



锤头的动作是靠操纵配气操纵机构来实现的。下面介绍一种目前生产中常用的不作自动连续打击的配气操纵机构。
1.配气机构
配气机构的结构参照图3-3-5,主要由节气阀和滑阀及其阀套组成。
节气阀体为开有窗口的空心圆柱体(见图3-3-5)或开有矩形开口的圆柱体(见图3-3-7),通过操作手柄G使节气阀体在节气阀套中转动(见图3-3-7)。控制阀口的启闭,节气阀起到进气管路的开关作用;改变节气阀的开启面积,利用节流作用,控制进入滑阀箱和气缸的气体的压力,来调节锻锤的打击能量。这种调节方法称为质量调节法。锻锤工作时,节气阀一般调节到通路全开的位置。
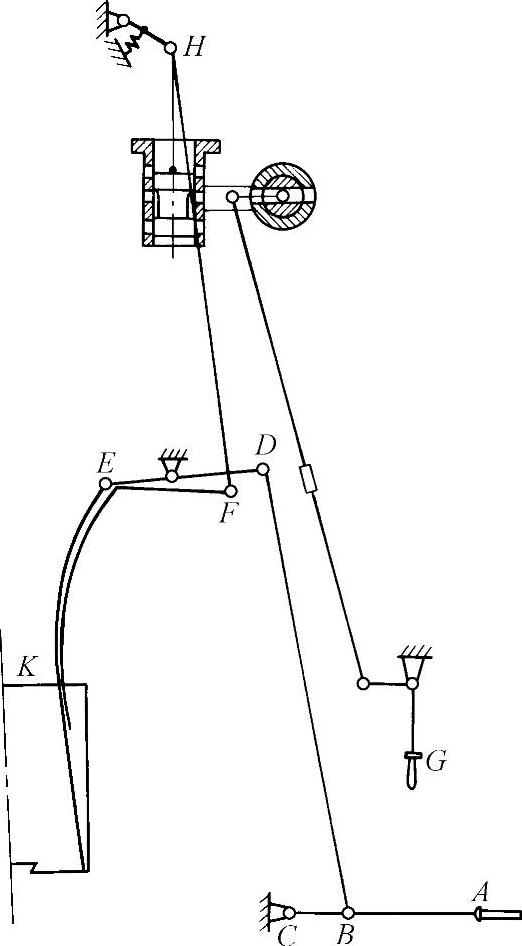
图3-3-7 自由锻锤配气操纵机构
滑阀体是两头直径大、中间直径小的空心圆筒形零件,它在滑阀套筒内上下移动。滑阀套筒上开有三排孔,每排孔沿圆周均匀分布。中间一排孔通过节气阀与进气管道相通。上下两排孔分别与气缸上下腔相通。改变滑阀的位置就可以实现上下腔的进气、排气、膨胀、压缩等不同的气体工作状态。滑阀工作位置如图3-3-8所示。滑阀两头都开有小沟槽,在滑阀处于图3-3-8b位时,使上腔通过小沟槽缓慢地排气,下腔不断补充少量的新蒸汽,以满足锤头悬空时的工作要求。
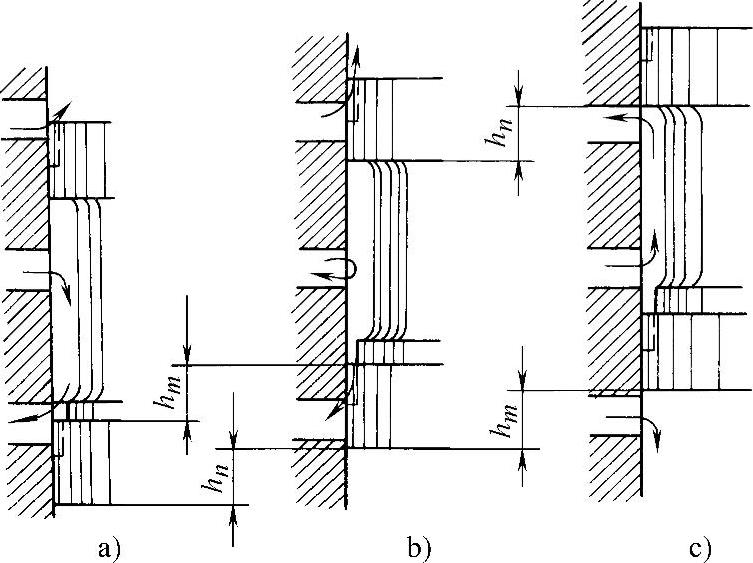
图3-3-8 自由锻锤滑阀工作位置图
2.操纵机构(https://www.xing528.com)
滑阀的移动由图3-3-7中的操纵机构来控制的。可通过操作手柄A的上下移动,也可通过与锤头联动的机械随动机构,实现滑阀的上下移动,实现气缸上、下腔气体预期的工作阶段,使落下部分的运动具有相应的工作状态。
由图3-3-7可知,手动部分是由杆AC、BD、ED、EF和FH组成。当压下手柄A时,杆AC带动杆BD下移,杆ED绕支承点旋转,使E点上移。由于锤头斜面的斜度很小,使杆FH也向上移动,则拉动滑阀向上移动。反之,当手柄由下位提回至水平位置时,带动各杆件下移,使滑阀向下移动。手柄由上极限水平位置移到下极限位置,滑阀相应的移动距离用hn表示(见图3-3-8)。
机械随动部分由锤头、曲杆KEF和杆FH组成。当锤头运动向上时,通过锤头的斜面迫使曲杆KEF绕点E逆时针方向转动,通过杆EF,使杆FH上升,带动滑阀向上移动。反之,当锤头向下运动时,滑阀在弹簧和曲杆作用下下降,在随动系统中,锤头与滑阀的运动方向一致。锤头走全行程Hm时,滑阀相应的位移用hm表示hm=αHm,一般取α=0.04~0.06。
3.工作循环
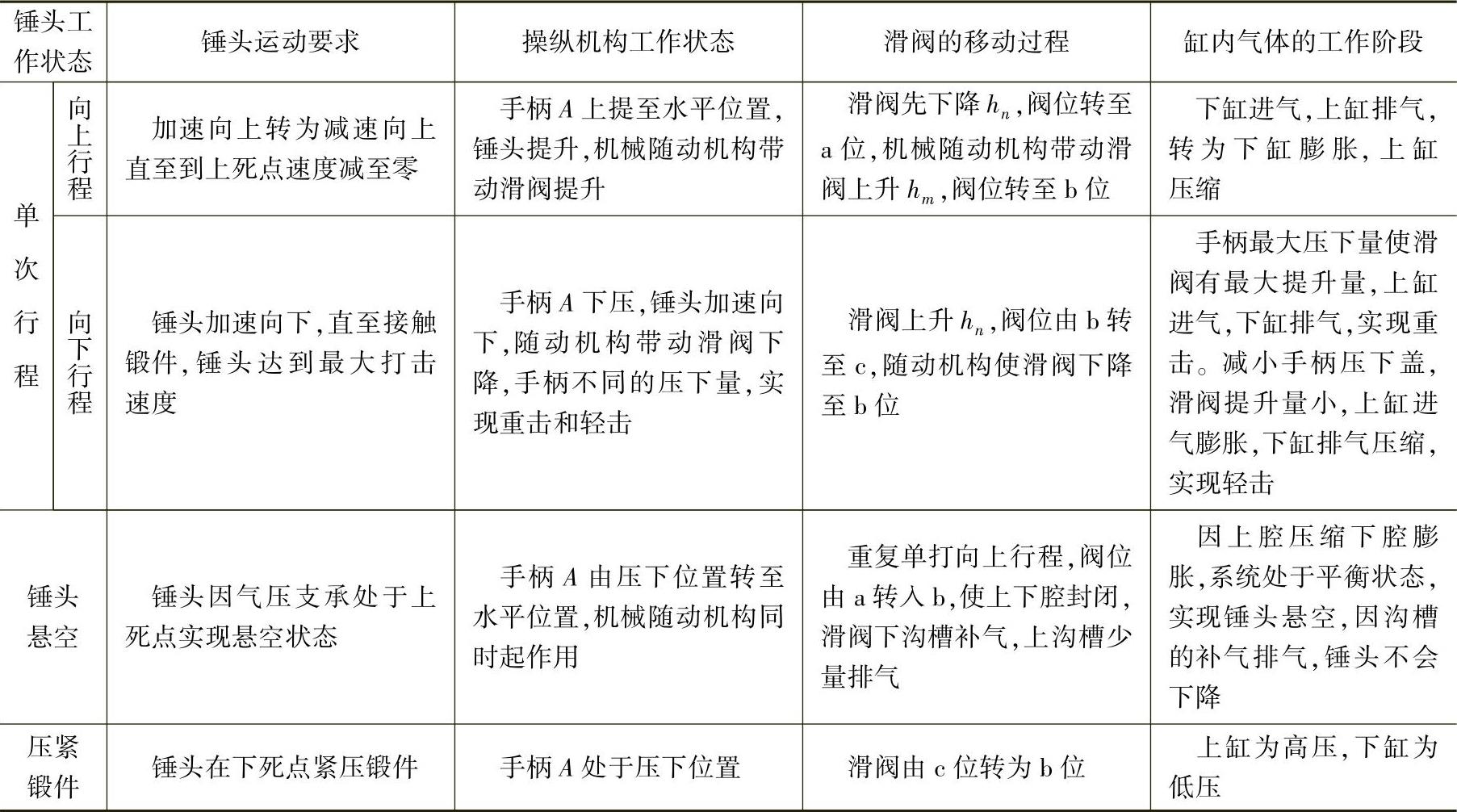
蒸汽-空气自由锻锤应具有打击、锤头悬空、压紧锻件等工作循环。为了实现不同的工作循环,从锤头的运动要求出发,配气操纵机构应呈什么样的工作状态,导致气缸上下腔实现什么样的工作状态和阶段,结合图3-3-7所示的配气操纵机构和图3-3-8所示的滑阀工作位置图,在表3-3-2中有具体的分析和说明。
表3-3-2 蒸汽-空气自由锻锤工作循环分析
锻锤长时间不工作时,进气管闸门及节气阀应关闭,手柄A应处于下极限位置,这时锤头处于下死点,滑阀处于图3-3-8b位。当锻锤短期不工作时,可不关进气管闸门和节气阀,但手柄A仍应处于下极限位置,使锤头保持在下极点不动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。