



从尺寸公差转换为几何公差是一个很好的应用几何公差的方法。标注时,可以先标注尺寸公差,然后再转换成几何公差。例如,把图10-18中的尺寸公差转换为几何公差的方法如下:
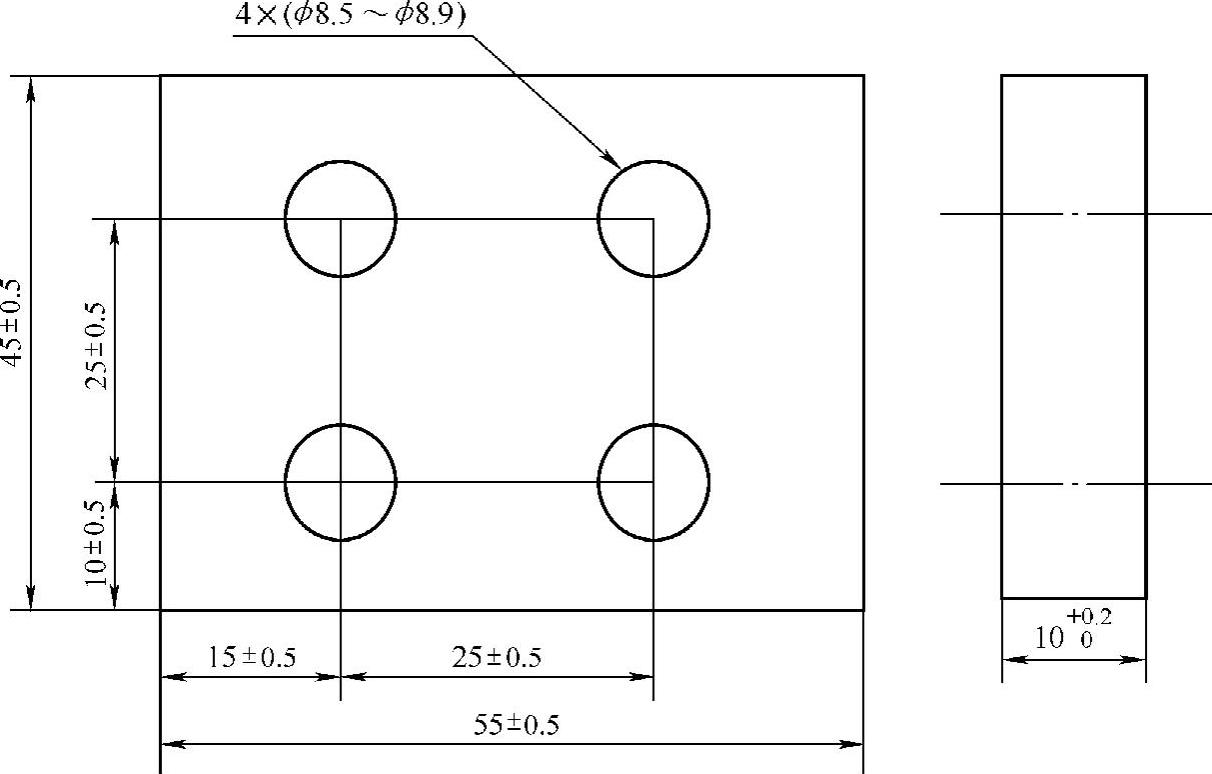
图10-18 一个尺寸公差约束的零件图
转换之前,要先分析一下该图样。除了厚度尺寸10mm可以延用到几何公差外,其他的尺寸都需要转换,包括本体的外形轮廓(轮廓度)、孔的位置度(位置度公差)和孔的尺寸公差(可以直接应用),考虑降低成本,也可以尝试使用MMC条件。
对于位置度公差,从尺寸公差的矩形公差带到几何公差的圆形公差带的转换,其法则就是尺寸公差带的矩形对角线等于几何公差带的直径尺寸(若影响壁厚,不适用),所以 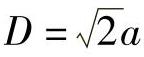 。其中,D为几何公差带直径;a为矩形公差带边长。公差转换的原理如图10-19 所示。
。其中,D为几何公差带直径;a为矩形公差带边长。公差转换的原理如图10-19 所示。
(1)设置基准(图10-20) 因为55mm×45mm的大平面为此零件的装配面(也称为功能面),所以选取右侧视图定义主定位A,然后在A的垂直面上选取次定位和第三定位,由于基准A为主定位,无需基准参考,所以可以直接用形状公差——平面度来控制。这里应用几何公差的第一法则,尺寸公差直接作为几何公差。由于55mm的边更长,能形成一个更长的直线,这样次定位更加稳定,所以选取55mm长的边为次定位,定义为B,在另一个垂直面上45mm的边可以作为第三定位,定义为C。
图10-19 公差转换的原理
 (https://www.xing528.com)
(https://www.xing528.com)
图10-20 设置基准
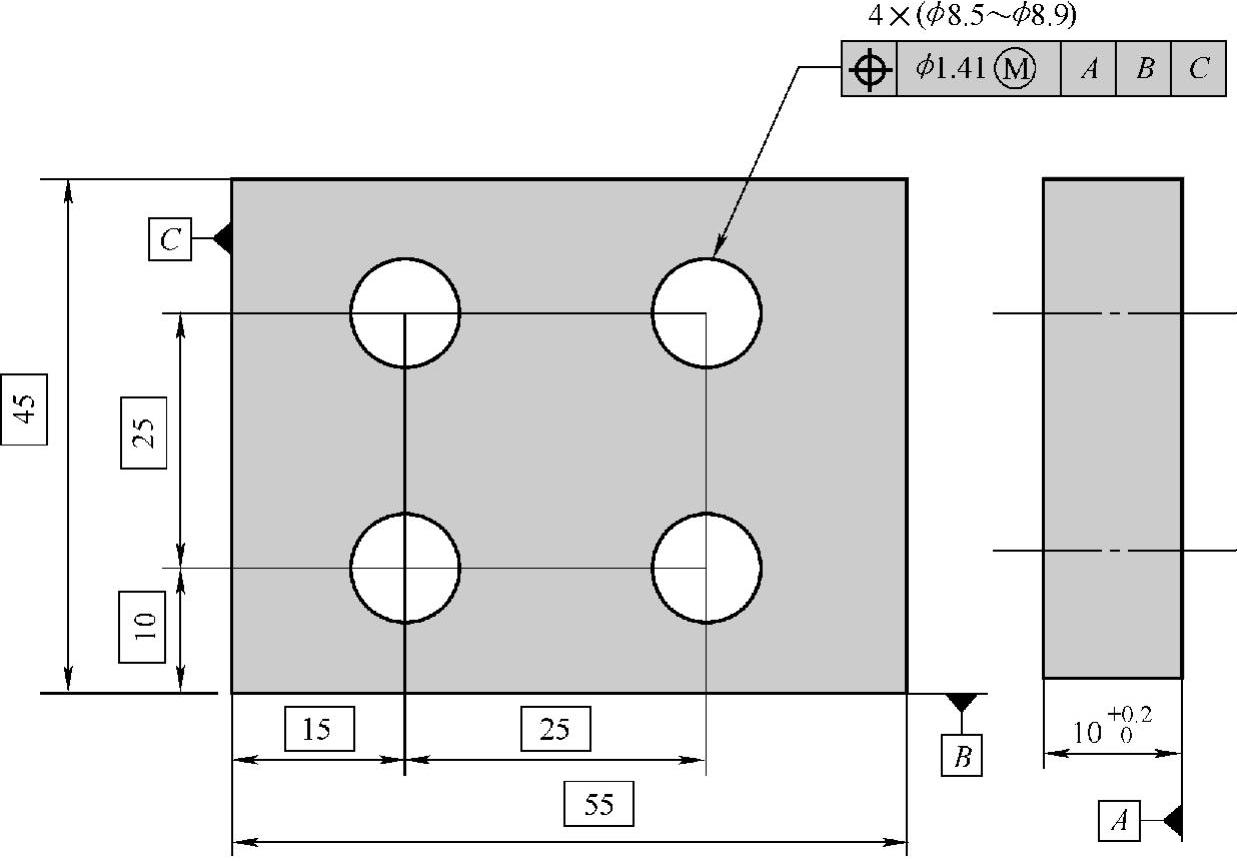
图10-21 确定公称尺寸和位置度公差
(2)确定公称尺寸和位置度公差(图10-21) 由公式  可得
可得  1.41mm,所以位置度的公差为1.41mm。
1.41mm,所以位置度的公差为1.41mm。
原位置度公差变为公称尺寸,应用位置度可以用MMC条件修正(节省成本),公差的应用框架是在基准A、B和C定位下。
(3)确定轮廓度(图10-22) 由于零件轮廓的尺寸公差是等边公差,故可以直接应用。应注意其公差基准设置是在基准A、B和C定位的框架下。

图10-22 确定轮廓度
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。