



在用经验设计法设计梯形图时,因为没有一套固定的方法和步骤可以遵循,并且由于程序的试探性和随意性,对于设计复杂系统的梯形图时,要用大量的中间单元来完成记忆和互锁等功能,由于需要考虑的因素很多,它们往往又交织在一起,分析起来非常困难,并且很容易遗漏一些应该考虑的问题。尤其在修改某一局部电路时,往往会出现“牵一发而动全身”的麻烦,对系统的其他部分产生意想不到的影响,因此梯形图的修改也很麻烦,往往花了很长的时间还得不到一个满意的结果。用经验法设计出的复杂的梯形图很难阅读,给系统的维修和改进带来了很大的困难。
顺序控制设计法是一种先进的设计方法,很容易被初学者接受,对于有经验的工程师,也会提高设计的效率,程序的调试、修改和阅读也很方便。所谓顺序控制,就是按照生产工艺预先规定的顺序,在各个输入信号的作用下,根据内部状态和时间的顺序,在生产过程中各个执行机构自动地有秩序地进行操作。
顺序功能图(Sequential Function Chart,SFC)是描述控制系统的控制过程、功能和特性的一种图形,也是设计PLC的顺序控制程序的有力工具。顺序功能图并不涉及所描述的控制功能的具体技术,它是一种通用的技术语言,可以供进一步设计和不同专业的人员之间进行技术交流之用。现在还有相当多的PLC(包括S7-1200)没有配备顺序功能图语言,但是可以用顺序功能图来描述系统的功能,根据它来设计梯形图程序。
1.步与动作
(1)步
顺序控制设计法最基本的思想是将系统的一个工作周期划分为若干个顺序相连的阶段,这些阶段称为步(Step),并用编程元件(例如位存储器M)来代表各步。步是根据输出量的状态变化来划分的,在任何一步之内,各输出量的ON/OFF状态不变,但是相邻两步输出量总的状态是不同的,步的这种划分方法使代表各步的编程元件的状态与各输出量的状态之间有着极为简单的逻辑关系。
顺序控制设计法用转换条件控制代表各步的编程元件,让它们的状态按一定的顺序变化,然后用代表各步的编程元件去控制PLC的各输出位,我们还是以小车控制程序为例,如图2-25所示。
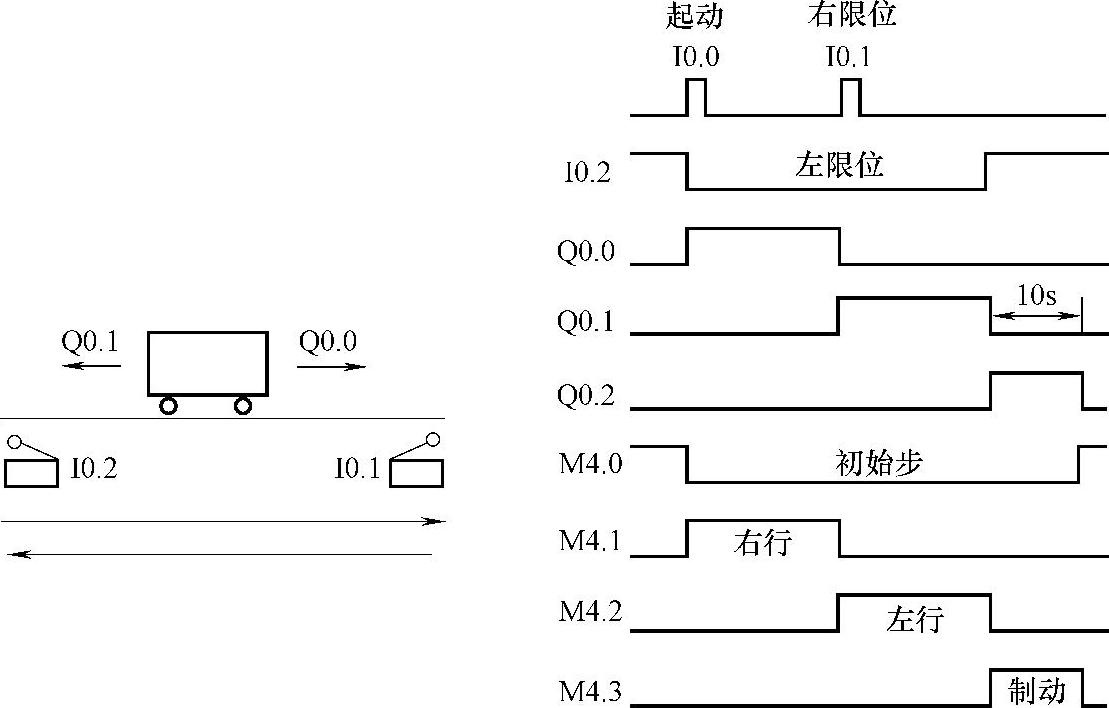
图2-25 系统示意图与波形图
在图2-25中,小车开始时停在最左边,限位开关I0.2为1状态。按下起动按钮,Q0.0变为1状态,小车右行。碰到右限位开关I0.1时,Q0.0变为0状态,Q0.1变为1状态,小车改为左行。返回起始位置时,Q0.1变为0状态,小车停止运行,同时Q0.2变为1状态,使制动电磁铁线圈通电,接通延时定时器开始定时。定时时间到,制动电磁铁线圈断电,系统返回初始状态。
根据Q0.0~Q0.2的ON/OFF状态的变化,显然可以将上述工作过程分为3步,分别用M4.1~M4.3来代表这3步,另外还设置了一个等待起动的初始步。图2-26是描述该系统的顺序功能图,图中用矩形方框表示步,方框中可以用数字表示该步的编号,也可以用代表该步的编程元件的地址作为步的编号,例如M4.0等。为了便于将顺序功能图转换为梯形图,用代表各步的编程元件的地址作为步的代号,并用编程元件的地址来标注转换条件和各步的动作或命令。
(2)初始步
与系统的初始状态相对应的步称为初始步,初始状态一般是系统等待起动命令的相对静止的状态。初始步用双线方框表示,每一个顺序功能图至少应该有一个初始步。
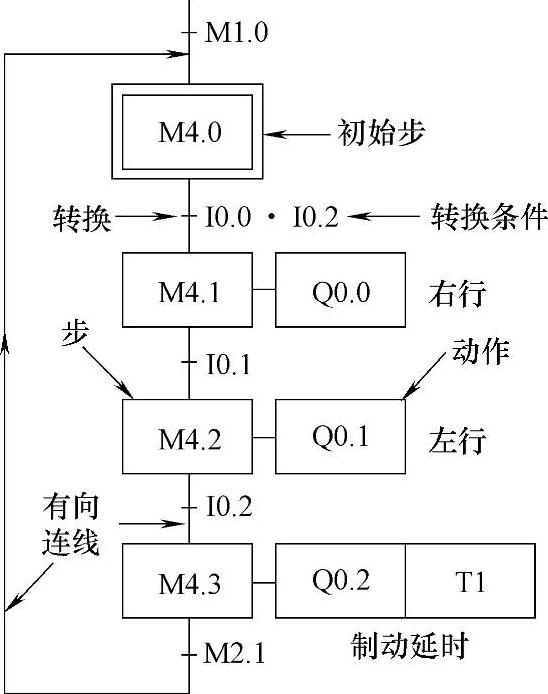
图2-26 顺序功能图
(3)活动步
当系统正处于某一步所在的阶段时,该步处于活动状态,称该步为“活动步”。步处于活动状态时,执行相应的非存储型动作;处于不活动状态时,则停止执行。
(4)与步对应的动作或命令
可以将一个控制系统划分为被控系统和施控系统,例如在数控车床系统中,数控装置是施控系统,而车床是被控系统。对于被控系统,在某一步中要完成某些“动作”(Action),对于施控系统,在某一步中则要向被控系统发出某些“命令”(Command)。为了叙述方便,下面将命令或动作统称为动作,并用矩形框中的文字或变量表示动作,该矩形框应与它所在的步对应的方框相连。如果某一步有几个动作,可以用图2-27中的两种画法来表示,但是并不隐含这些动作之间的任何顺序。应清楚地表明动作是存储型的还是非存储型的。
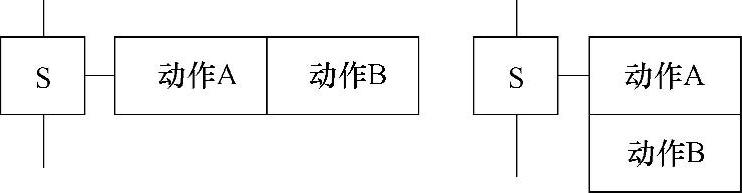
图2-27 动作
在图2-26中的Q0.0~Q0.2均为非存储型动作,例如在步M4.1为活动步时,动作Q0.0为1状态,步M4.1为不活动步时,动作Q0.0为0状态。步与它的非存储型动作的波形完全相同。
某些动作在连续的若干步都应为1状态,可以在顺序功能图中,用动作的修饰词“S”(见表2-7)将它在应为1状态的第一步置位,用动作的修饰词“R”将它在应为1状态的最后一步的下一步复位为0状态。这种动作是存储型动作,在程序中用置位、复位指令来实现。在图2-18中,定时器T1的IN输入在步M4.3为活动步时为1状态,步M4.3为不活动步时为0状态,从这个意义上来说,T1的IN输入相当于步M4.3的一个非存储型动作,所以将T1放在步M4.3的动作框内。
表2-7 动作的修饰词
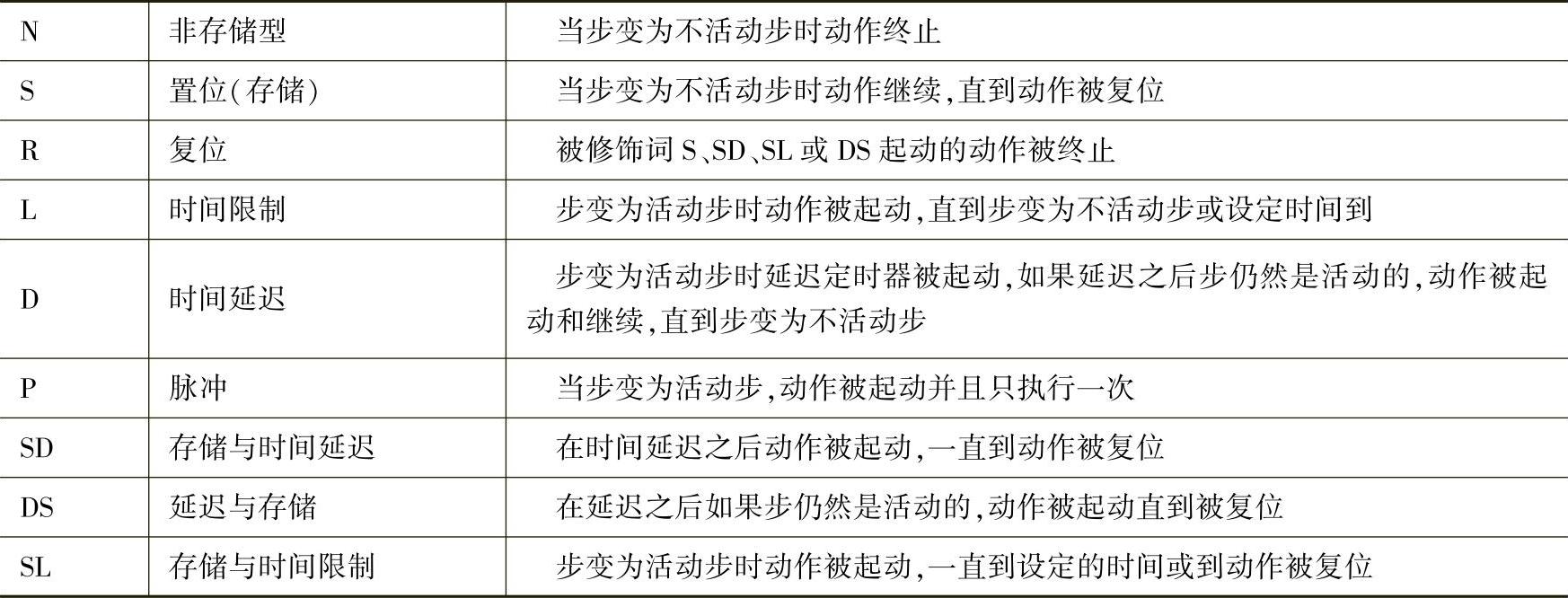
使用动作的修饰词(如前表2-7所示),可以在一步中完成不同的动作。修饰词允许在不增加逻辑的情况下控制动作。例如,可以使用修饰词L来限制配料阀打开的时间。
2.有向连线与转换条件
(1)有向连线
在顺序功能图中,随着时间的推移和转换条件的实现,将会发生步的活动状态的进展,这种进展按有向连线规定的路线和方向进行。
在画顺序功能图时,将代表各步的方框按它们成为活动步的先后次序顺序排列,并用有向连线将它们连接起来。步的活动状态习惯的进展方向是从上到下或从左至右,在这两个方向有向连线上的箭头可以省略。如果不是上述的方向,则应在有向连线上用箭头注明进展方向。为了更易于理解,在可以省略箭头的有向连线上也可以加箭头。
如果在画图时有向连线必须中断,(例如在复杂的图中,或用几个图来表示一个顺序功能图时),应在有向连线中断之处标明下一步的标号和所在的页数,例如“步80、10页”。
(2)转换
转换用有向连线上与有向连线垂直的短画线来表示,转换将相邻两步分隔开。步的活动状态的进展是由转换的实现来完成的,并与控制过程的发展相对应。
(3)转换条件
使系统由当前步进入下一步的信号称为转换条件,转换条件可以是外部的输入信号,例如按钮、指令开关、限位开关的接通或断开等;也可以是PLC内部产生的信号,例如定时器、计数器常开触点的接通等,转换条件还可以是若干个信号的与、或、非逻辑组合。
转换条件可以用文字语言、布尔代数表达式或图形符号标注在表示转换的短线旁,使用得最多的是布尔代数表达式(见图2-28)。

图2-28 转换与转换条件
转换条件I0.0和I0.0分别表示当输入信号I0.0为1状态和0状态时转换实现。符号↑I0.0和↓I0.0分别表示当I0.0从0状态到1状态和从1状态到0状态时转换实现。实际上即使不加符号“↑”,转换一般也是在信号的上升沿实现的,因此一般不加“↑”。
图2-28用高电平表示步M2.1为活动步,反之则用低电平表示。转换条件I0.0·I2.1表示I0.0的常开触点与I2.1的常闭触点同时闭合,在梯形图中则用两个触点的串联来表示这样一个“与”逻辑关系。
图2-26中步M4.3下面的转换条件M2.1对应于定时器T1的Q输出信号,T1的定时时间到时,转换条件满足。在顺序功能图中,只有当某一步的前级步是活动步,该步才有可能变成活动步。如果用没有断电保持功能的编程元件来代表各步,进入RUN工作方式时,它们均处于0状态。
在对CPU组态时如果设置默认的MB1为系统存储器字节,则必须用开机时接通一个扫描周期的M1.0的常开触点作为转换条件,将初始步预置为活动步(见图2-26),否则因为顺序功能图中没有活动步,系统将无法工作。如果系统有自动、手动两种工作方式,顺序功能图是用来描述自动工作过程的,这时还应在系统由手动工作方式进入自动工作方式时,用一个适当的信号将初始步置为活动步(见2.3.4节)。
3.顺序功能图的组成
(1)单序列(https://www.xing528.com)
单序列由一系列相继激活的步组成,每一步的后面仅有一个转换,每一个转换的后面只有一个步(见图2-29a),单序列的特点是没有下述的分支与合并。
(2)选择序列
选择序列的开始称为分支(见图2-29b),转换符号只能标在水平连线之下。如果步5是活动步,并且转换条件h为1状态,则发生由步5→步8的进展。如果步5是活动步,并且k为1状态,则发生由步5→步10的进展。如果将选择条件k改为k·h,则当k和h同时为1状态时,将优先选择h对应的序列,一般只允许同时选择一个序列。
选择序列的结束称为合并(见图2-29b),几个选择序列合并到一个公共序列时,用需要重新组合的序列相同数量的转换符号和水平连线来表示,转换符号只允许标在水平连线之上。如果步9是活动步,并且转换条件j为1状态,则发生由步9→步12的进展。如果步11是活动步,并且n为1状态,则发生由步11→步12的进展。
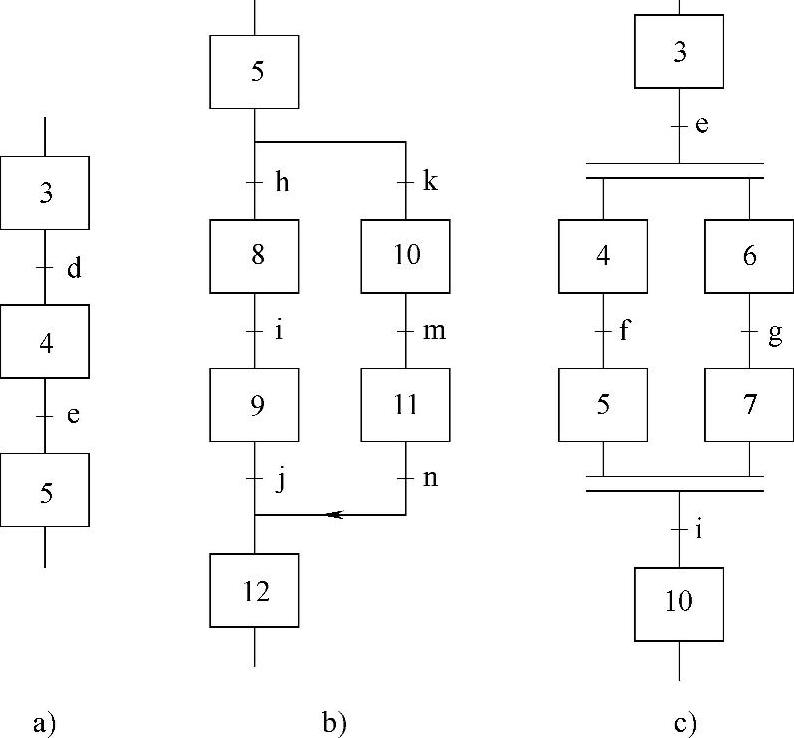
图2-29 单序列、选择序列与并行序列
(3)并行序列
并行序列用来表示系统的几个同时工作的独立部分的工作情况。并行序列的开始称为分支(见图2-29c)。
当转换的实现导致几个序列同时激活时,这些序列称为并行序列。当步3是活动的,并且转换条件e为1状态,步4和步6同时变为活动步,同时步3变为不活动步。为了强调转换的同步实现,水平连线用双线表示。步4和步6被同时激活后,每个序列中活动步的进展将是独立的。在表示同步的水平双线之上,只允许有一个转换符号。
并行序列的结束称为合并(见图2-29c),在表示同步的水平双线之下,只允许有一个转换符号。当直接连在双线上的所有前级步(步5和步7)都处于活动状态,并且转换条件i为1状态时,才会发生步5和步7到步10的进展,即步5和步7同时变为不活动步,而步10变为活动步。
(4)顺序功能图举例
【例2-1】某专用钻床用来加工圆盘状零件上均匀分布的6个孔,见图2-30所示。上面是侧视图,下面是工件的俯视图。
在进入自动运行之前,两个钻头应在最上面,上限位开关I0.3和I0.5为1状态,系统处于初始步,加计数器C0被复位,实际计数值CV被清零。用存储器位M来代表各步,顺序功能图中包含了选择序列和并行序列。操作人员放好工件后,按下起动按钮I0.0,转换条件I0.0·I0.3·I0.5满足,由初始步转换到步M4.1,Q0.0变为1状态,工件被夹紧。夹紧后压力继电器I0.1为1状态,由步M4.1转换到步M4.2和M4.5,Q0.1和Q0.3使两只钻头同时开始向下钻孔。大钻头钻到由限位开关I0.2设定的深度时,进入步M4.3,Q0.2使大钻头上升,升到由限位开关I0.3设定的起始位置时停止上升,进入等待步M4.4。小钻头钻到由限位开关I0.4设定的深度时,进入步M4.6,Q0.4使小钻头上升,设定值为3的加计数器C0的实际计数值加1。升到由限位开关I0.5设定的起始位置时停止上升,进入等待步M4.7。
C0加1后的实际计数值为1,C0的Q输出端控制的M2.2的常闭触点闭合,转换条件M2.2满足。两个钻头都上升到位后,将转换到步M5.0,Q0.5使工件旋转120°,旋转到位时I0.6为1状态,又返回步M4.2和M4.5,开始钻第2对孔。3对孔都钻完后,实际计数值为3,其Q输出端控制的M2.2变为1状态,转换到步M5.1,Q0.6使工件松开。松开到位时,限位开关I0.7为1状态,系统返回初始步M4.0。
因为要求两个钻头向下钻孔和钻头提升的过程同时进行,故采用并行序列来描述上述的过程。由M4.2~M4.4和M4.5~M4.7组成的两个单序列分别用来描述大钻头和小钻头的工作过程。在步M4.1之后,有一个并行序列的分支。当M4.1为活动步,并且转换条件I0.1得到满足(I0.1为1状态),并行序列的两个单序列中的第1步(步M4.2和M4.5)同时变为活动步。
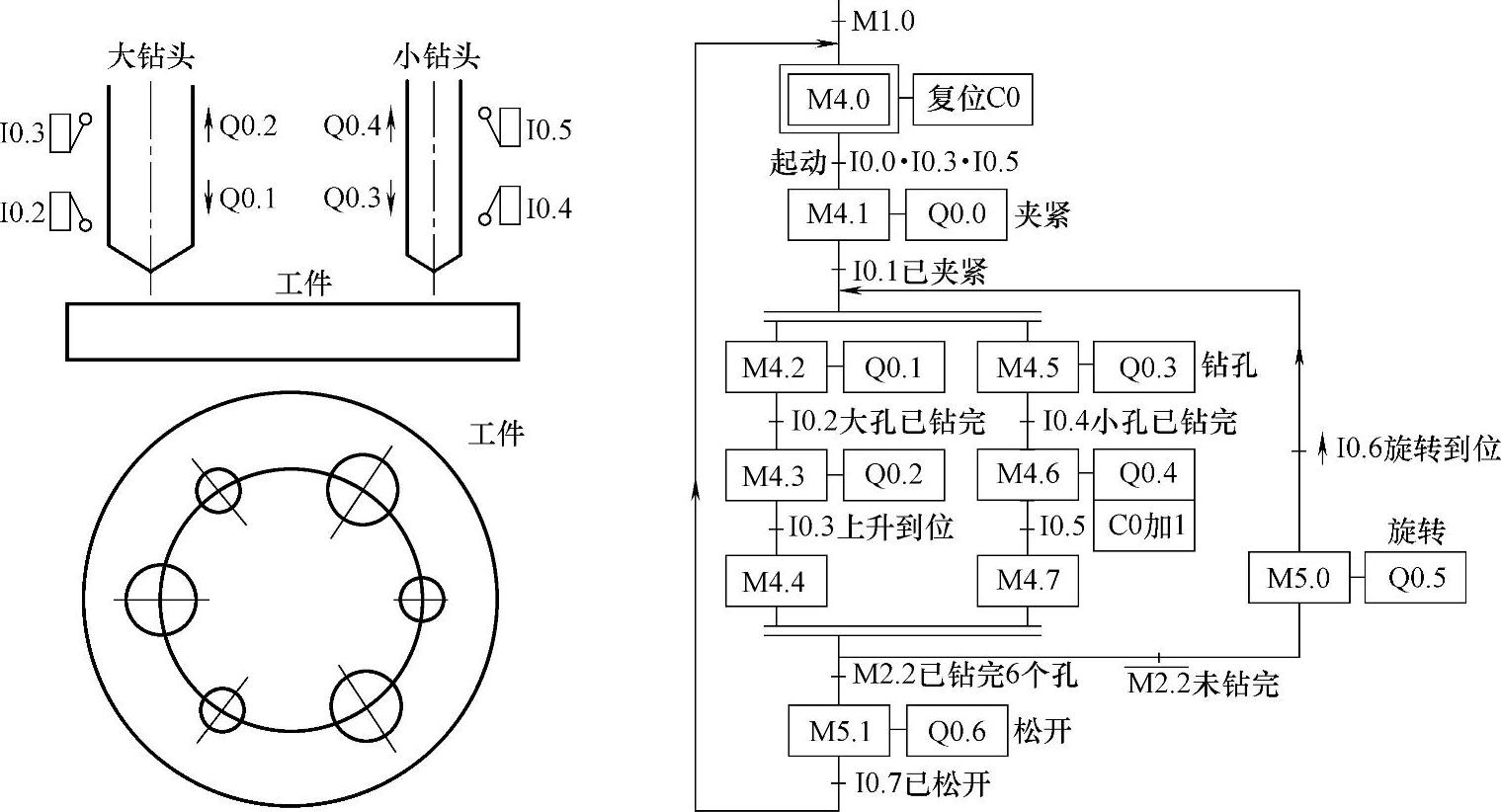
图2-30 专用钻床零件图及控制系统的顺序功能图
此后两个单序列内部各步的活动状态的转换是相互独立的,例如大孔或小孔钻完时的转换一般不是同步的。
两个单序列的最后1步(步M4.4和M4.7)应同时变为不活动步。但是两个钻头一般不会同时上升到位,不可能同时结束运动,所以设置了等待步M4.4和M4.7,它们用来同时结束两个并行序列。当两个钻头均上升到位,限位开关I0.3和I0.5分别为1状态,大、小钻头两个子系统分别进入两个等待步,并行序列将会立即结束。在步M4.4和M4.7之后,有一个选择序列的分支。没有钻完3对孔时,M2.2的常闭触点闭合,转换条件 满足,如果两个钻头都上升到位,将从步M4.4和M4.7转换到步M5.0。如果已经钻完了3对孔,M2.2的常开触点闭合,转换条件M2.2满足,将从步M4.4和M4.7转换到步M5.1。
满足,如果两个钻头都上升到位,将从步M4.4和M4.7转换到步M5.0。如果已经钻完了3对孔,M2.2的常开触点闭合,转换条件M2.2满足,将从步M4.4和M4.7转换到步M5.1。
在步M4.1之后,有一个选择序列的合并。当步M4.1为活动步,而且转换条件I0.1得到满足(I0.1为1状态),将转换到步M42和M4.5。当步M5.0为活动步,而且转换条件↑I0.6得到满足,也会转换到步M4.2和M4.5。
4.绘制顺序功能图的注意事项
(1)顺序功能图转换实现的条件
在顺序功能图中,步的活动状态的进展是由转换的实现来完成的。转换实现必须同时满足两个条件:
1)该转换所有的前级步都是活动步。
2)相应的转换条件得到满足。
这两个条件是缺一不可的,这样才能防止误操作,保证系统严格地按顺序功能图规定的顺序工作。
(2)转换实现应完成的操作
转换实现时应完成以下两个操作:
1)使所有由有向连线与相应转换符号相连的后续步都变为活动步。
2)使所有由有向连线与相应转换符号相连的前级步都变为不活动步。
以上规则可以用于任意结构中的转换,其区别如下:在单序列和选择序列中,一个转换仅有一个前级步和一个后续步。在并行序列的分支处,转换有几个后续步(见图2-29c),在转换实现时应同时将它们对应的编程元件置位。在并行序列的合并处,转换有几个前级步,它们均为活动步时才有可能实现转换,在转换实现时应将它们对应的编程元件全部复位。
如果转换的前级步或后续步不止一个,转换的实现称为同步实现(见图2-31)。为了同步实现,有向连线的水平部分用双线表示。
在梯形图中,用编程元件(例如M)代表步,当某步为活动步时,该步对应的编程元件为1状态。当该步之后的转换条件满足时,转换条件对应的触点或电路接通,因此可以将该触点或电路与代表所有前级步的编程元件的常开触点串联,作为与转换实现的两个条件同时满足对应的电路。
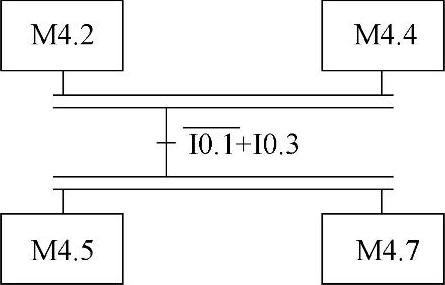
图2-31 转换的同步实现
以图2-31为例,转换条件的布尔代数表达式为I0.1+I0.3,它的两个前级步对应于M4.2和M4.4,应将M4.2、M4.4的常开触点组成的串联电路与I0.3的常开触点和I0.1的常闭触点组成的并联电路串联,作为转换实现的两个条件同时满足对应的电路。在梯形图中,该电路接通时,应使代表前级步的M4.2和M4.4复位(变为0状态并保持),同时使代表后续步的M4.5和M4.7置位(变为1状态并保持),完成以上任务的电路将在下一节中介绍。
(3)绘制顺序功能图时的注意事项
下面是针对绘制顺序功能图时常见的错误提出的注意事项:
1)两个步绝对不能直接相连,必须用一个转换将它们分隔开。
2)两个转换也不能直接相连,必须用一个步将它们分隔开。第1条和第2条可以作为检查顺序功能图是否正确的判据。
3)顺序功能图中的初始步一般对应于系统等待起动的初始状态,这一步可能没有什么输出处于ON状态,因此有的初学者在画顺序功能图时很容易遗漏这一步。初始步是必不可少的,一方面因为该步与它的相邻步相比,从总体上说输出变量的状态各不相同;另一方面如果没有该步,无法表示初始状态,系统也无法返回等待起动的停止状态。
4)自动控制系统应能多次重复执行同一工艺过程,因此在顺序功能图中一般应有由步和有向连线组成的闭环,即在完成一次工艺过程的全部操作之后,应从最后一步返回初始步,系统停留在初始状态(单周期操作,见图2-25),在连续循环工作方式时,应从最后一步返回下一工作周期开始运行的第一步(见图2-30)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。