应严格设置支承位置而不能使工件变形。
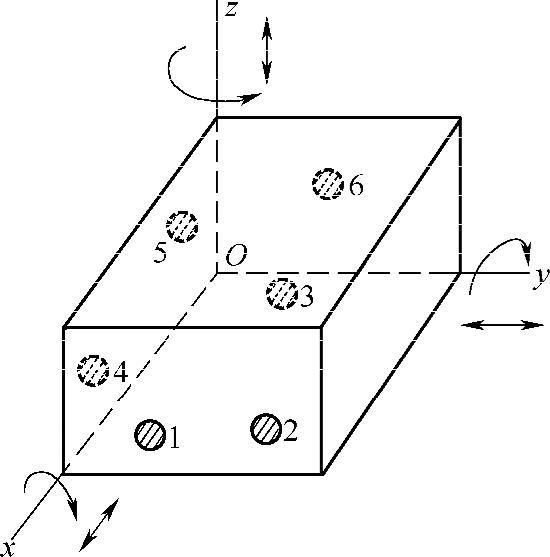
图10-2 零件定位简图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。