



1.设计顺序控制梯形图需要考虑的问题
控制系统的梯形图一般采用图2-32所示的典型结构,程序中的汉字是程序作者添加的。在对CPU组态时,设置MB1为系统存储器字节,M1.2的常开触点一直闭合,每次扫描都会执行公用程序。系统有自动和手动两种工作方式,自动方式和手动方式都需要执行的操作放在公用程序FC1中,公用程序还用于自动程序和手动程序相互切换的处理。M6.0是自动/手动切换开关,当它为1状态时调用手动程序FC2,为0状态时调用自动程序FC3。开始执行自动程序时,要求系统处于与自动程序的顺序功能图的初始步对应的初始状态。如果开机时系统没有处于初始状态,则应进入手动工作方式,用手动操作使系统进入初始状态后,再切换到自动工作方式,也可以设置使系统自动进入要求的初始状态的工作方式(见2.3.4节)。

图2-32 OB1中的程序
假设刚开始执行用户程序时,系统的机械部分已经处于要求的初始状态。在OB1中用仅在首次扫描循环时为1状态的M1.0将初始步对应的编程元件(例如图2-33中的M4.0)置为1状态,其余各步的编程元件置为0状态,为转换的实现做好准备。如果MB4没有设置保持功能,起动时它被自动清零,可以删除图2-33中的MOVE指令。

图2-33 OB1中的初始化电路
2.单序列的编程方法
(1)设计控制代表步的存储器位置位复位的电路的方法
在顺序功能图中,如果某一转换所有的前级步都是活动步,并且满足相应的转换条件,则转换实现,即该转换所有的后续步都变为活动步,该转换所有的前级步都变为不活动步。用该转换所有前级步对应的存储器位(M)的常开触点与转换对应的触点或电路串联,来使所有后续步对应的存储器位置位,和使所有前级步对应的存储器位复位。
置位和复位操作分别使用置位指令和复位指令。在任何情况下,代表步的存储器位的控制电路都可以用这一原则来设计,每一个转换对应一个这样的控制置位和复位的电路块,有多少个转换就有多少个这样的电路块。
这种设计方法特别有规律,梯形图与转换实现的基本规则之间有着严格的对应关系,在设计复杂的顺序功能图的梯形图时既容易掌握,又不容易出错。
(2)编程方法应用举例
在SETP 7 Basic中新建一个名为“小车控制顺序功能”的新项目,将CPU的型号选为CPU 1214C,操作后将图2-26的小车控制系统的顺序功能图重新画在图2-34中。
实现图中I0.1对应的转换需要同时满足两个条件,即该转换的前级步是活动步(M4.1为1状态)和转换条件满足(I0.1为1状态)。在梯形图中,用M4.1和I0.1的常开触点组成的串联电路来表示上述条件。该电路接通时,两个条件同时满足。此时应将该转换的后续步变为活动步,即用置位指令(S指令)将M4.2置位。还应将该转换的前级步变为不活动步,即用复位指令(R指令)将M4.1复位。
用上述的方法编写控制代表步的M4.0~M4.3的电路,每一个转换对应一个这样的电路(见图2-35)。

图2-34 顺序功能图

图2-35 OB1中的梯形图
使用这种编程方法时,不能将输出位的线圈与置位指令和复位指令并联,这是因为图2-35中控制置位、复位的串联电路接通的时间是相当短的,只有一个扫描周期。转换条件I0.1满足后,前级步M4.1被复位,下一个扫描循环周期M4.1和I0.1的常开触点组成的串联电路断开,而输出位Q的线圈至少应该在某一步对应的全部时间内被接通。所以应根据顺序功能图,用代表步的存储器位的常开触点或它们的并联电路来驱动输出位的线圈。
在制动延时步,M4.3为1状态,它的常开触点接通,使TON定时器开始定时。定时时间到时,定时器的Q输出端控制的M2.1变为1状态,转换条件满足,将转换到初始步M4.0。
3.选择序列编程方法
如果某一转换与并行序列的分支、合并无关,则它的前级步和后续步都只有一个,需要复位、置位的存储器位也只有一个,因此选择序列的分支与合并的编程方法实际上与单序列的编程方法完全相同。
如图2-36所示的顺序功能图中,除了I0.3与I0.6对应的转换以外,其余的转换均与并行序列的分支、合并无关,I0.0~I0.2对应的转换与选择序列的分支、合并有关,它们都只有一个前级步和一个后续步。与并行序列的分支、合并无关的转换对应的梯形图是非常标准的,每一个控制置位、复位的电路块都由前级步对应的一个存储器位的常开触点和转换条件对应的触点组成的串联电路、一条置位指令和一条复位指令组成。
4.并行序列的编程方法
如图2-36中步M4.2之后有一个并行序列的分支,当M4.2是活动步,并且转换条件I0.3满足时,步M4.3与步M4.5应同时变为活动步,这是用M4.2和I0.3的常开触点组成的串联电路使M4.3和M4.5同时置位来实现的。与此同时,步M4.2应变为不活动步,这是用复位指令来实现的。(https://www.xing528.com)
I0.6对应的转换之前有一个并行序列的合并,该转换实现的条件是所有的前级步(即步M4.4和M4.6)都是活动步,和转换条件I0.6满足。由此可知,应将M4.4、M4.6和I0.6的常开触点串联,作为控制后续步M4.0置位和前级步M4.4、M4.6复位的电路。
在图2-37所示顺序功能图中,转换的上面是并行序列的合并,转换的下面是并行序列的分支,该转换实现的条件是所有的前级步(即步M4.2和M4.4)都是活动步和转换条件I0.1+I0.3满足。因此应将M4.2、M4.4、I0.3的常开触点与I0.1的常闭触点组成的串并联电路,作为使M4.5、M4.7置位和使M4.2、M4.4复位的条件。

图2-36 选择序列与并行序列

图2-37 转换的同步实现
5.复杂的顺序功能图的调试方法
调试复杂的顺序功能图时,应充分考虑各种可能的情况,对系统的各种工作方式、顺序功能图中的每一条支路、各种可能的进展路线,都应逐一检查,不能遗漏。特别要注意并行序列中各子序列的第1步(如图2-36中的步M4.3和步M4.5)是否同时变为活动步,最后一步(步M4.4和步M4.6)是否同时变为不活动步。
发现问题后应及时修改程序,直到每一条进展路线上步的活动状态的顺序变化和输出点的变化都符合顺序功能图的规定。
将图2-39中的程序输入到OB1。调试时可以在监视表中用二进制格式监视MB4、QB0和IB0(见图2-38),在RUN模式时点击状态表工具栏上的 按钮,启动监控功能。第一次调试时从初始步转换到步M4.1,经过并行序列,最后返回初始步。第二次调试时从初始步开始,跳过步M4.1,进入步M4.2。经过并行序列,最后返回初始步。
按钮,启动监控功能。第一次调试时从初始步转换到步M4.1,经过并行序列,最后返回初始步。第二次调试时从初始步开始,跳过步M4.1,进入步M4.2。经过并行序列,最后返回初始步。

图2-38 监视表
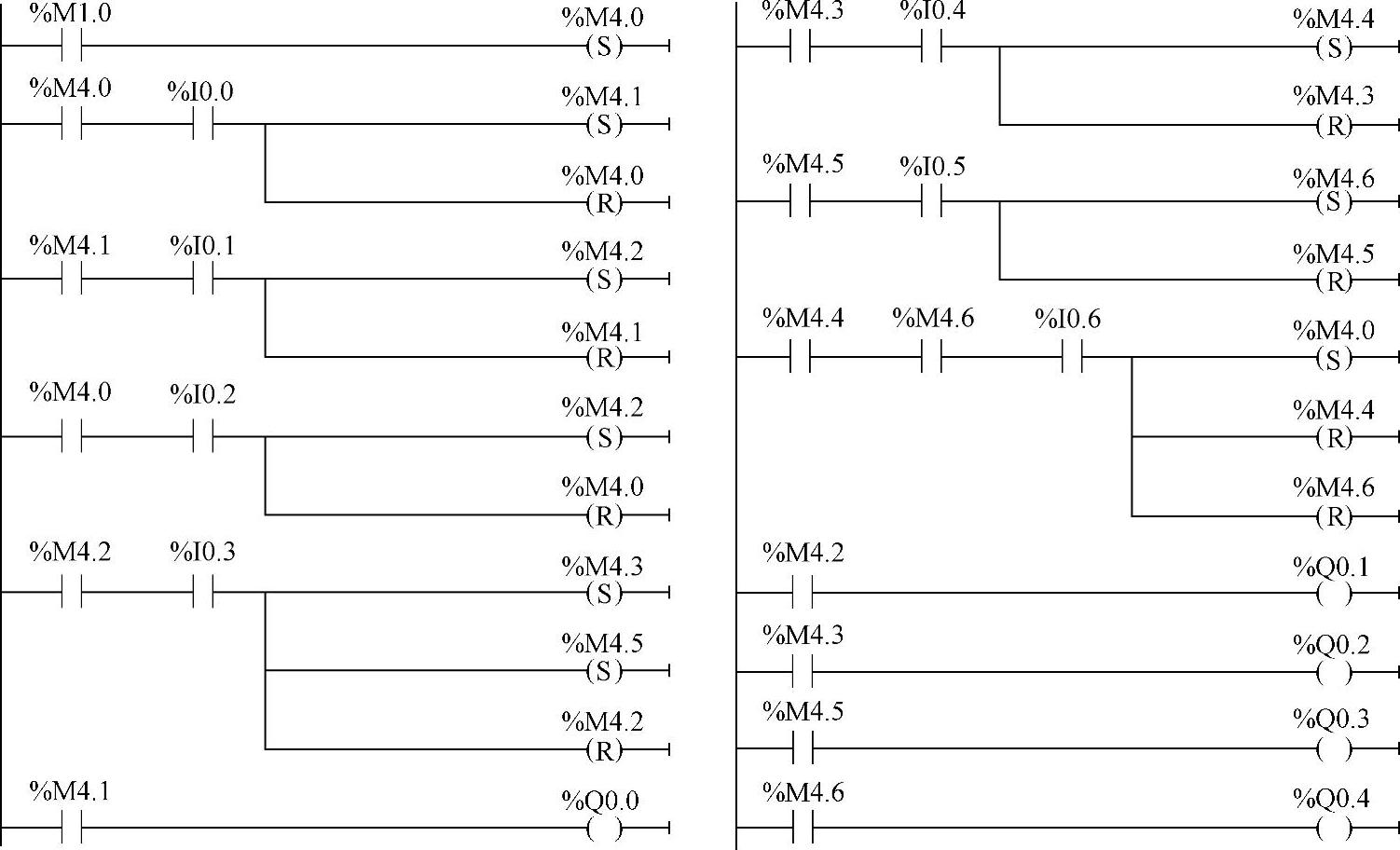
图2-39 选择序列与并行序列的梯形图
6.应用程序举例
【例2-2】钻床控制系统顺序功能图。
如图2-40是图2-30中的钻床控制系统的顺序功能图,图2-41是用置位复位指令编写的梯形图。
在STEP 7 Basic的项目视图中生成一个名为“钻床控制”的新项目,把CPU的型号设为CPU 1214C。将图2-41中的程序输入到OB1。
如图2-40中分别由M4.2~M4.4和M4.5~M4.7组成的两个单序列是并行工作的,设计梯形图时应保证这两个序列同时开始工作和同时结束,即两个序列的第一步M4.2和M4.5应同时变为活动步,两个序列的最后一步M4.4和M4.7应同时变为不活动步。
并行序列的分支的处理是很简单的,在图2-40中,当步M4.1是活动步,并且转换条件为I0.1为1状态时,步M4.2和M4.5同时变为活动步,两个序列开始同时工作。在梯形图中;用M4.1和I0.1的常开触点组成的串联电路来控制对M4.2和M4.5的同时置位,和对前级步M4.1的复位。
另一种情况是当步M5.0为活动步,并且转换条件为I0.6为1状态时,步M4.2和M4.5也应同时变为活动步,两个序列开始同时工作。在梯形图中,用M5.0的常开触点和I0.6的上升沿检测触点组成的串联电路,来控制对M4.2和M4.5的同时置位,和对前级步M5.0的复位。
在图2-40的并行序列合并处的转换有两个前级步M4.4和M4.7,根据转换实现的基本规则,当它们均为活动步并且转换条件满足时,将实现并行序列的合并。未钻完3对孔时,加计数器C0的实际计数值小于预置值3,其常闭触点闭合,转换条件 满足,将转换到步M5.0。在梯形图中,用M4.4、M4.7的常开触点和M2.2的常闭触点组成的串联电路将M5.0置位,使后续步M5.0变为活动步;同时用R指令将M4.4和M4.7复位,使前级步M4.4和M4.7变为不活动步。
满足,将转换到步M5.0。在梯形图中,用M4.4、M4.7的常开触点和M2.2的常闭触点组成的串联电路将M5.0置位,使后续步M5.0变为活动步;同时用R指令将M4.4和M4.7复位,使前级步M4.4和M4.7变为不活动步。
钻完3对孔时,C0的实际计数值等于预置值3,其常开触点闭合,转换条件.M2.2满足,将转换到步M5.1。在梯形图中,用M4.4、M4.7和M2.2的常开触点组成的串联电路将M5.1置位,使后续步M5.1变为活动步;同时用R指令将M4.4和M4.7复位,使前级步M4.4和M4.7变为不活动步。
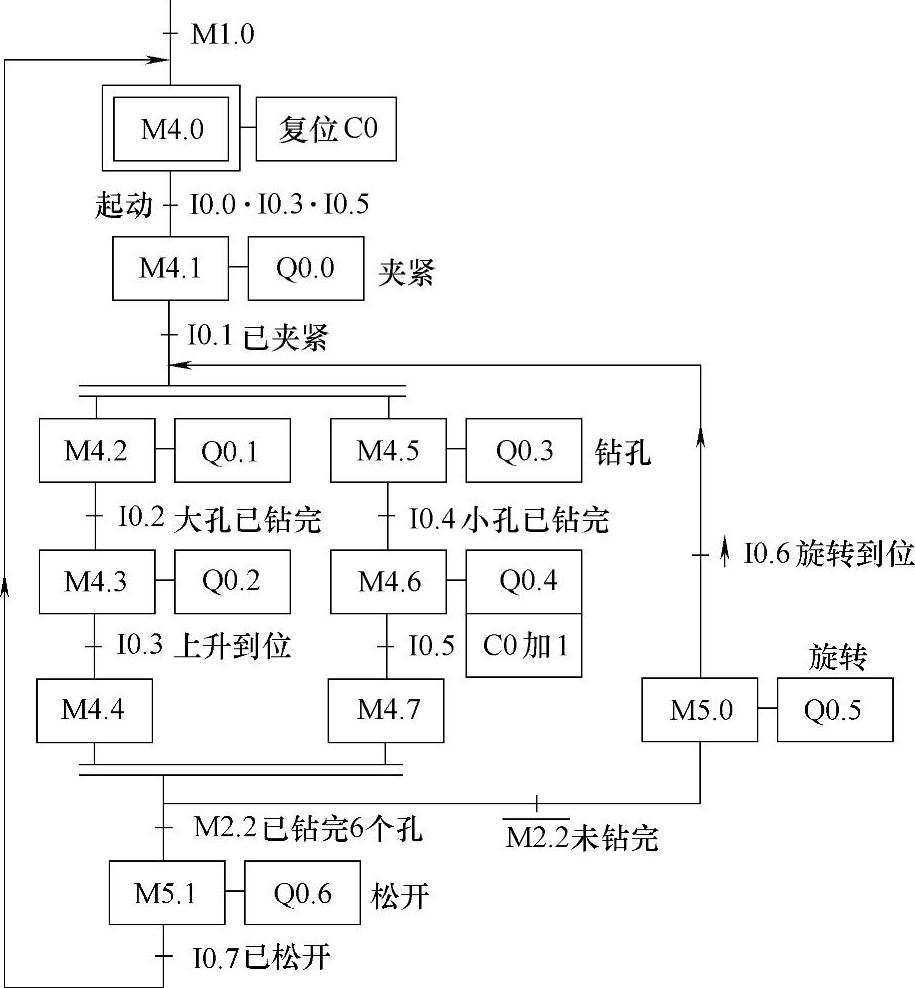
图2-40 专用钻床控制系统的顺序功能图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。