



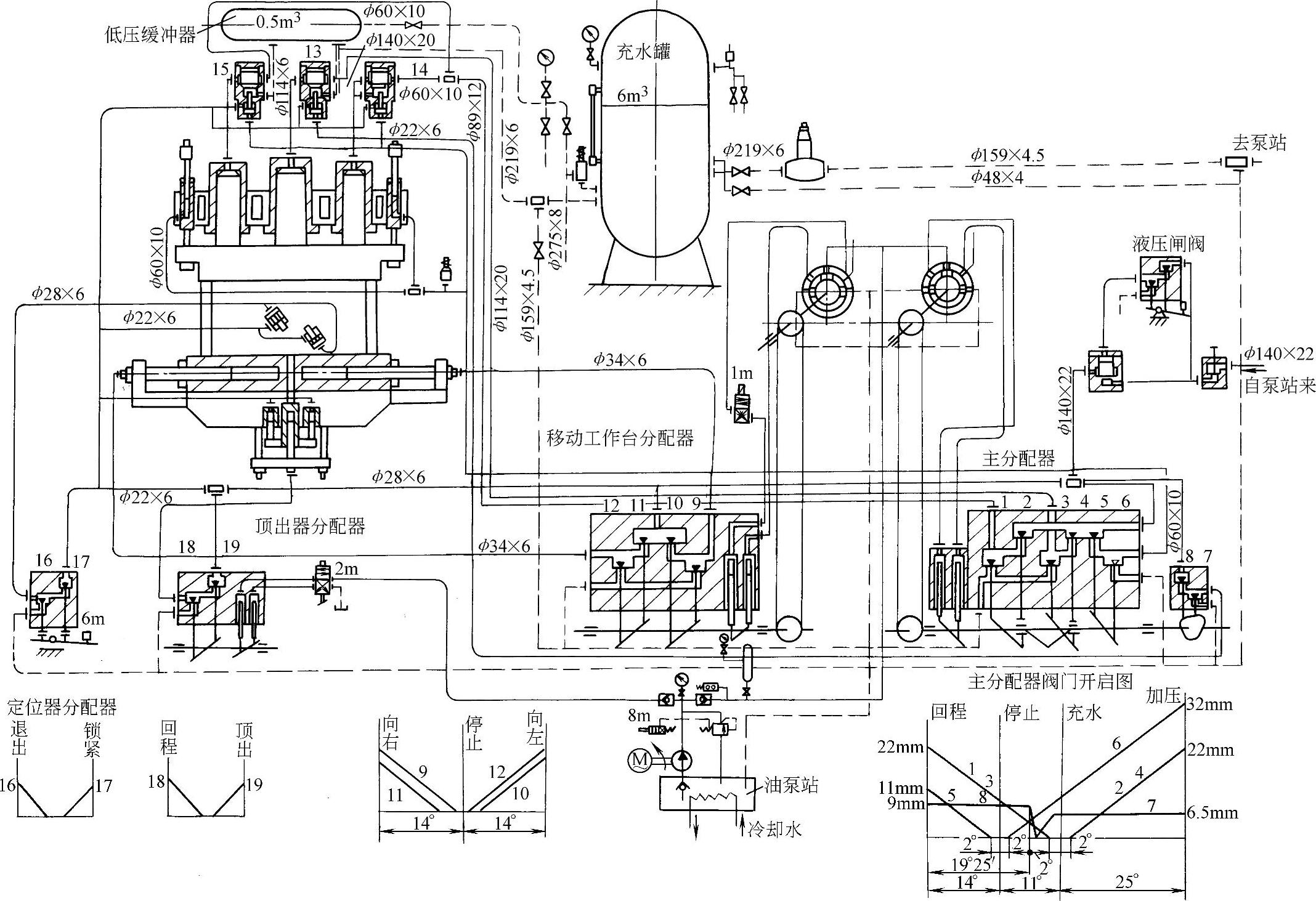
我国各厂已有的锻造水压机中,很多仍使用原有的锥阀,现介绍16MN锻造水压机的液压控制系统,如图1-2-21所示。工作原理如下。
1.充液行程
将操纵手把向前扳到充液行程位置时,通过旋转滑阀,以压力油控制接力器柱塞的运动,使主分配器的摇杆轴作逆时针方向转动(左视),并由钢丝绳将运动反馈回去,组成闭环随动系统。摇杆轴逆时针转动时,将回程缸排水阀6打开,活动横梁靠自重下行,回程缸中的液体经回程缸排水阀6排入充液罐。工作缸上的充液阀则在充液罐和工作缸中液压差作用下自动打开,充液罐中的低压水随着活动横梁的下降大量地进入工作缸,实现活动横梁空程向下的充液行程。
活动横梁下行遇到锻件后,由于工作缸和充液罐中液压差消失,充液阀在弹簧作用下自动关闭,以准备即将进行的工作行程。
为使活动横梁在充液行程终点处平稳地停下,在接近终点时,应降低回程缸排水阀6的开启高度,使活动横梁减速,以减少撞击振动。
2.工作行程
工作行程开始时充液阀应早已自动关闭。当将手把向前扳到工作行程位置时,摇杆轴继续作逆时针方向转动(左视),将工作缸进水阀2和4打开,来自水泵站的高压液体经过进水阀2和4以及充液阀的阀腔进入工作缸,作用于柱塞上,通过活动横梁及上砧对锻件进行压力加工。此时,回程缸排水阀6始终打开,回程缸排液。
3.回程
工作行程完成后,将操纵手把向后扳到回程位置,摇杆轴反向作顺时针方向转动(左视),工作缸排水阀1和3最先打开,卸掉工作缸和管道中高压液的压力,接着中间缸充液阀接力器的进水阀8打开,顶开充液阀13,加速中间缸卸压,然后回程缸进水阀5打开,高压水通向回程缸,同时也通向两侧工作缸充液阀的接力器,顶开充液阀14及15。活动横梁开始回程向上,工作缸中大量液体经充液阀排入低压缓冲器。
4.停止和悬空
将操纵手把扳到停止位置时,工作缸排水阀1和3继续打开,工作缸通低压液体,此时回程缸进水阀5和排水阀6都关闭,回程缸中的液体被封闭于缸中,支承活动横梁的重量,从而活动横梁可停在行程中的任意位置。
整个锻造过程完成后,应将活动横梁停在下砧上,而将手把扳到停止位置。
为了可以进行压力分级,锻造液压机一般做成三缸结构,根据锻件大小和不同的工艺要求,可以选用不同的工作压力,因此在操纵系统中也应有相应的压力分级机构。在图1-2-20中,采用手把拨叉机构进行压力分级(示意图),如将手把拨叉扳到一侧,仅进水阀2能打开,中间缸通高压液体,为一级压力;将手把拨叉扳到另一侧,仅进水阀4能打开,两侧缸通高压液体,为二级压力;将手把拨叉扳到中间位置时,进水阀2和4都能打开,所有工作缸都通高压液体,则为三级(全)压力。
 (https://www.xing528.com)
(https://www.xing528.com)
图1-2-21 16MN锻造水压机液压控制系统原理图
1—侧缸排水阀 2—侧缸进水阀 3—中间缸排水阀 4—中间缸进水阀5—回程缸进水阀 6—回程缸排水阀 7—充液阀接力器排水阀 8—充液阀接力器进水阀 9、12—工作台推动缸排水阀 1O、11—工作台推动缸进水阀 13、14、15—充液阀 16—定位器排水阀 17—定位器进水阀 18—顶出器排水阀 19—顶出器进水阀
由另外一套旋转滑阀随动系统控制的四阀分配器来实现工作台的移动。锁紧工作台用的定位器、工作台及顶出器三者之间设置有电液联锁安全装置。在定位器完全退出的位置上设有行程开关,只有在定位器完全退出后,它的常闭触头起作用,1M电磁铁通相应的两位二通阀开启,这时扳动旋转滑阀小手柄才能控制移动工作台运动,否则,即使扳动小手柄工作台也不会运动。而只有当定位器将移动工作台锁紧后,电磁铁2M才通电,开启相应的两位二通阀,顶出器才能动作。
上述操纵系统中采用的旋转滑阀式钢丝绳轮反馈的液压随动系统如图1-2-22所示,它由小手柄旋阀、钢丝绳轮机构、接力器液压缸及液压泵动力站等组成。
操作小手把6与阀芯1刚性连接,阀套2与绳轮4的轴刚性连接。阀套2与阀芯1及阀体3之间的圆周间隙均为0.01~0.015mm。接力器液压缸5有两个工作柱塞腔b和c,当其分别进油或排油时,可推动分配器摇杆轴(传动轴)摆动。
当小手把6处在停止位置时,阀芯1与阀套2处于平衡位置,工作边K1、K2、K3、K4均关闭,接力器液压缸5的两个柱塞腔b和c均不进油或排油(见图1-2-22中的B—B和C—C剖面),故分配器传动轴也处于停止位置。由于对随动精度的要求不高,滑阀阀口各工作边制成较大的遮盖量,其值为0.5~1mm。
当小手把6向前转动某一角度时,阀芯1随之转动(设在剖面B—B和C—C中,阀芯作顺时针方向转动),工作边K1和K2打开,b腔排油,而c腔进高压油,带动分配器传动轴作相同方向转动(顺时针方向,右视),通过钢丝绳及绳轮机构将运动反馈回去,使阀套2也作同向转动,一直转到和阀芯1转的角度相同时为止,阀套2与阀芯1又重新处在新的平衡位置,各工作边均关闭,b、c腔均不进油或排油,分配器传动轴在随着小手把转动了同一角度后也停止不动。若小手把继续向前推动,则阀芯1与阀套2的随动过程也在不断进行,分配器的传动轴也不断跟随同向转动。
从上述工作原理可以看出,一个液压随动系统一般由操作元件(小手把)、控制元件(旋转滑阀)、力放大器或功率放大器(接力器液压缸)、信号反馈机构(钢丝绳轮机构)和执行元件(分配器传动轴)等组成,图1-2-23为其组成原理框图。
液压随动系统具有以下特点:
1)执行机构(输出)能自动地跟随输入信号的变化而动作,如作为执行机构的分配器传动轴能自动地跟随作为输入信号的小手把动作而动作,这种系统又叫“伺服系统”。
2)具有力或功率的放大作用,当手把以10~20N力轻轻转动时,通过系统中力和功率的放大,能使分配器传动轴以较大的力矩转动,所以它又是一个力和功率的放大系统。
3)执行机构只有在输出信号与输入信号有差异时才动作,它一面带动工作机构运动,一面又将其动作作为信号反馈给系统,以消除输出与输入信号之间的差异。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。