



在机构模式下建立所需的力/扭矩,可以真实模拟对机构运动的外部影响。所述的力/扭矩通常表示机构与另一主体的动态交互作用,并且是在机构的零件与机构外部实体接触时产生的。力总表现为推力或拉力,它可导致对象更改其平移运动。
建立力/扭矩的一般方法及步骤如下。
1)在功能区“机构”选项卡的“插入”组中单击“力/扭矩”按钮 ,打开图5-44所示的“力或扭矩定义”对话框。
,打开图5-44所示的“力或扭矩定义”对话框。

图5-44 “力或扭矩定义”对话框
2)在“名称”文本框中指定力或扭矩的名称。
3)在“类型”选项组的下拉列表框中,选择“点力”“主体扭矩”和“点对点力”三个选项之一,接着选取相应的参考图元。
●“点力”选项:选取主体上的某一点,接着选择另一点或顶点作为参考图元。
●“主体扭矩”选项:为通过质心的扭矩选取主体作为参考图元。
●“点对点力”选项:选取位于不同主体上的两点或顶点作为参考图元。该力在反方向上作用相等,其值为负时,彼此相对移动两点;其值为正时,彼此远离移动两点。如果两点重合,则该力的模为零。第一个点是力的原点,第二个点则指示了力的方向。创建力时,将显示作用于选择的第一个主体上的力的结果。
4)设置力或扭矩的“模”。在“模”选项卡中,选择所需要的函数类型,如“常数”“表”“用户定义”和“自定义载荷”,然后为指定的函数类型设置相应的参数值或其他。
●“常数”选项:将模设置为常数值,需要在“常数”选项组的文本框中输入模值。
●“表”选项:用最多可包含三列的表中的值来生成模。第一列包含自变量x的值,该变量可与时间或测量有关。第二列包含因变量的值,该变量表示力或扭矩的模。如果模是单调的,则会有第三列。选择“表”选项时,如图5-45所示,单击“向表中添加行”按钮 向表中添加一行,并为函数选取变量以及输入需要的数值。如果使用“从表中删出行”按钮
向表中添加一行,并为函数选取变量以及输入需要的数值。如果使用“从表中删出行”按钮 ,则可以从表中删除选定行。另外,在“插值”选项组中可以选择“线性”“样条拟合”或“单调拟合”单选按钮来定义插值方案。
,则可以从表中删除选定行。另外,在“插值”选项组中可以选择“线性”“样条拟合”或“单调拟合”单选按钮来定义插值方案。
●“用户定义”选项:利用用户创建的函数生成模。选择该选项时,可以在“用户定义的”选项组中,单击“添加表示式段”按钮 向表中添加行,并设置表达式和取值区域,如图5-46所示。注意另两个按钮,即“删除表示式段”按钮
向表中添加行,并设置表达式和取值区域,如图5-46所示。注意另两个按钮,即“删除表示式段”按钮 和“编辑表示式段”按钮
和“编辑表示式段”按钮 。(https://www.xing528.com)
。(https://www.xing528.com)

图5-45 选择“表”选项

图5-46 选择“用户定义”选项
●“自定义载荷”选项:将复杂的、外部定义的载荷集应用于模型。
5)切换到“方向”选项卡,如图5-47所示。定义力/扭矩矢量方向的方式有三种,分别是“输入的矢量”“直边、曲线或轴”和“点到点”。在“方向相对于”选项组中,可以指定方向是相对于基础的还是相对于主体的。
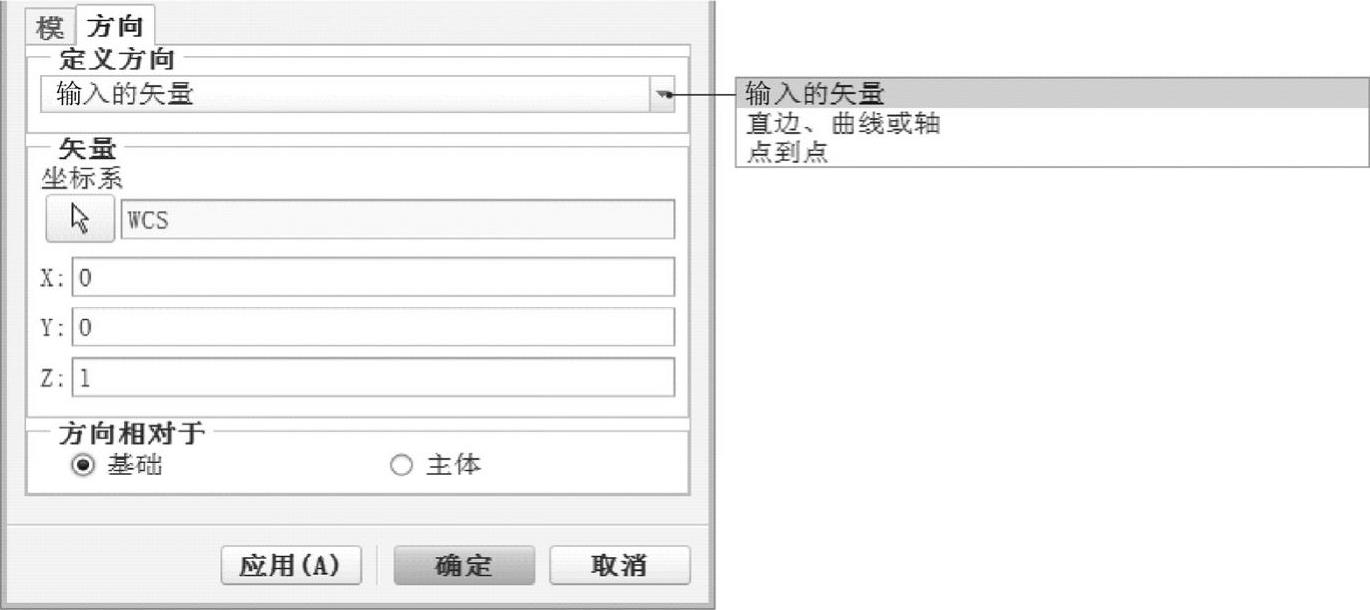
图5-47 “方向”选项卡
●“输入的矢量”选项:选择坐标系并输入坐标以指示矢量的方向。
●“直边、曲线或轴”选项:在主体上选取直边、曲线或轴,沿着或平行于选定的方向放置矢量。可以执行“反向”按钮来反转力/扭矩的方向。
●“点到点”选项:选取主体上的两个点或顶点来指示向量的方向。可以执行“反向”按钮来反转力/扭矩的方向。
6)单击“确定”按钮,完成力/扭矩的定义。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。