



【摘要】:按所接的电源不同,电动机可分为直流电动机和交流电动机两大类,它们的原理都是利用载流矩形线圈在磁场中会受到一对力偶的作用而旋转,但其本质仍然是磁场对载流直导体会产生力的作用。如图4-35所示为直流电动机的工作原理,它与交流电动机的主要区别是直流电动机在电流的输入、输出口处设计了一个称为换向器的装置,利用换向器来自动改变线圈中的电流方向,从而使线圈受力方向一致而连续旋转。f0j原则上可由光路计算得出。
在现代光学镜头的优化设计中,将所有镜头结构参数,即镜头诸面的面形参数、各透镜的厚度和透镜间的间隔、各透镜的材料参数统称为自变量。而将镜头的焦距、横向放大率、后工作距等,以及各类几何像差、波像差等都称为像差,即广义像差。它们都是结构参数的函数。
镜头的结构参数用xi(i=1,2,…,n)表示,广义像差用fj(j=1,2,…,m)来表示,即

式(1-1)是一组非常复杂的非线性函数关系式,几乎不可能写出它们的显式关系。但在已知的初始结构参数处及其附近,广义像差与结构参数的关系是可以近似为线性关系的,因而能写出如下的显式:(https://www.xing528.com)
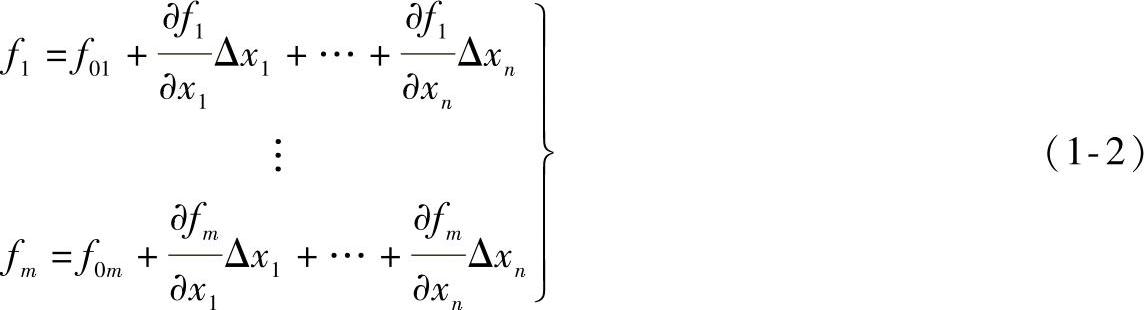
式(1-2)中,f0j是初始结构参数为x0i时的广义像差,这里:j=1,2,…,m;i=1,2,…,n。f0j原则上可由光路计算得出。fj是当结构参数变为xi=x0i+Δxi时的广义像差,各偏导数原则上可由基于光路计算的差商求得。当以一个初始结构为基础校正像差时,总是需要提出像差要达到的目标值fj′,这个目标值往往不是一步求得的,因为事实上办不到,众所周知其原因是用线性化方法解非线性问题是有很大限制的,解决的方法是分成若干步逐步迭代。设(fj-f0j)是要求广义像差减少量(fj′-f0j)的若干分之一,则式(1-2)就近乎实际地表达了解空间的情况。一般来说,广义像差的个数m并不总是与结构参数的总数n相等,分m≤n和m>n两种情况分别讨论。下面先讨论m≤n的情况。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。