



1.启动Workbench并建立分析项目
1)双击桌面上的【Workbench14.5】图标 ,启动ANSYS 14.5 Workbench,进入用户操作界面。
,启动ANSYS 14.5 Workbench,进入用户操作界面。
2)选择【Units】|【Metric(kg,mm.s,℃,mA,N,mV)】命令,设置分析单位,如图10-13所示。
3)双击【Toolbox(工具箱)】中【Component Systems】下的【Geometry】选项,即可在【Project Schematic(项目管理区)】创建分析项目A,如图10-14所示。
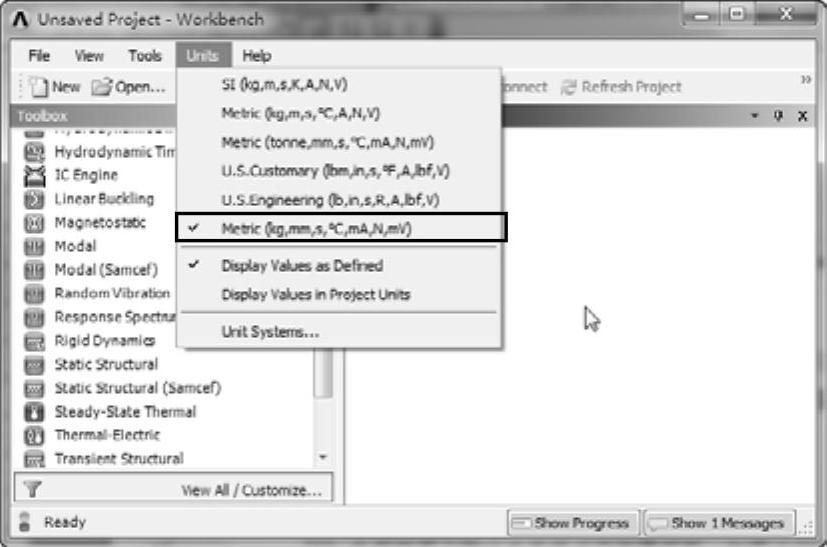
图10-13 设置分析单位
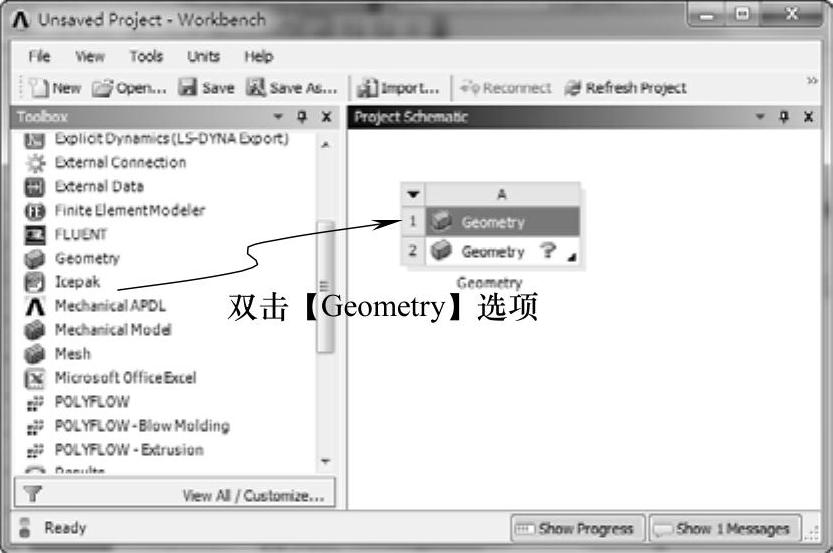
图10-14 创建分析项目A
4)在【Toolbox(工具箱)】中【Analysis Systems】下的【Rigid Dynamic】选项上按住鼠标左键,拖动到【Project Schematic(项目管理区)】分析项目A中的A2上,当A2呈红色高亮显示时,释放鼠标创建分析项目B,如图10-15所示。
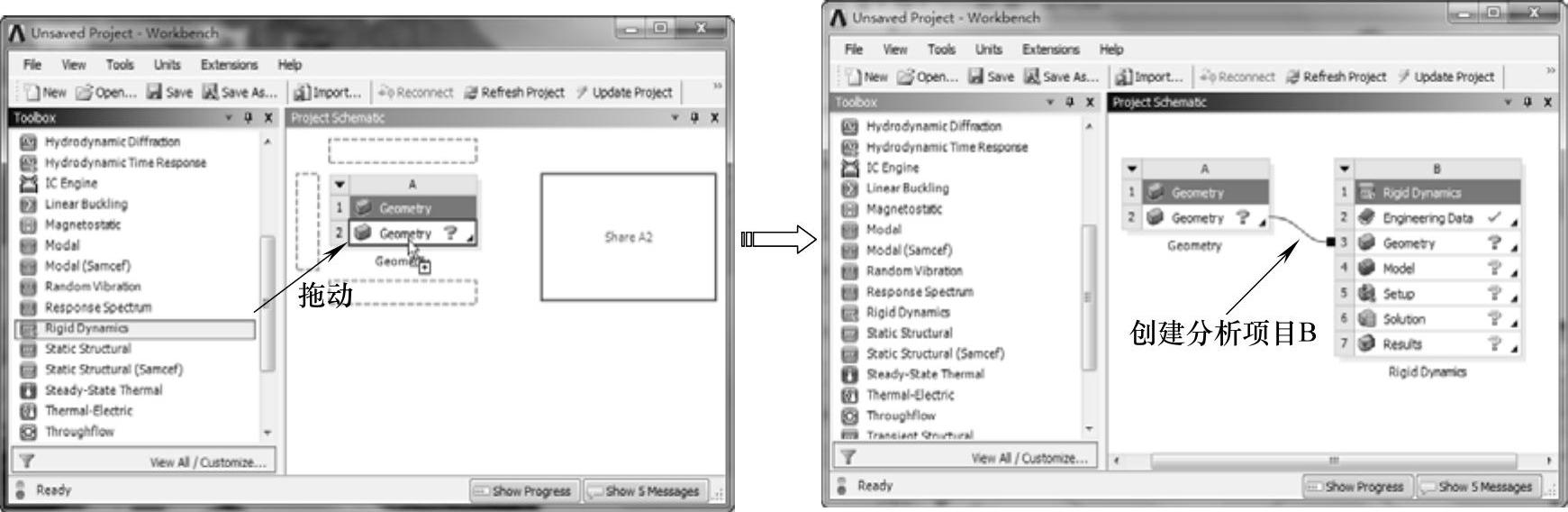
图10-15 创建分析项目B
2.导入几何体模型
1)在A2栏的【Geometry】项上单击鼠标右键,在弹出的快捷菜单中选择【Import Geometry】|【Browse】命令,如图10-16所示,弹出【打开】对话框。
2)在弹出的【打开】对话框中选择文件路径,导入随书光盘中的“\Chapter10\10.2\uncompleted\3D fourbar linkage.sldasm”几何体文件。此时,A2栏的【Geometry】项后面的 变为
变为 ,表明实体模型已经添加。
,表明实体模型已经添加。
3)双击项目A中的A2栏的【Geometry】项,此时会进入到DesignModeler界面,并弹出【ANSYS Workbench】对话框,选择【Millimeter】单选按钮设置mm单位,如图10-17所示。
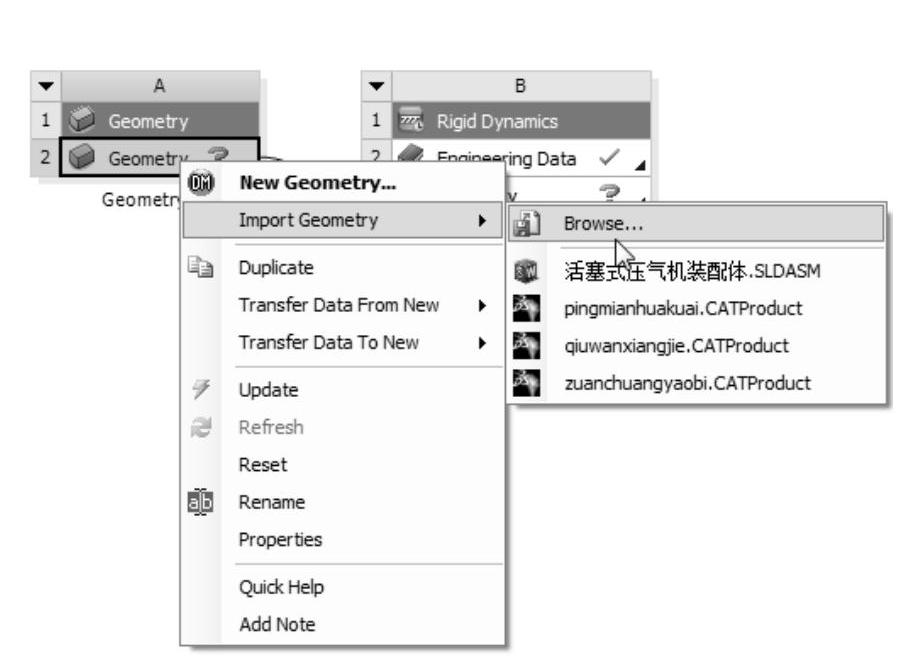
图10-16 选择【Import Geometry】|【Browse】命令
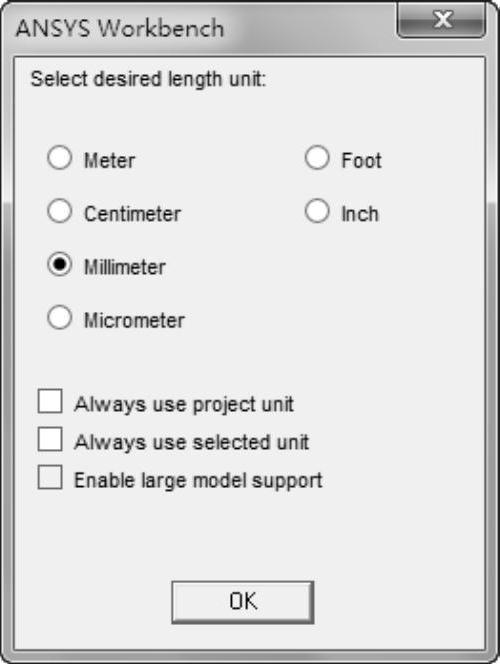
图10-17 【ANSYS Workbench】对话框
4)进入DM后,设计树中【Import1】节点前面显示 ,表示需要生成,图形窗口没有图形显示,单击
,表示需要生成,图形窗口没有图形显示,单击 按钮,生成几何体,即可在窗口右侧显示出几何图形,如图10-18所示。
按钮,生成几何体,即可在窗口右侧显示出几何图形,如图10-18所示。
5)单击 按钮,弹出【另存为】对话框,选择合适的文件路径和名称后(yaqiji.wbpj),单击【保存】按钮保存项目。
按钮,弹出【另存为】对话框,选择合适的文件路径和名称后(yaqiji.wbpj),单击【保存】按钮保存项目。
6)回到DesignModeler界面,单击右上角的 按钮,退出DesignModeler界面,返回到ANSYS Workbench主界面。
按钮,退出DesignModeler界面,返回到ANSYS Workbench主界面。
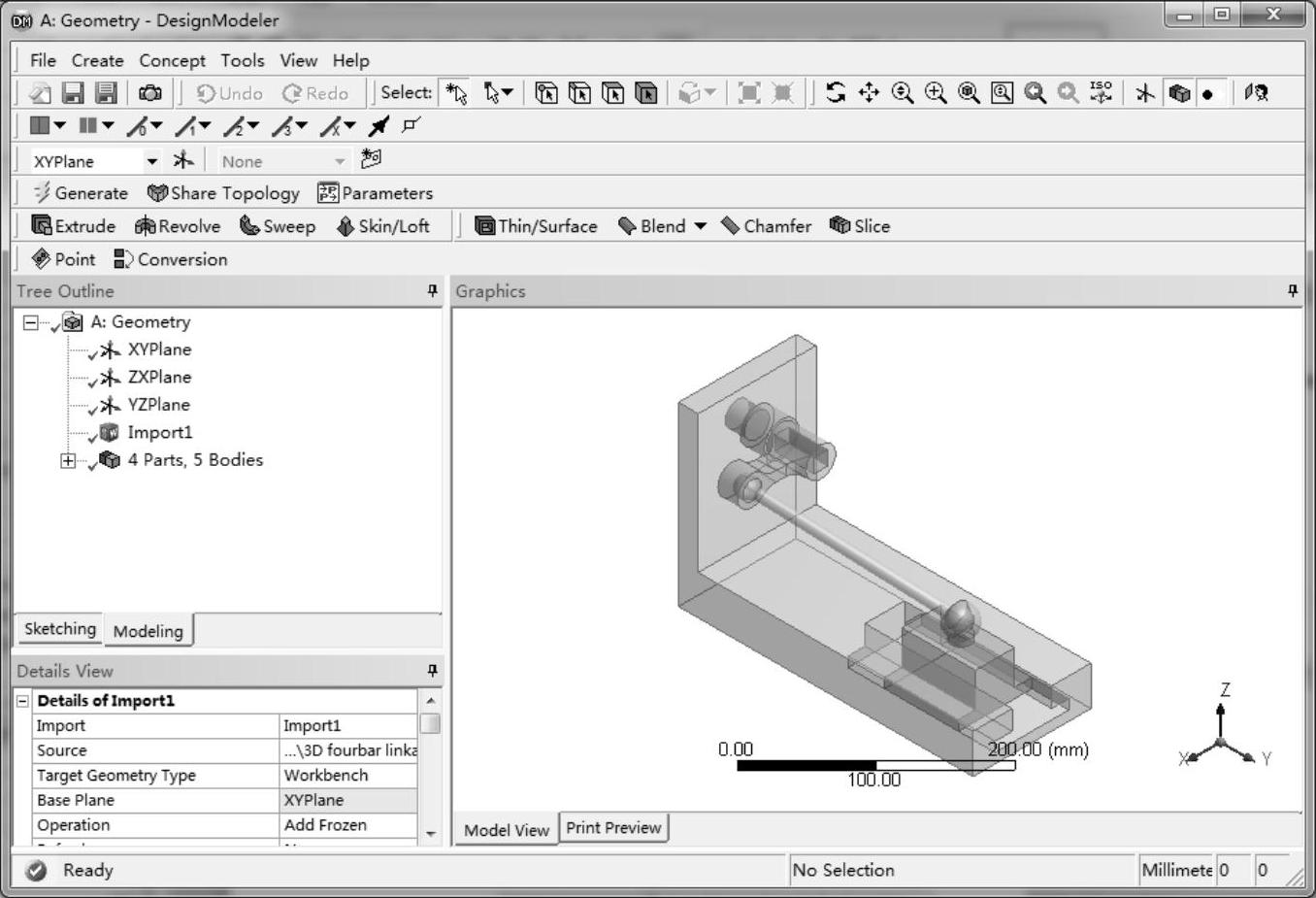
图10-18 生成几何图形后的DesignModeler界面
3.定义连接
1)双击【Project Schematic(项目管理区)】中项目B的B4栏的【Model】项,进入Mechanical界面。在该界面下可进行网格划分、分析设置、结果观察等。
2)展开窗口左侧【Outline(分析树)】中的【Connections】|【Contacts】节点,单击鼠标右键,在弹出的快捷菜单中选择【Delete】命令,删除默认的接触设置,如图10-19所示。
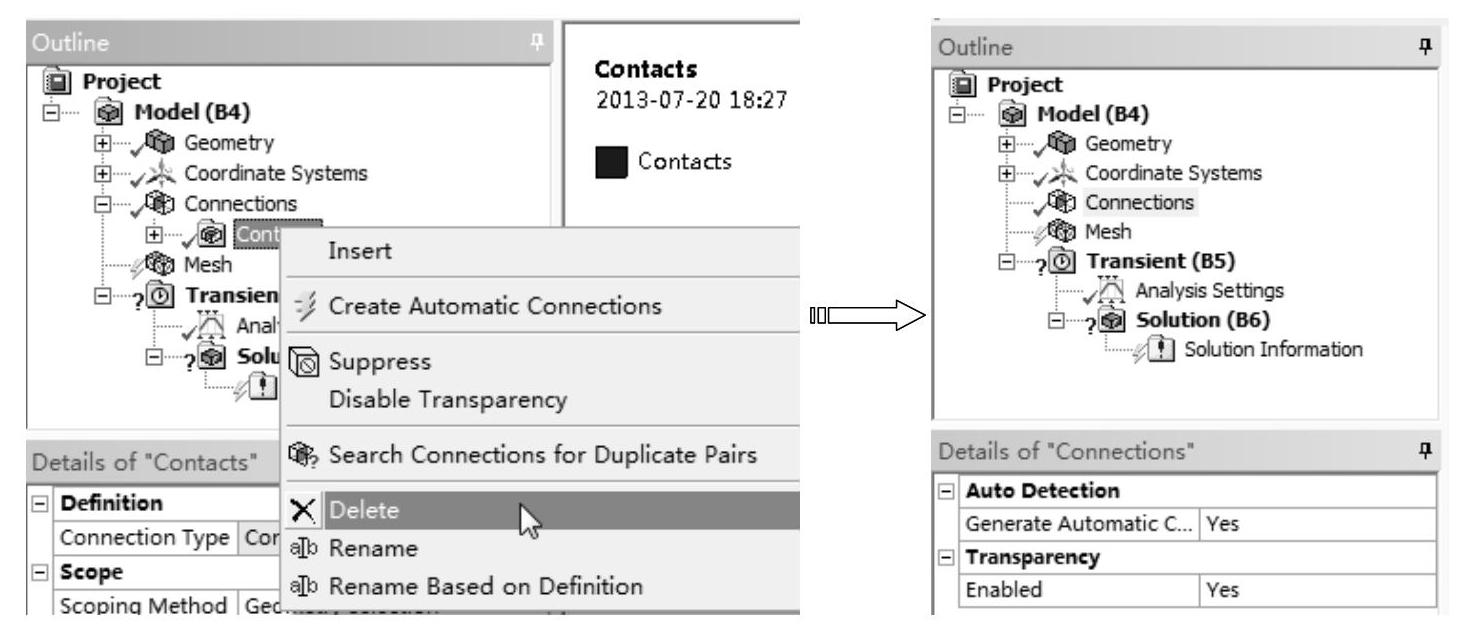
图10-19 删除默认的接触设置
3)在窗口左侧【Outline(分析树)】中选中【Connections】节点,单击【Connections】工具栏上的【Body Ground】|【Fixed】命令,分析树中增加【Fix-Ground To No Selection】节点。选择如图10-20所示的表面,单击详细设置窗口中的【Mobile】列表中【Body】下的【Apply】按钮完成,如图10-20所示。
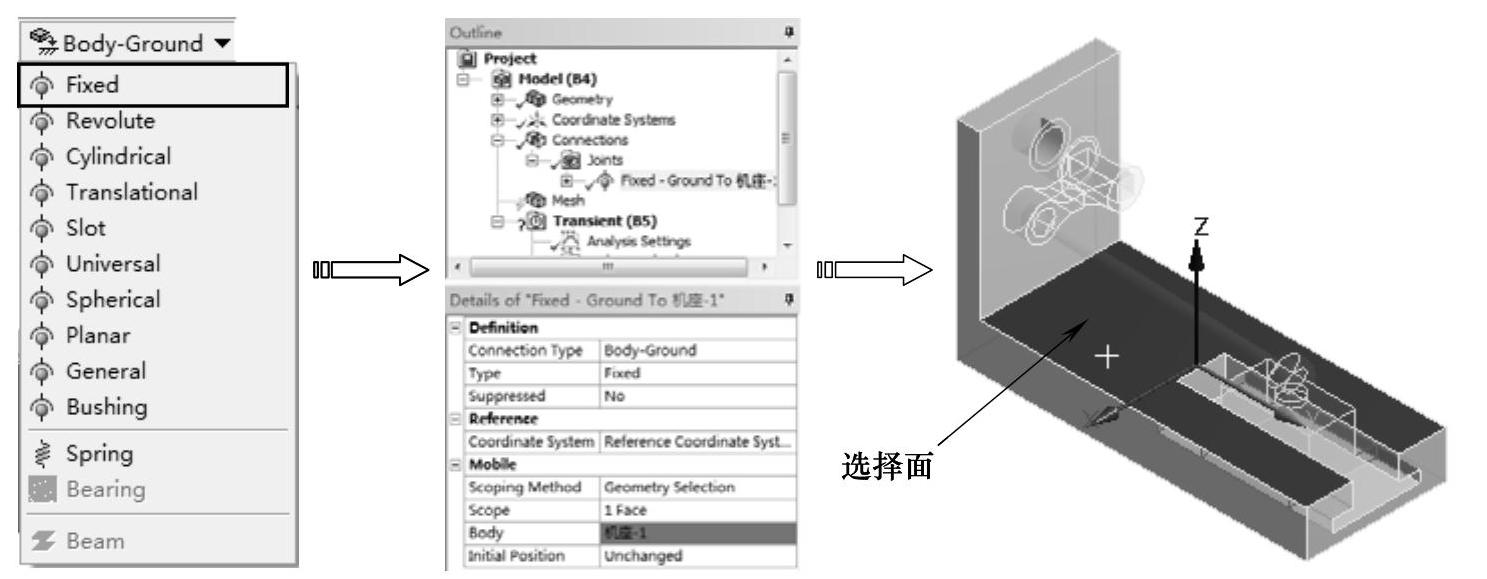
图10-20 固定
4)单击【Connections】工具栏上的【Body-Body】|【Revolute】命令,分析树中增加【Revolution-No Selection To No Selection】节点。分别选择如图10-21所示的表面,再分别单击详细设置窗口中的【Preference】和【Mobile】列表中【Body】下的【Apply】按钮完成,如图10-21所示。
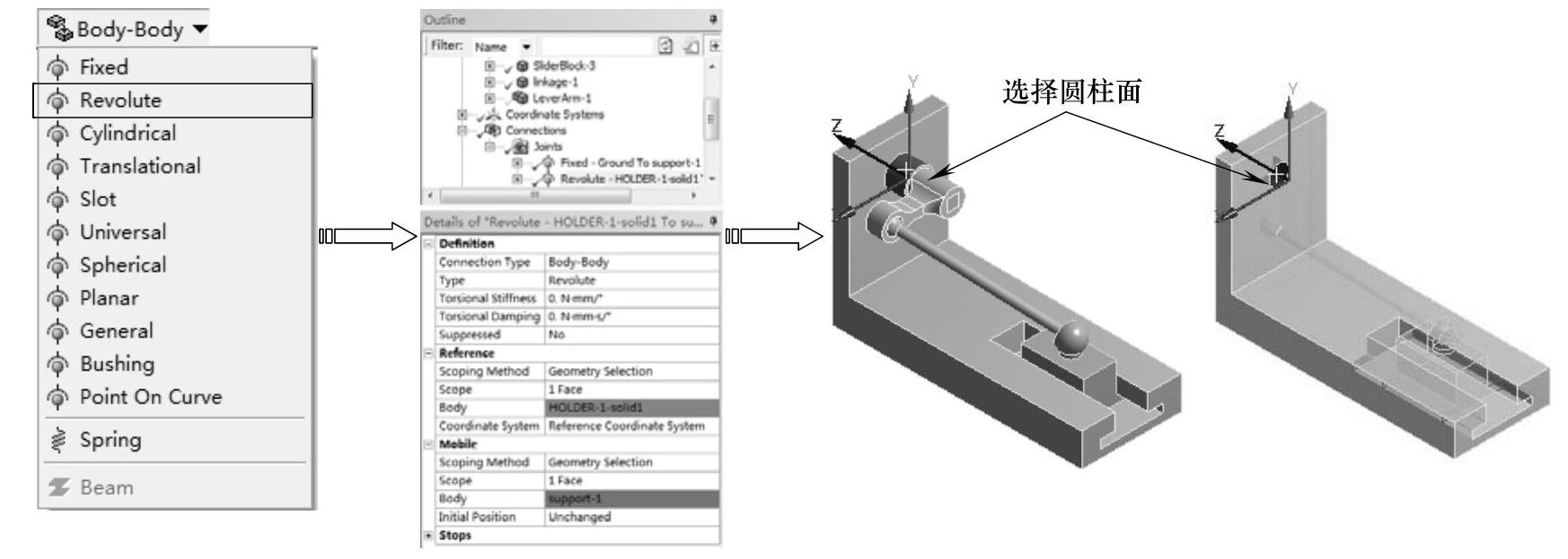
图10-21 创建旋转副
提示:选择时,可在分析树的【Geometry】节点下的各实体中单击右键,在弹出的快捷菜单中选择【Show Body】或【Hide Body】命令显示隐藏实体。
5)单击【Connections】工具栏上的【Body-Body】|【Spherical】命令,分析树中增加【Spherical-No Selection To No Selection】节点。分别选择如图10-22所示的表面,再分别单击详细设置窗口中的【Preference】和【Mobile】列表中【Body】下的【Apply】按钮完成,如图10-22所示。
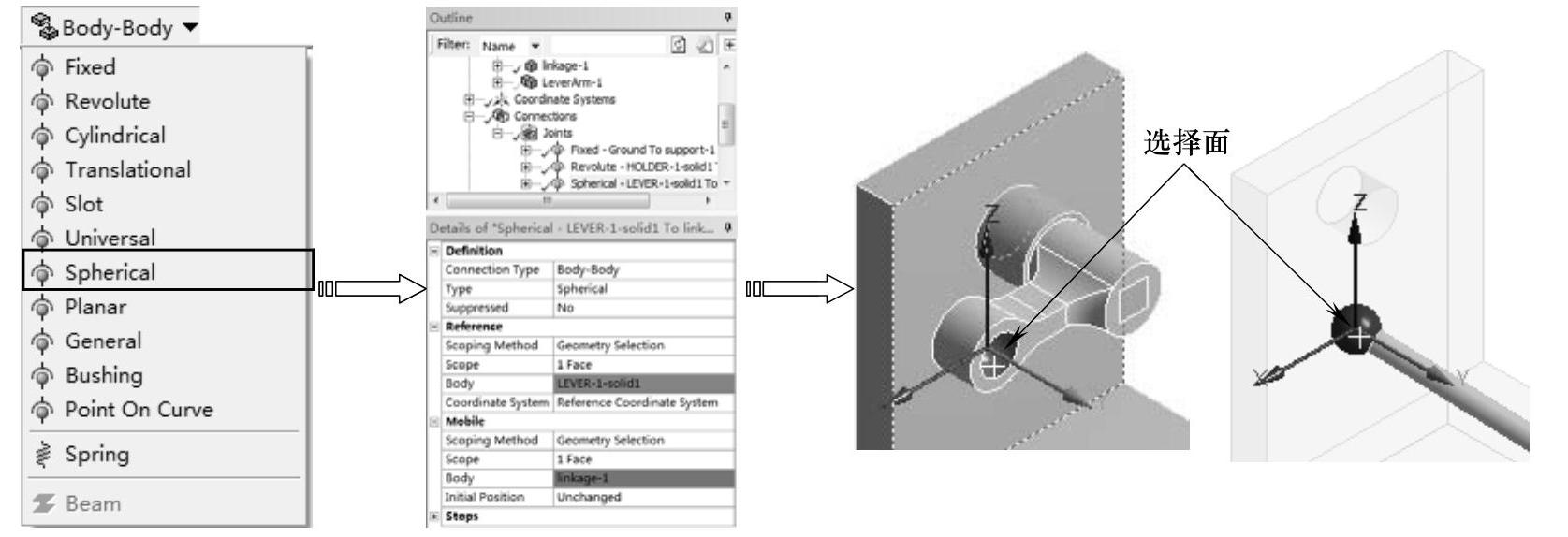
图10-22 创建球铰1
6)单击【Connections】工具栏上的【Body-Body】|【Spherical】命令,分析树中增加【Spherical-No Selection To No Selection】节点。分别选择如图10-23所示的表面,再分别单击详细设置窗口中的【Preference】和【Mobile】列表中【Body】下的【Apply】按钮完成,如图10-23所示。
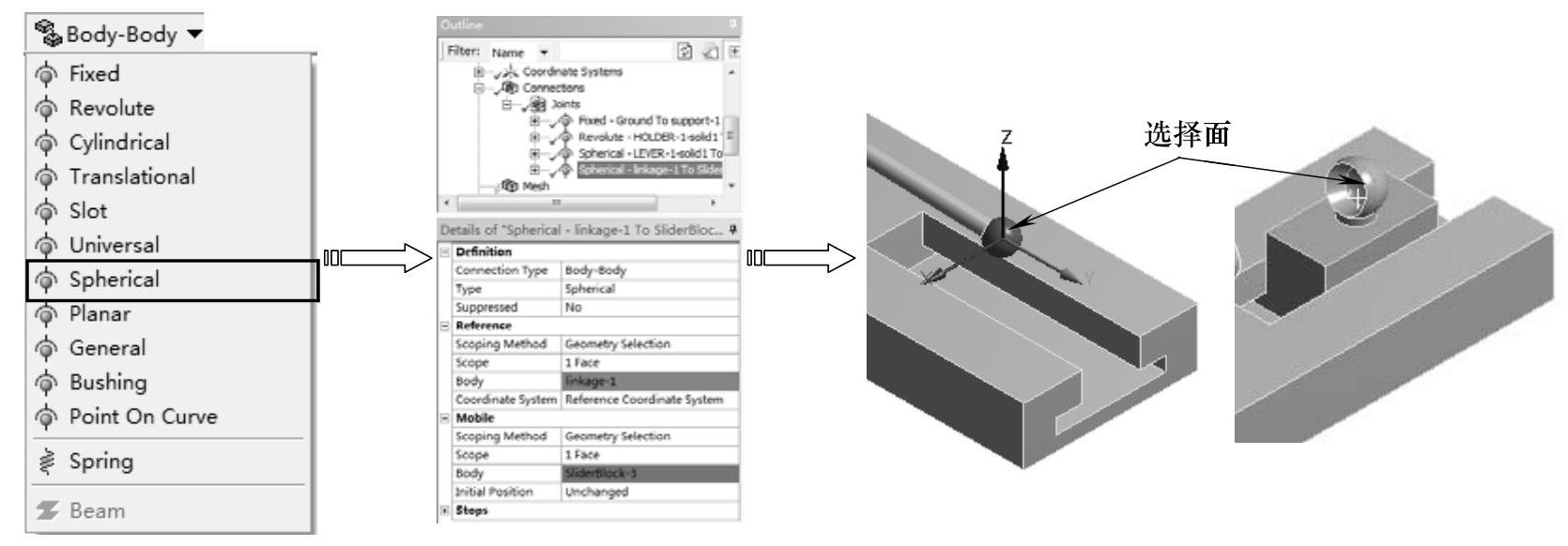
图10-23 创建球铰2
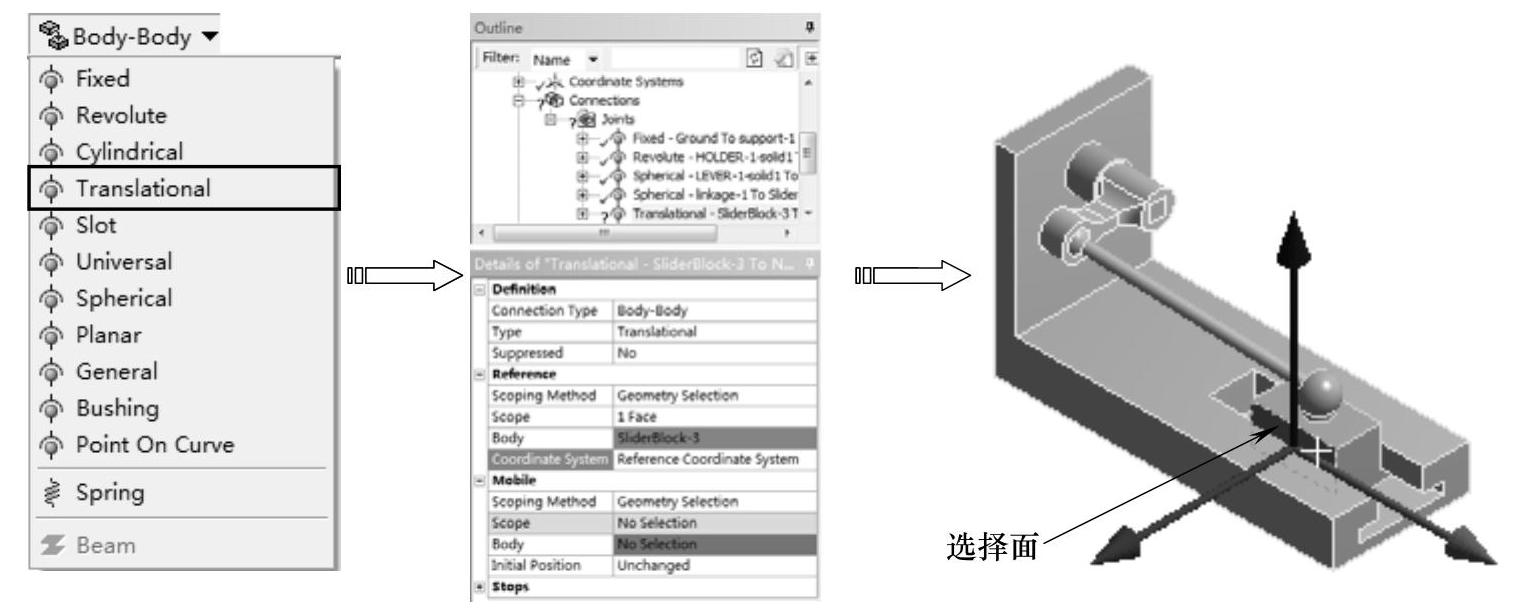
7)单击【Connections】工具栏上的【Body-Body】|【Translational】命令,分析树中增加【Translational-No Selection To No Selection】节点。选择如图10-24所示的表面,单击详细设置窗口中的【Preference】列表中【Body】下的【Apply】按钮完成,如图10-24所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图10-24 选择参考体
8)单击详细设置窗口中【Reference】下的【Coordinate System】项后的Reference Coordinate System,在图形区单击红色X轴,接着单击Y轴,然后单击详细设置窗口中的【Reference】列表中的【Coordinate System】下的【Apply】按钮完成,如图10-25所示。
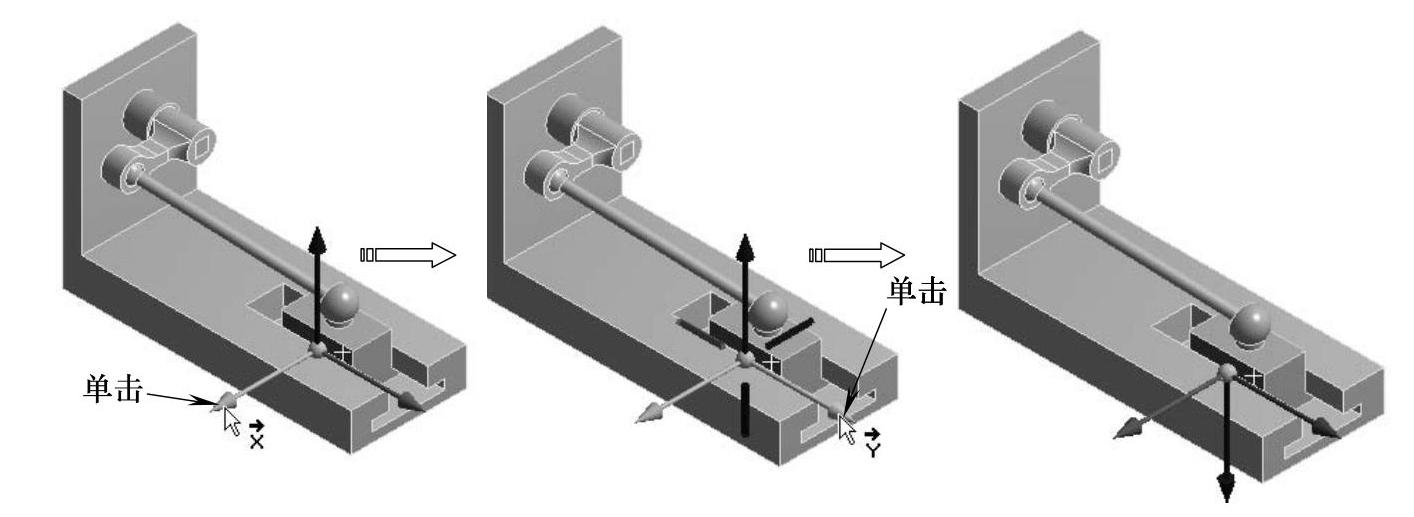
图10-25 设置参考坐标系
9)单击详细设置窗口中的【Mobile】列表中的【Body】项,选择如图10-26所示的表面,单击【Apply】按钮完成,如图10-26所示。
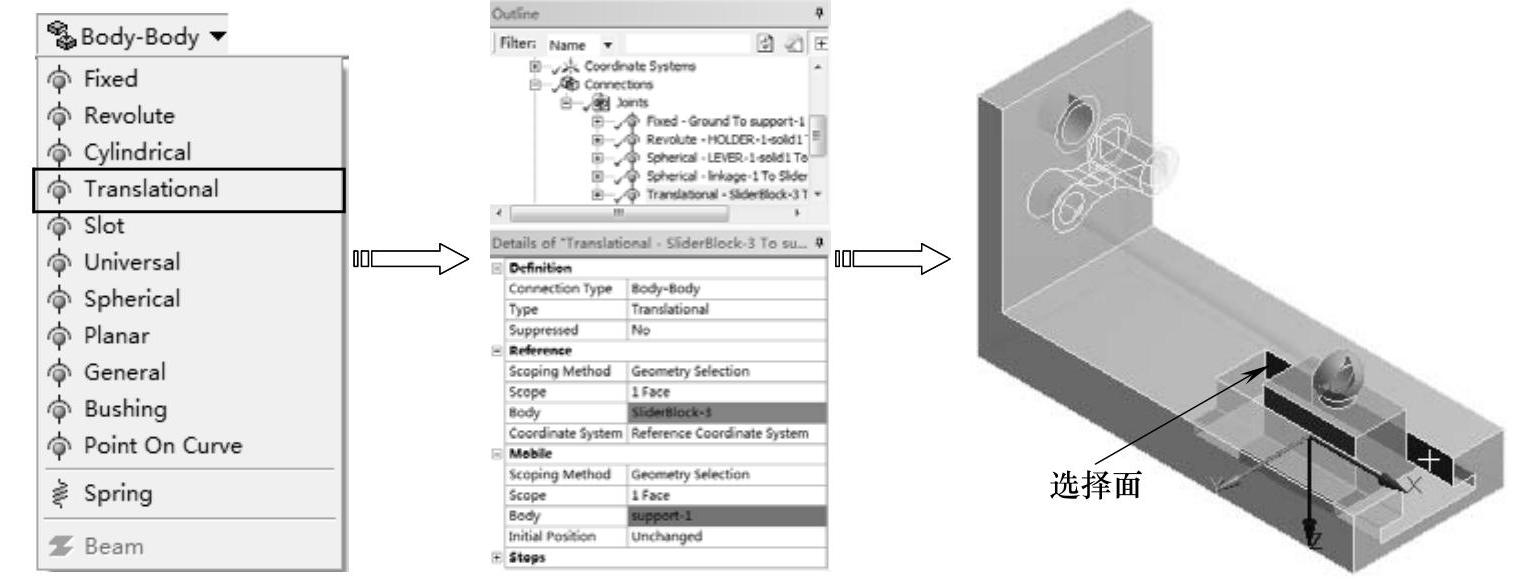
图10-26 选择活动体
4.施加载荷与边界条件
1)在【Outline(分析树)】中选择【Transient(B5)】节点下的【Analysis Settings】节点,在详细设置窗口中设置【Step End Time】为2s,如图10-27所示。
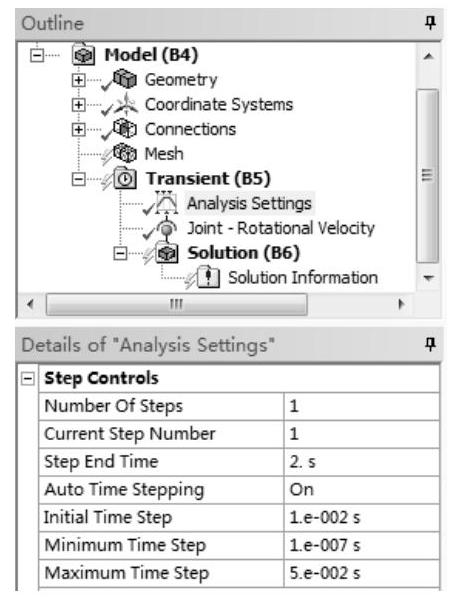
图10-27 Analysis Settings
2)在【Outline(分析树)】中选择【Transient(B5)】节点,单击【Environment】工具栏上的【Loads】|【Joint Load】命令,在详细设置窗口的【Joint】下拉列表中选择Revolute关节,在【Type】下拉列表中选择Rotational Velocity,设置【Magnitude】为60rpm,如图10-28所示。
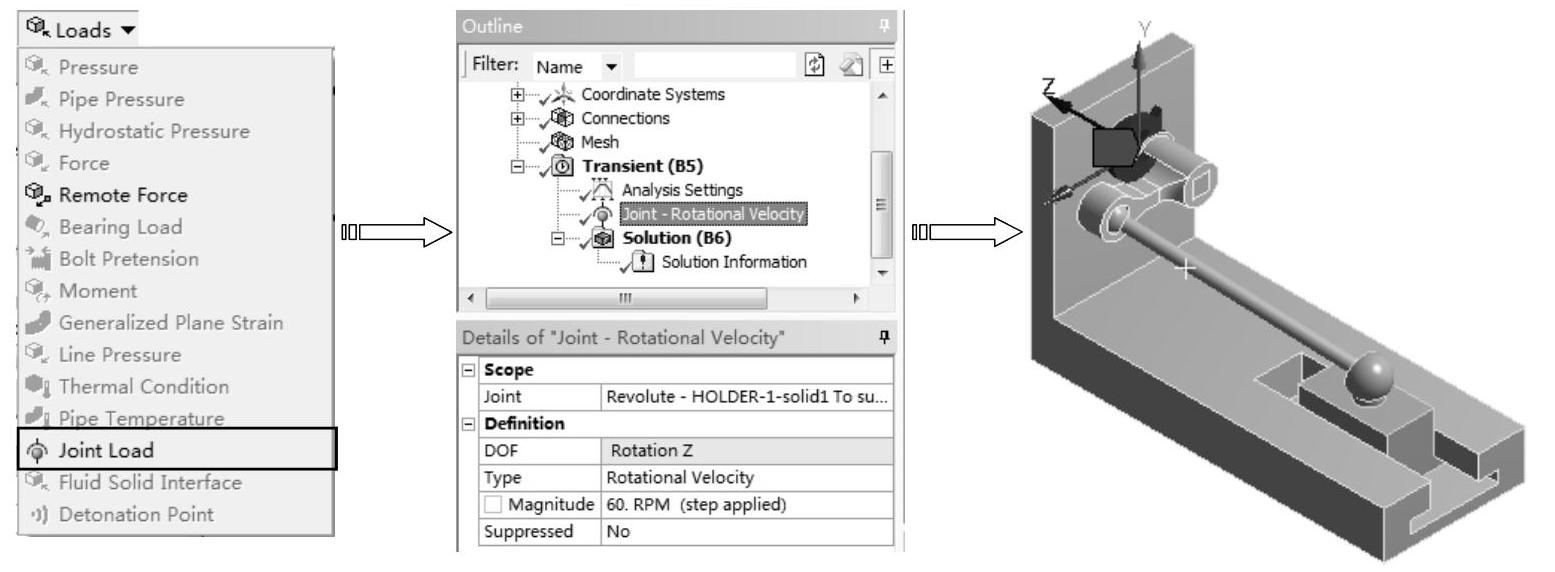
图10-28 施加旋转角速度
提示:施加旋转角速度时,系统默认的单位为rad/s,可选择【Units】|【RPM】命令,将单位设置为每分钟转数。
5.设置求解项
1)在【Outline(分析树)】中选择【Solution(B6)】节点,出现【Solution】工具栏。
2)求解位移。单击【Solution】工具栏上的【Deformation】|【Directional】命令,此时在分析树中插入【Directional Deformation】项,在图形区选择如图10-29所示的实体,然后在详细设置窗口中设置【Orientation】为Y Axis,如图10-29所示。
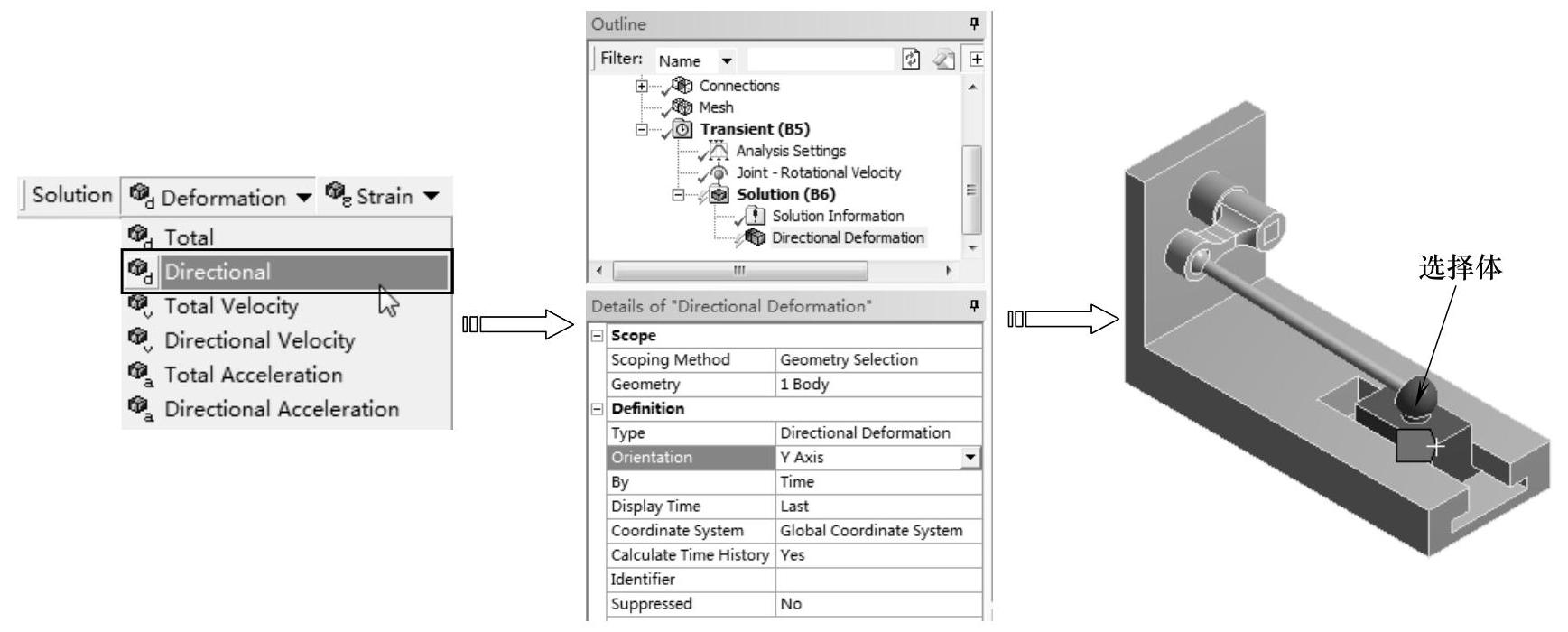
图10-29 添加位移求解项
3)求解速度。单击【Solution】工具栏上的【Deformation】|【Directional Velocity】命令,此时在分析树中插入【Directional Velocity】项,在图形区选择如图10-30所示的实体,在详细设置窗口中设置【Orientation】为Y Axis,如图10-30所示。
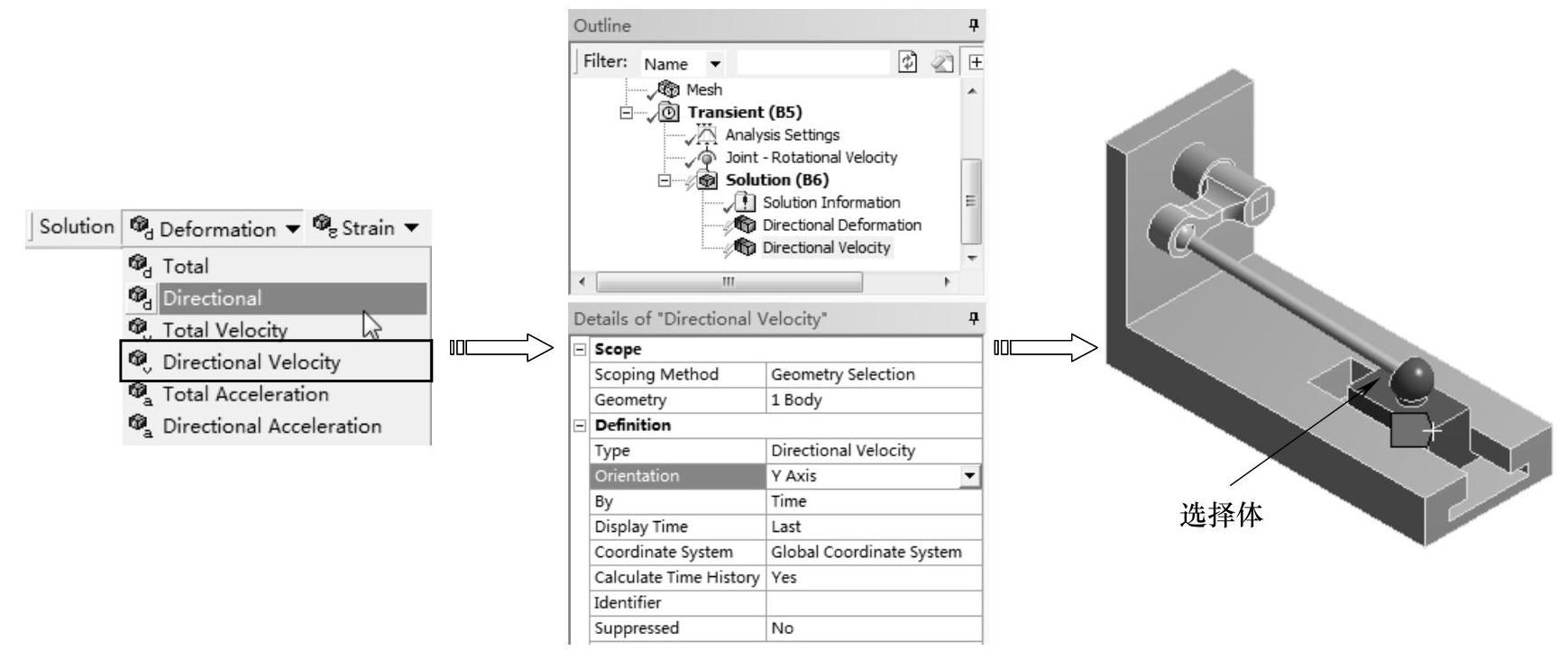
图10-30 添加速度求解项
4)求解加速度。单击【Solution】工具栏上的【Deformation】|【Directional Acceleration】命令,此时在分析树中插入【Directional Acceleration】项,在图形区选择如图10-31所示的实体,在详细设置窗口中设置【Orientation】为Y Axis,如图10-31所示。
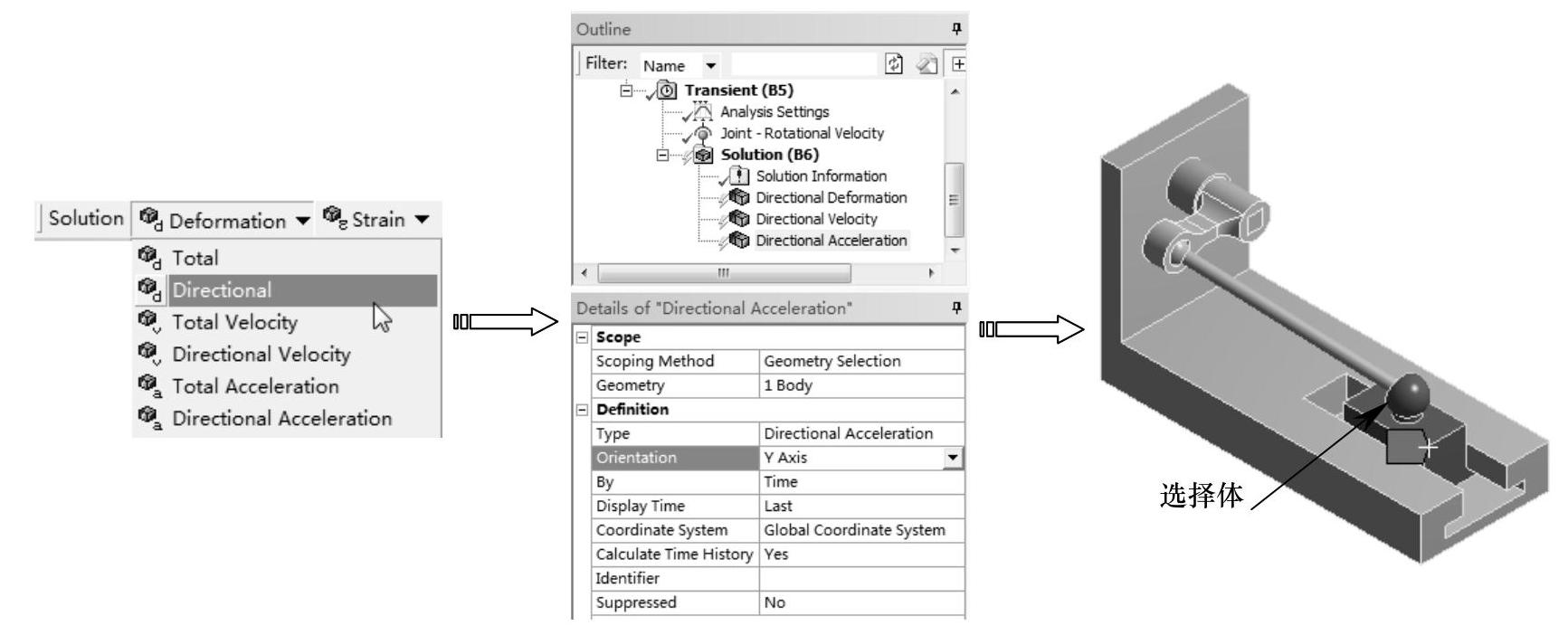
图10-31 添加加速度求解项
6.求解并显示分析结果
1)单击工具栏上的【Solve】按钮 ,启动求解,系统弹出进度条,表示正在求解。求解完成后进度条自动消失,如图10-32所示。
,启动求解,系统弹出进度条,表示正在求解。求解完成后进度条自动消失,如图10-32所示。
图10-32 求解进度条
2)位移结果。在【Outline(分析树)】中选择【Solution(B6)】节点,单击其下的【Directional Deformation】项 ,在图形窗口显示位移结果,如图10-33所示。
,在图形窗口显示位移结果,如图10-33所示。
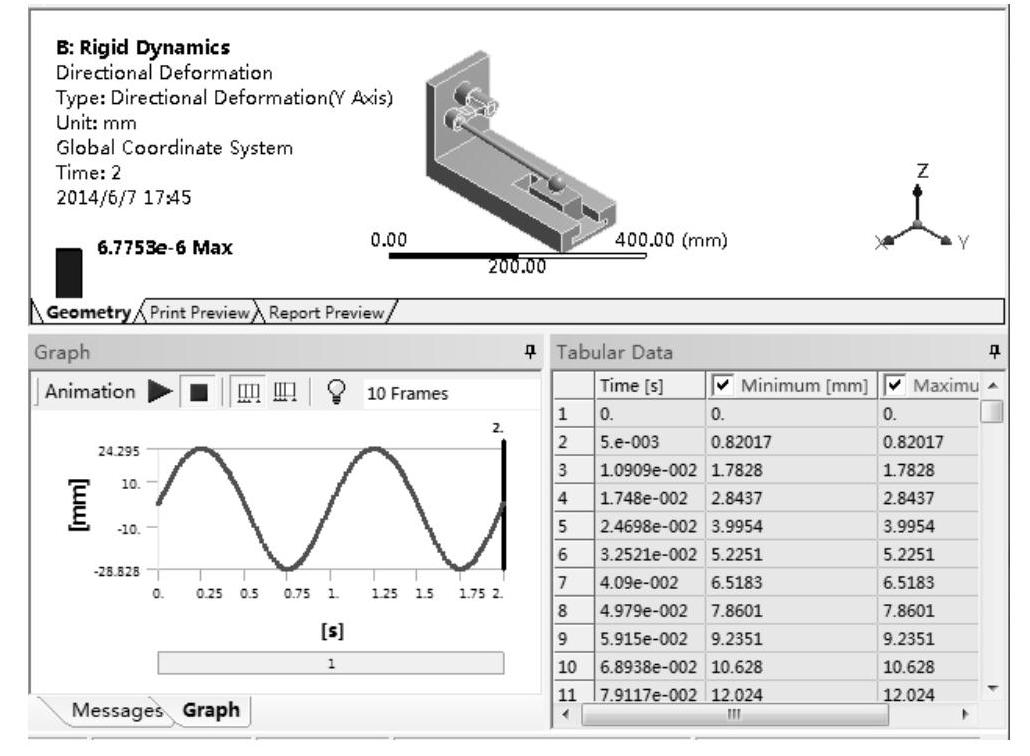
图10-33 位移结果图和数据表
3)速度结果。在【Outline(分析树)】中选择【Solution(B6)】节点,单击其下的【Directional Velocity】项 ,在图形窗口显示速度结果,如图10-34所示。
,在图形窗口显示速度结果,如图10-34所示。
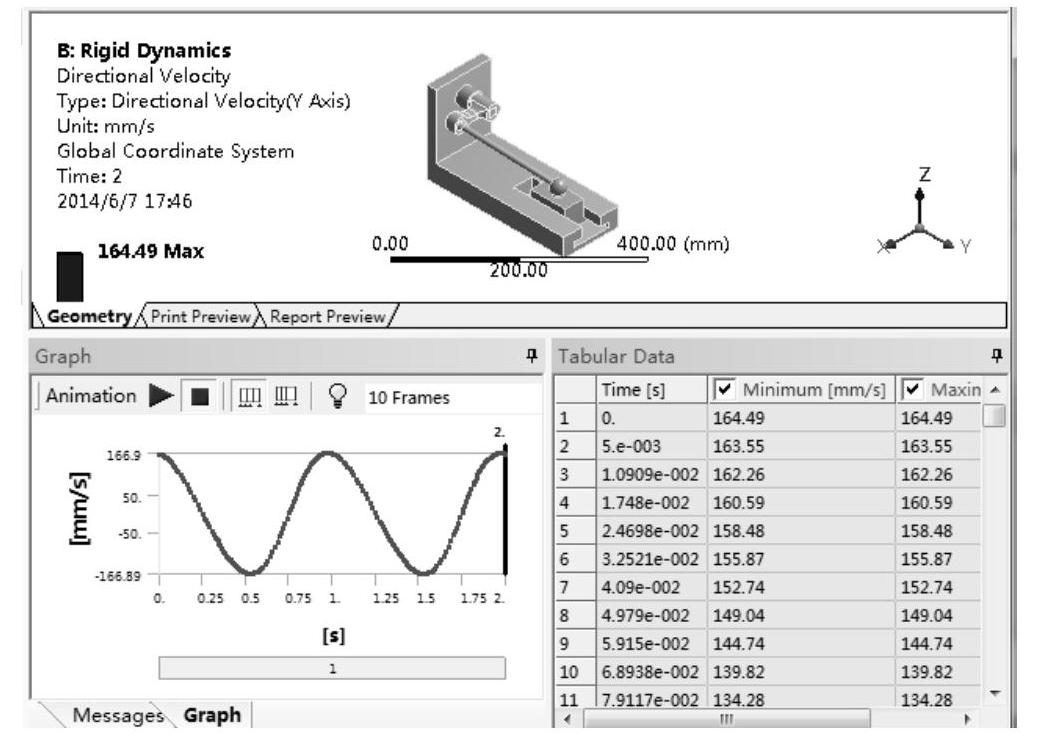
图10-34 速度结果图和数据表
4)加速度结果。在【Outline(分析树)】中选择【Solution(B6)】节点,单击其下的【Directional Acceleration】项 ,在图形窗口显示加速度结果,如图10-35所示。
,在图形窗口显示加速度结果,如图10-35所示。
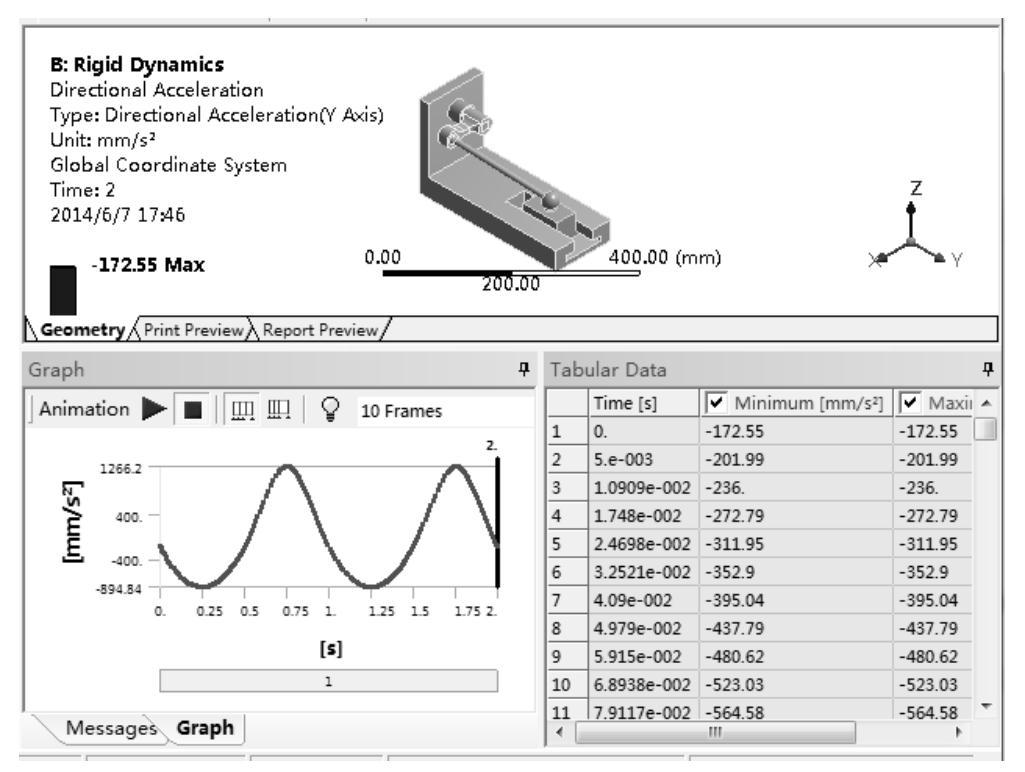
图10-35 加速度结果图和数据表
7.保存和退出
1)单击Mechanical界面右上角的【关闭】按钮 ,退出Mechanical界面,返回ANSYS Workbench主界面。
,退出Mechanical界面,返回ANSYS Workbench主界面。
2)单击工具栏上的【Save Project】按钮 ,保存项目,然后单击右上角的【关闭】按钮
,保存项目,然后单击右上角的【关闭】按钮 退出。
退出。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。