



Rigid Dynamic中利用运动副(Joints)、弹簧(Spring)、摩擦接触(Frictionless Contact)等方式来建立零件与零件之间(Body-Body)、零件与机架之间(Body-Ground)的连接,以保证零件间的精确定位。
关节连接(Joint)用来模拟几何体中两点之间的连接关系,每一个点有6个自由度,两点间的相对运动由6个相对自由度描述,每个运动副的运动方向由关节参考坐标系的方向确定。
1.Fixed(固定)
固定施加到点、线、面上,用于设置体与地面固定(Body-Ground)或者两实体之间刚性连接(Body-Body),约束体所有自由度,如图10-2所示。

图10-2 固定
2.Revolute(旋转副)
旋转是指两个构件(Body-Body)或构件和地面(Body-Ground)之间的相对运动为转动的运动副,也称为铰链。旋转副实现绕Z轴转动,限制掉的自由度为UX、UY、UZ、ROTX、ROTY等,如图10-3所示。
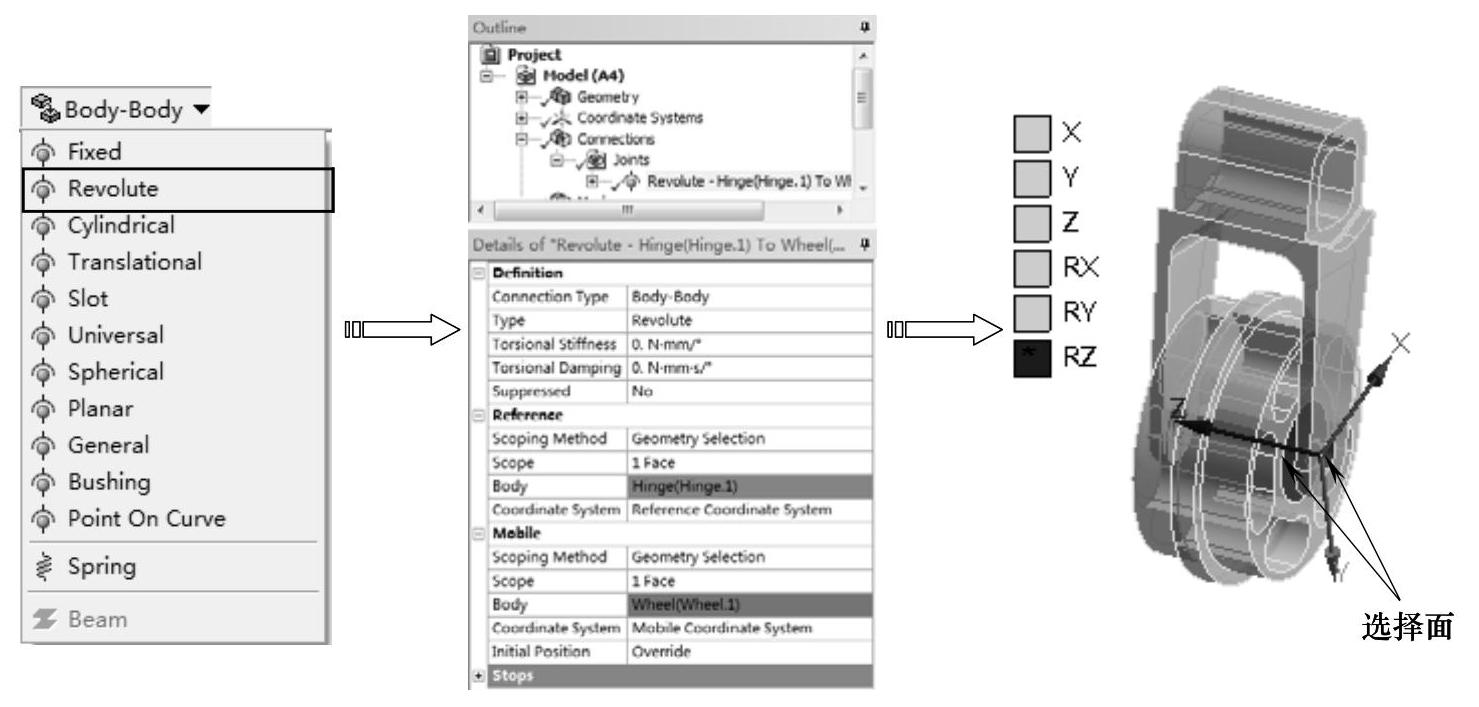
图10-3 旋转副
✧ Torsional Stiffness(抗扭刚度):测量轴对扭力的阻力,只能对柱关节和转动关节添加扭转刚度。
✧ Torsional Damping(抗扭阻尼):测量对轴或沿转轴体产生角振动的抗力,只能对柱关节和转动关节添加抗扭阻尼。
3.Cylindrical(圆柱面滑动副)
圆柱面滑动副是指两个构件之间的沿公共轴线转动又能像移动副一样沿着该轴线滑动的运动副,如钻床摇臂运动。圆柱面滑动副实现绕Z轴转动,同时沿Z轴方向移动,限制掉的自由度为UX、UY、ROTX、ROTY等,如图10-4所示。
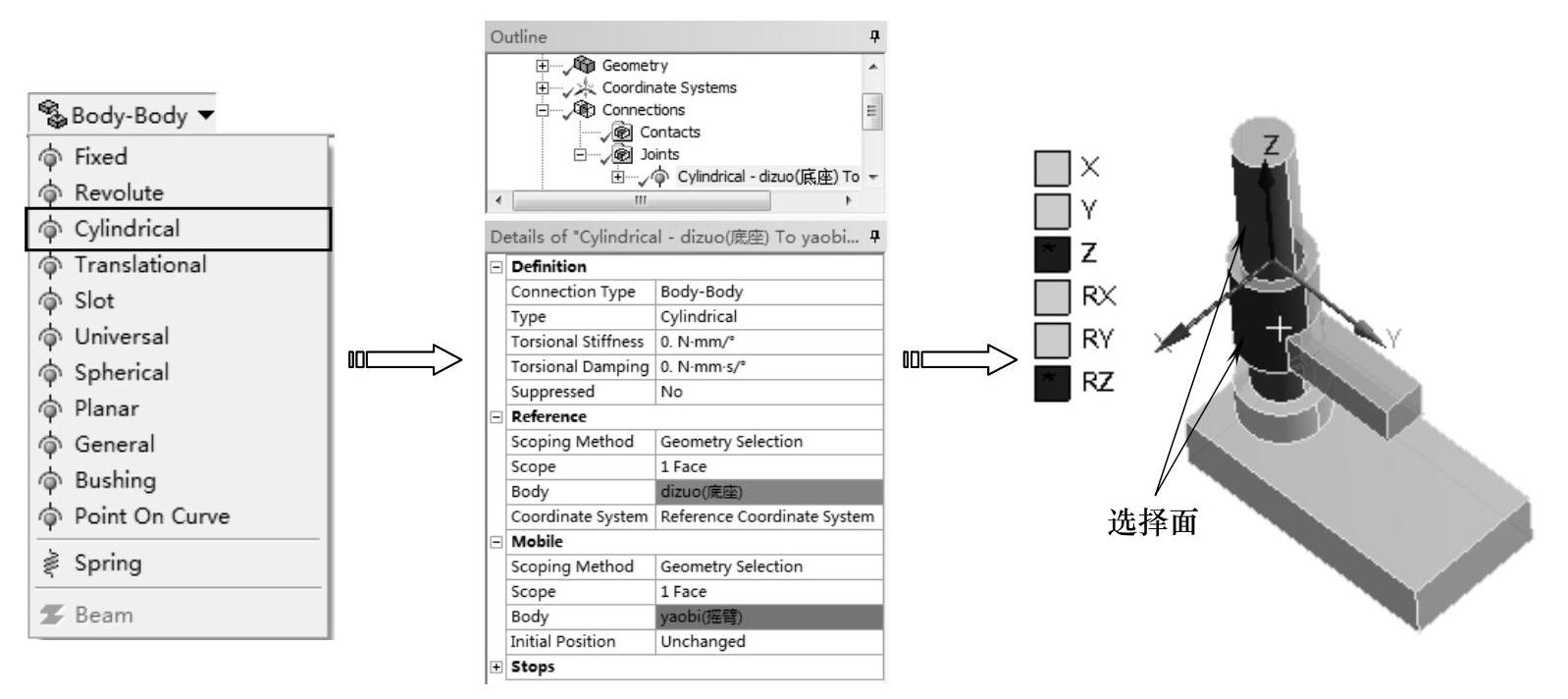
图10-4 圆柱面滑动副
4.Translational(移动副)
移动副是指两个构件之间的相对运动为沿某一条公共直线滑动运动副,如图10-5所示。移动副实现沿X轴方向移动,限制掉的自由度为UY、UZ、ROTX、ROTY、ROTZ等。
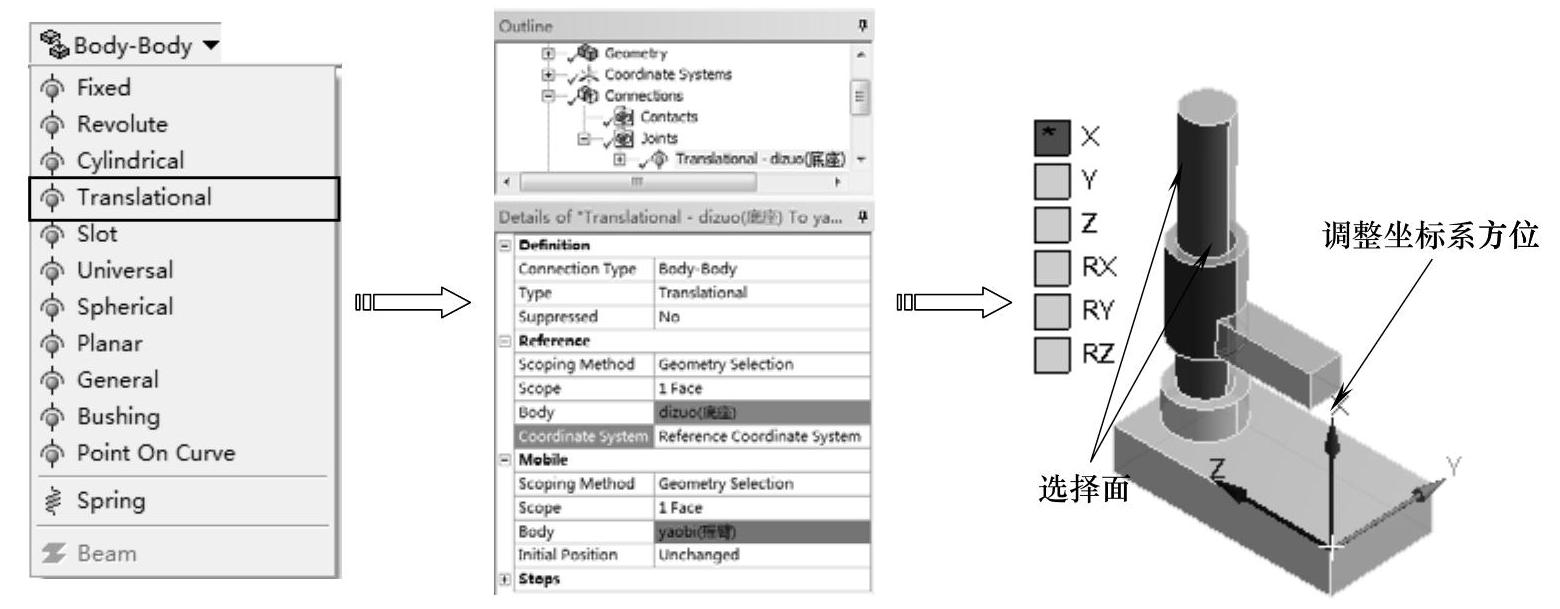
图10-5 移动副
5.Slot(滑槽)(https://www.xing528.com)
滑槽是指两个构件之间的相对运动为沿某一条公共直线滑动运动副,如图10-6所示。滑槽实现沿X轴方向移动,绕3个坐标轴转动,限制掉的自由度为UY、UZ等。
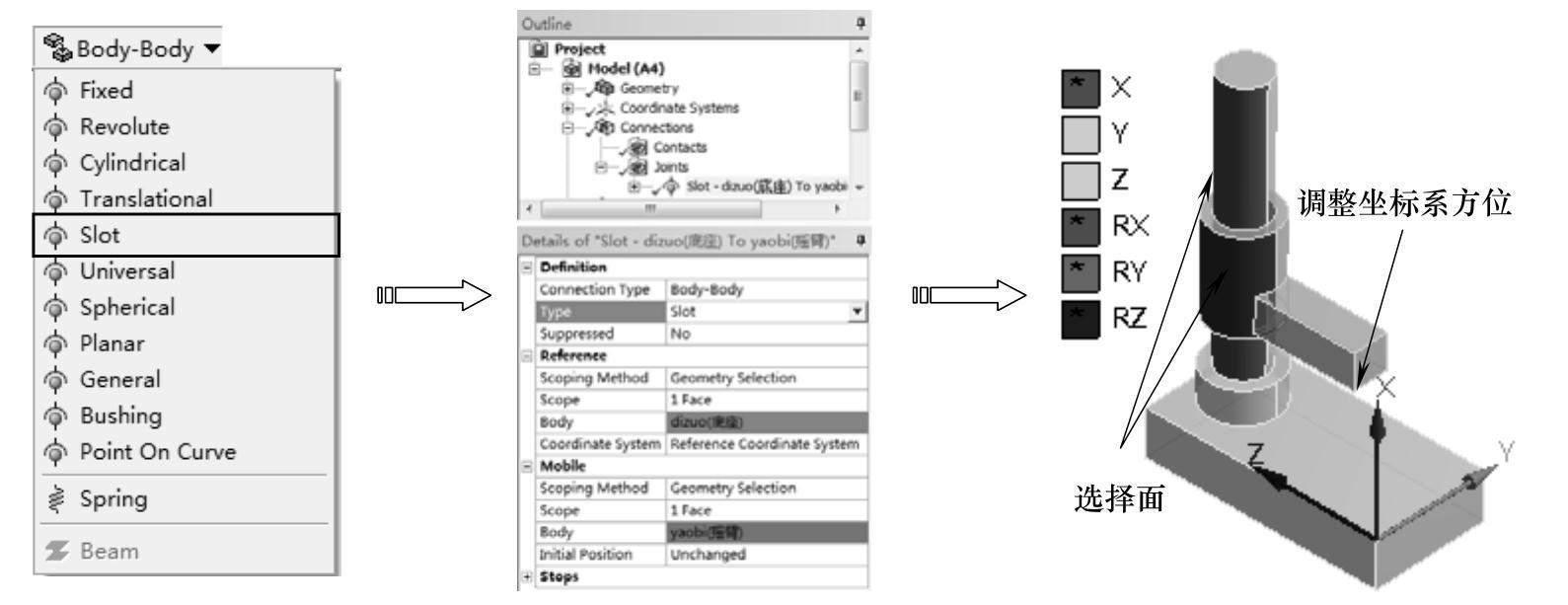
图10-6 滑槽
6.Spherical(球铰)
球铰是指两个构件之间仅被一个公共点或一个公共球面约束的多自由度运动副,可实现多方向的摆动与转动,如球形万向节。球铰实现沿X、Y、Z轴方向转动,限制掉的自由度为UX、UY、UZ等,如图10-7所示。
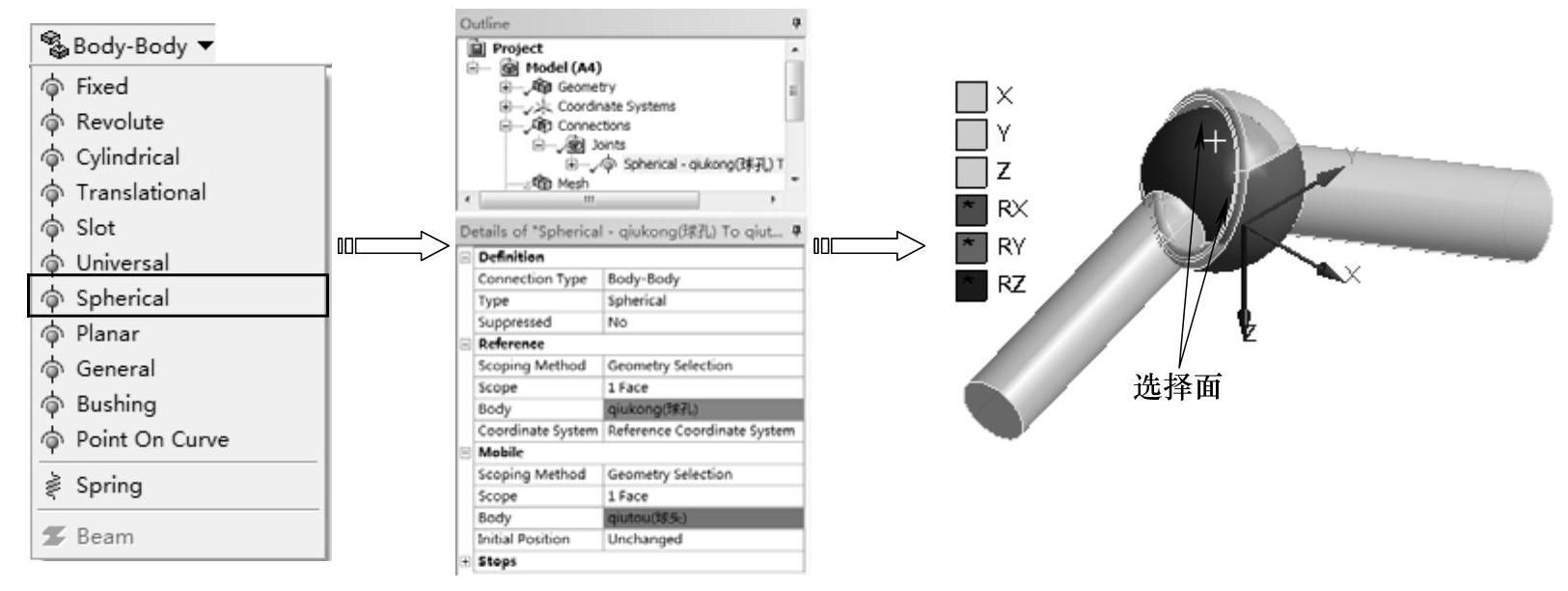
图10-7 球铰
7.Planar(平面)
平面副是指两个构件之间以公共的平面为约束,具有除沿平面法向移动及绕平面坐标轴转动之外的3个自由度,如图10-8所示。
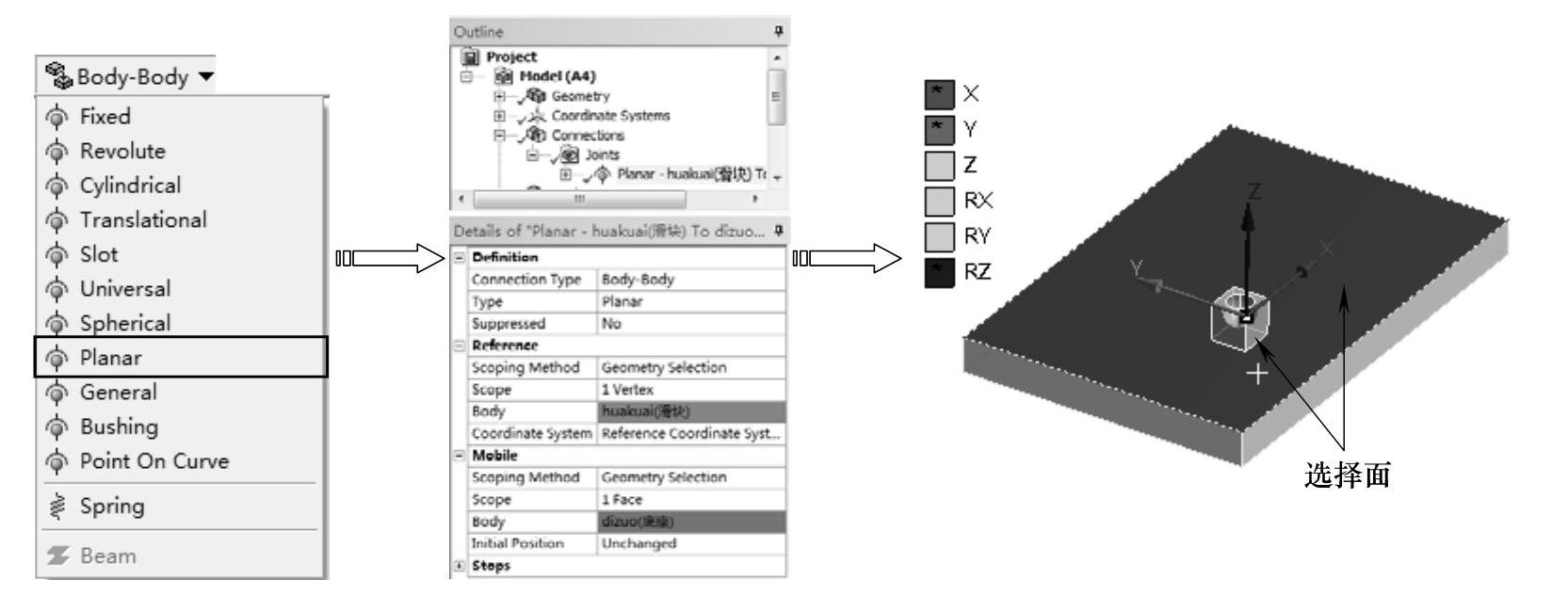
图10-8 平面副
8.Spring(弹簧)
弹簧作为弹性单元用于储存机械能,当载荷去除后恢复原状,弹簧可为纵簧或扭簧,可具有弹簧刚度和阻尼,允许度弹簧施加力载荷,如图10-9所示。
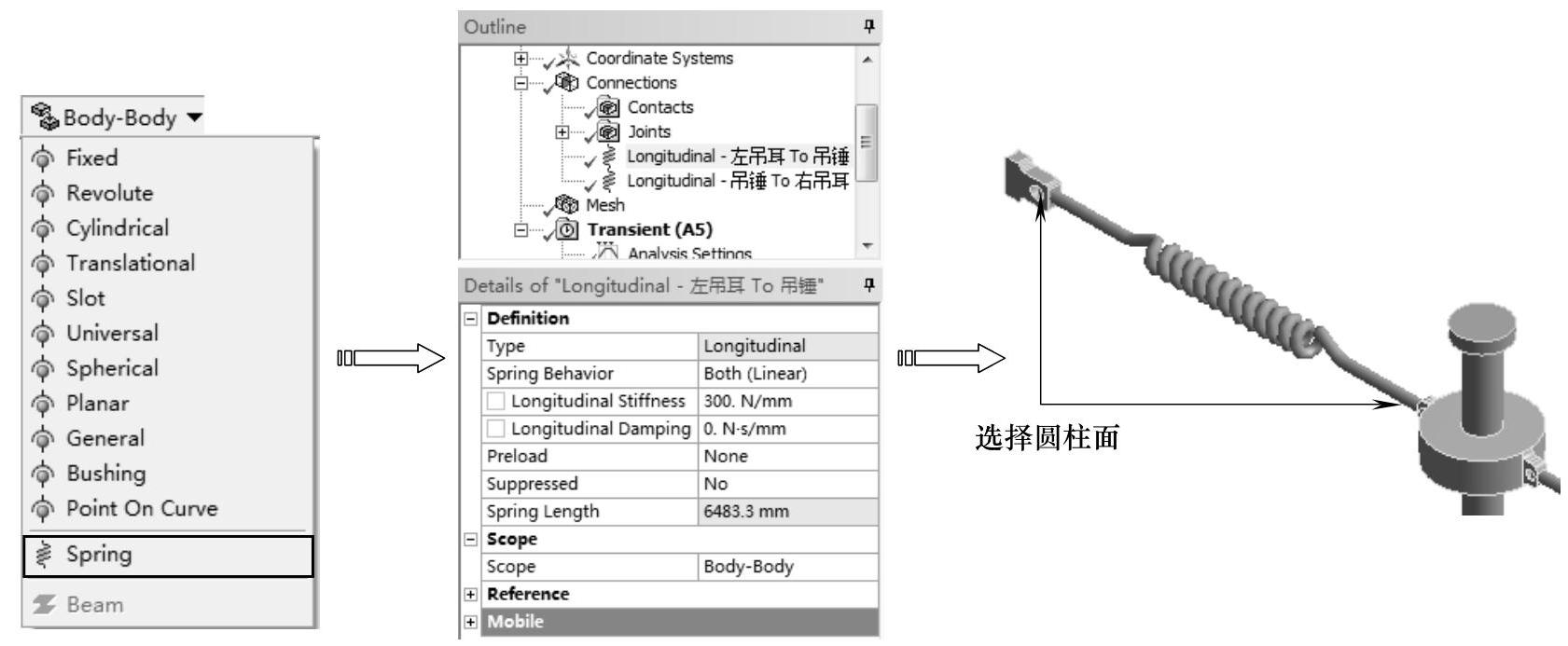
图10-9 弹簧
✧ Spring Behavior:包括“Both(Linear)”“Compression Only(压缩)”和“Tension Only(拉伸)”。
✧ Longitudinal Stiffness:弹簧刚度。
✧ Longitudinal Damping:弹簧阻尼。
✧ Preload:弹簧预载荷。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。