



基准是理论上精确的点、线和面。这些点、线和面存在于三个互相垂直的相交面上,这三个垂直面被称为基准参考框架。图3-4说明了一个零件在基准框架内的6个自由度。基准在数模上或图样上称为理论基准特征,在零件上称为基准特征,在检具和工装上称为模拟基准(检具上的支撑或定位)。基准特征和基准模拟在实际制造过程中都存在误差,通常基准模拟的公差带是零件基准公差带的1/10(通常公差带考虑5%的制造误差,以及5%的磨损保留量)。
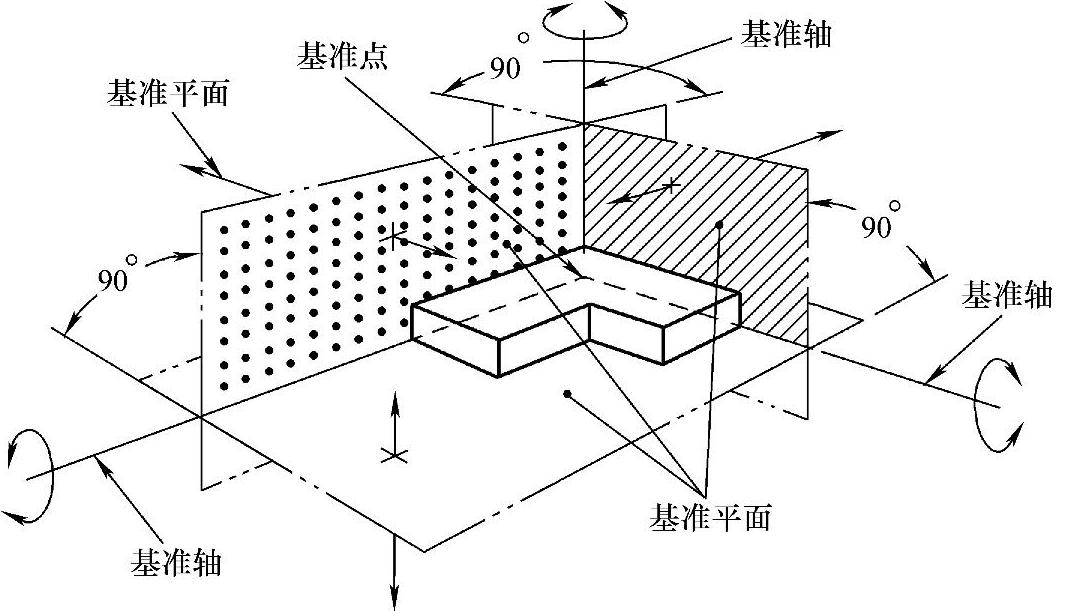
图3-4 一个零件在基准框架内的6个自由度
基准的目的就是去除一个零件在空间中的6个自由度(平移和旋转),当一个零件在空间中的6个自由度被完全约束,则零件上的每一个点、线和面都有一个确定的坐标,才能开始定义一个零件上的各个特征。
图3-5展示了基准的三个表示状态。数模上的基准是理论的几何特征,公差带为零。零件上和检具上的基准在实际生产中必然存在误差,但是零件上基准特征的波峰、波谷大于检具。这意味着检具的公差要小于零件的公差,通常为零件公差带的10%,也就是使用检具检测的零件公差带实际只应用了90%。
基准框架实际就是直角坐标系,这个直角坐标系由三个基准面组成。当零件放置在第一个坐标平面X(称为第一基准面或主基准面)上,最多可以约束3个自由度。如图3-6所示,这3个自由度为Z方向的平移,以及X轴和Y轴的旋转。为约束这3个自由度,至少为面接触,即至少3点接触这个平面。为了更可靠地定位这个零件,如零件不会在基准上因为接触面的不平整导致“晃动”,所以这个面(即3个支撑点围成的面)越大越可靠。更大的接触面保证了零件上的微观高点被量具上的基准模拟接触到,能更真实地代表这个零件特征,而且下次测量结果可重复。
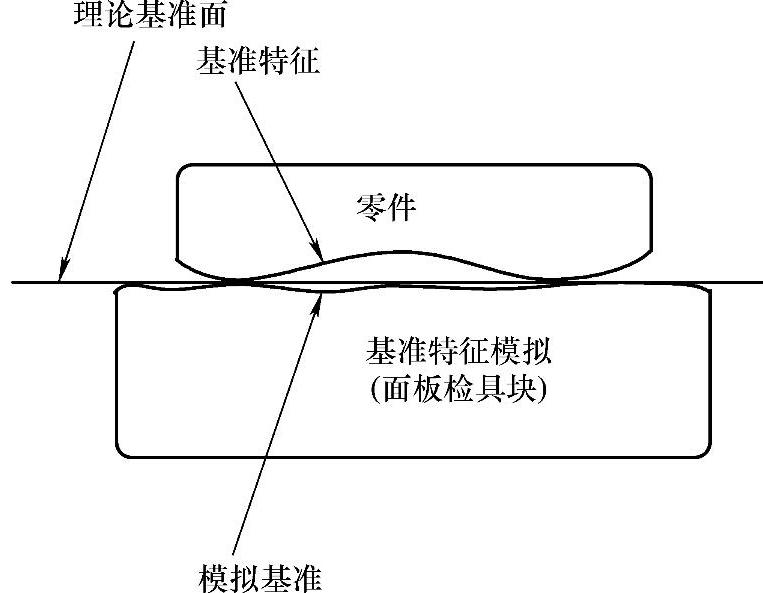
图3-5 基准要素
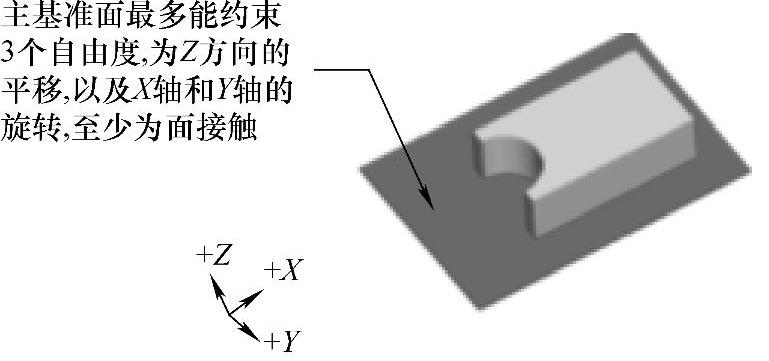
图3-6 主基准面约束3个自由度(https://www.xing528.com)
经过第一个基准面的定位,还剩下3个自由度没有约束。在图3-7中,第二基准面(又称为次基准面)最多可以约束2个自由度,分别为沿Y轴方向的平移和Z轴的旋转。实现这两个约束的最小条件是与第二基准面两点接触,即线接触。这个接触的线越长(两个点的跨度越大),这个零件的定位也越稳定,可重复性越高。
经过第一和第二两个基准面的约束,还剩下最后1个自由度没有被约束,就是X方向的平移,第三基准面只需要一点接触,就可约束这个最后的自由度,如图3-8所示。
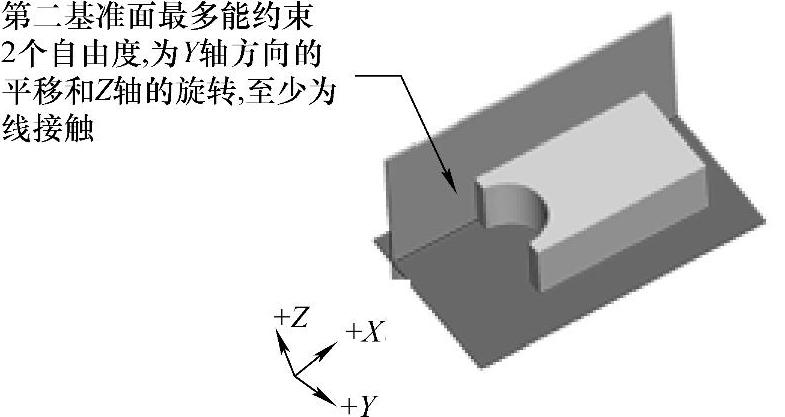
图3-7 第二基准面约束2个自由度
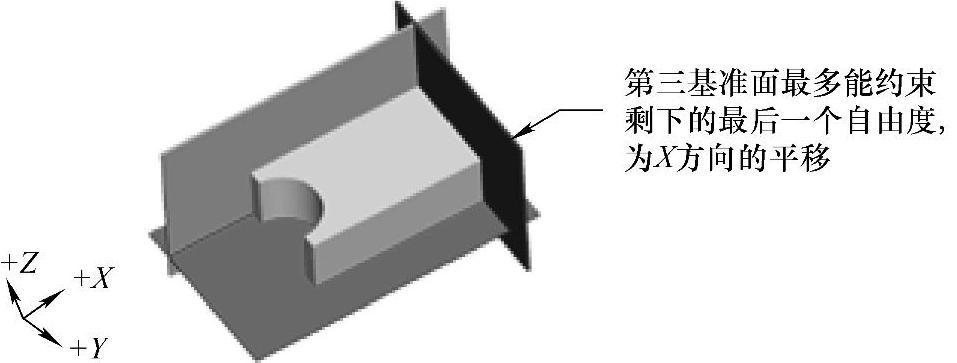
图3-8 第三基准面约束1个自由度
所以只要保证第一基准面3点接触,第二基准面2点接触,第三基准面1点接触,就能保证零件的6个自由度完全被约束,也就是完全定位一个零件在空间中的状态。这就是3-2-1原则的原理,如图3-9所示。零件上的每一个点都有一个唯一的坐标值。零件上的其他特征都可以基于这三个坐标平面来建立。这6个接触点就是零件上的基准特征,相对于检具上就是基准支撑点,处于三个相互垂直的平面上。
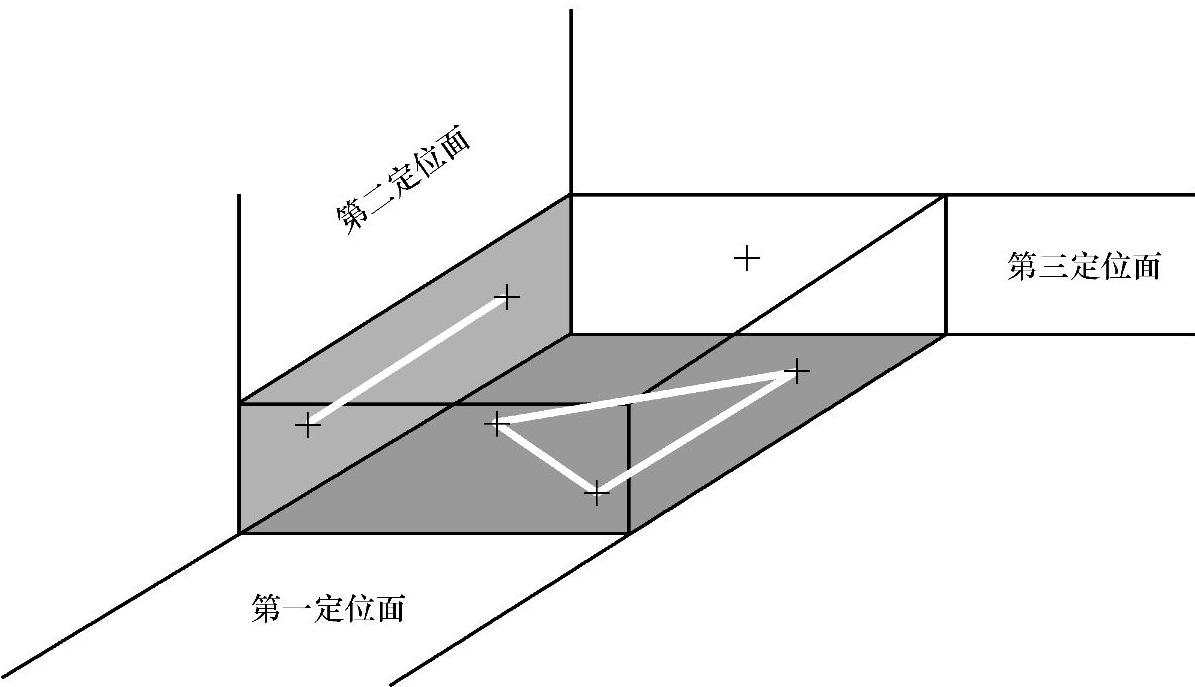
图3-9 3-2-1原则的原理
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。