



为了让读者了解机构分析的基本步骤,产生对机构运动分析的初步整体印象,先介绍一个典型的机构运动体验实例。该实例所用到的源文件位于随书光盘CH5→TSM_5_1文件夹中。该实例将构造一个连杆装置,并对其进行机构运动分析。
下面是该体验实例的具体操作步骤。
步骤1:建立装配文件并创建用来定位连杆的轴线。
1)单击“新建”按钮 ,打开“新建”对话框。在“类型”选项组中选择“装配”单选按钮,在“子类型”选项组中选择“设计”单选按钮,输入装配名称为tsm_5_1,取消勾选“使用默认模板”复选框,单击“确定”按钮。
,打开“新建”对话框。在“类型”选项组中选择“装配”单选按钮,在“子类型”选项组中选择“设计”单选按钮,输入装配名称为tsm_5_1,取消勾选“使用默认模板”复选框,单击“确定”按钮。
2)在弹出的“新文件选项”对话框中选择mmns_asm_design,单击“确定”按钮。
3)设置在模型树中增加显示“特征”及“放置文件夹”项目。
4)在功能区“模型”选项卡的“基准”组中单击“基准轴”按钮 ,弹出“基准轴”对话框。结合〈Ctrl〉键选择ASM_RIGHT基准平面和ASM_TOP基准平面作为参考,单击“确定”按钮,在这两个平面的相交处建立一个基准轴AA_1。
,弹出“基准轴”对话框。结合〈Ctrl〉键选择ASM_RIGHT基准平面和ASM_TOP基准平面作为参考,单击“确定”按钮,在这两个平面的相交处建立一个基准轴AA_1。
5)使基准轴AA_1处于非选中状态,单击“基准轴”按钮 ,弹出“基准轴”对话框。选择图5-4的参考和偏移参考,单击“确定”按钮,即在ASM_TOP基准平面上创建了基准轴AA_2,该基准轴距离基准轴AA_1为50,注意AA_2位于ASM_RIGHT基准平面的所在侧。
,弹出“基准轴”对话框。选择图5-4的参考和偏移参考,单击“确定”按钮,即在ASM_TOP基准平面上创建了基准轴AA_2,该基准轴距离基准轴AA_1为50,注意AA_2位于ASM_RIGHT基准平面的所在侧。

图5-4 建立基准轴AA_2
步骤2:连接装配。
1)在“元件”组中单击“组装”按钮 ,弹出“打开”对话框,选择tsm_5_1_1.prt,单击“打开”按钮。
,弹出“打开”对话框,选择tsm_5_1_1.prt,单击“打开”按钮。
2)在“元件放置”选项卡的“预定义集”下拉列表框中选择“销”选项,接着进入“放置”滑出面板。选择装配中的AA_1基准轴和tsm_5_1_1.prt元件的A_4轴;接着选择装配的ASM_FRONT基准平面和tsm_5_1_1.prt元件的DTM3基准平面,此时如图5-5所示。
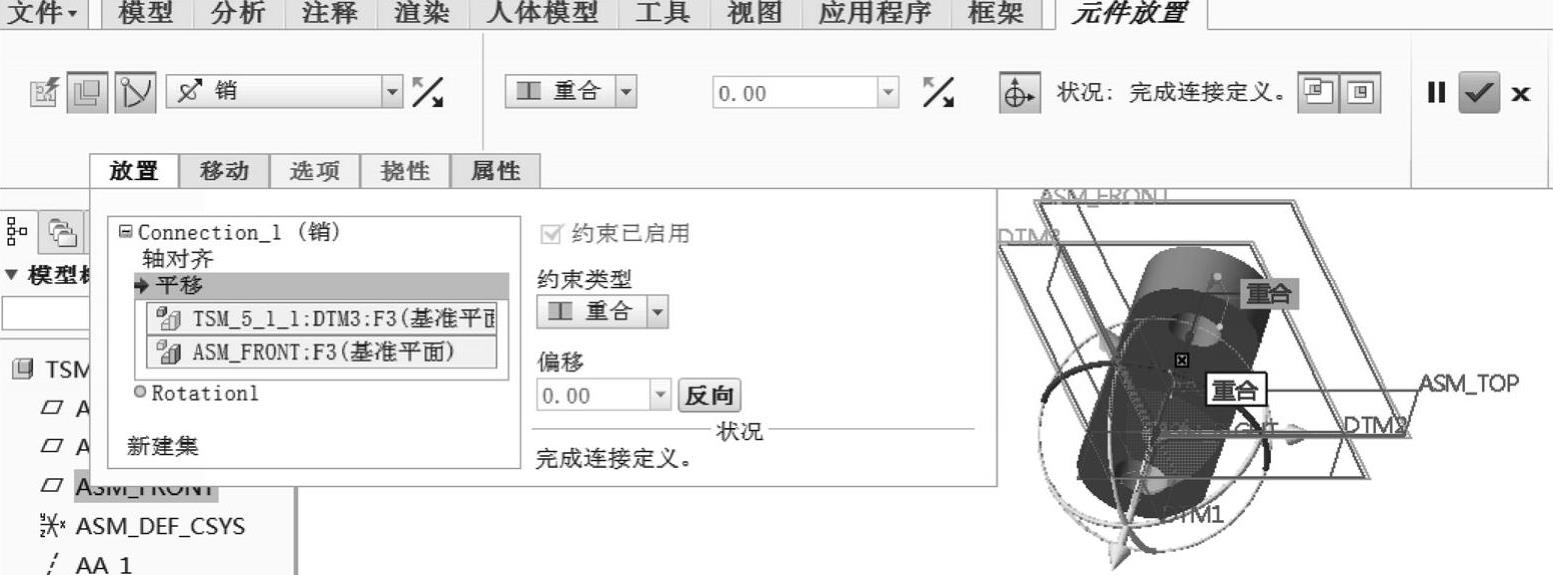
图5-5 定义销钉连接
在“元件放置”选项卡中单击“完成”按钮 。
。
3)在“元件”组中单击“组装”按钮 ,弹出“打开”对话框,选择tsm_5_1_2.prt,单击“打开”按钮。
,弹出“打开”对话框,选择tsm_5_1_2.prt,单击“打开”按钮。
4)在“元件放置”选项卡的“预定义集”下拉列表框中选择“销”选项。打开“放置”滑出面板,选择装配中tsm_5_1_1.prt的A_3轴和元件tsm_5_1_2.prt的A_4轴;接着选择装配中tsm_5_1_1.prt元件的DTM3基准平面和tsm_5_1_2.prt元件的DTM3基准平面。单击“完成”按钮 ,此时装配如图5-6所示。
,此时装配如图5-6所示。
5)在“元件”组中单击“组装”按钮 ,弹出“打开”对话框,选择tsm_5_1_3.prt,单击“打开”按钮。
,弹出“打开”对话框,选择tsm_5_1_3.prt,单击“打开”按钮。
6)在“元件放置”选项卡的“预定义集”下拉列表框中选择“销”选项。打开“放置”滑出面板,选择装配中tsm_5_1_2.prt的A_3轴和元件tsm_5_1_3.prt的A_3轴;接着选择装配中tsm_5_1_2.prt元件的DTM3基准平面和元件tsm_5_1_3.prt的DTM3基准平面,完成该连接定义。
7)在“放置”滑出面板中,单击“新建集”,增加一个“销”联接,选择装配中的AA_2基准轴和元件tsm_5_1_3.prt的A_4轴,接着选择装配中的ASM_FRONT基准平面和元件tsm_5_1_3.prt的DTM3基准平面。单击“完成”按钮 ,完成装配的连接装配,如图5-7所示。
,完成装配的连接装配,如图5-7所示。
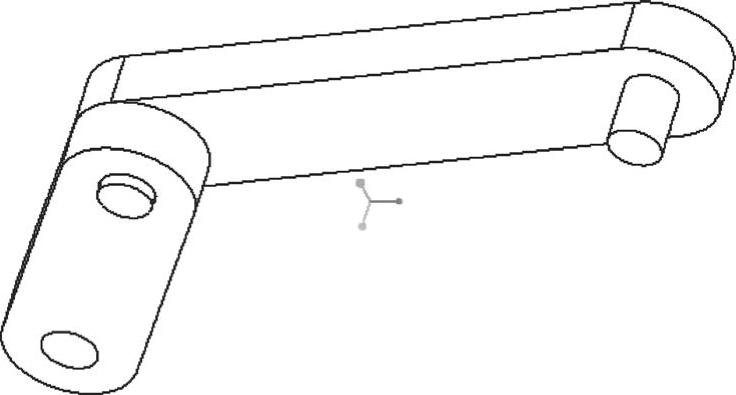
图5-6 装配
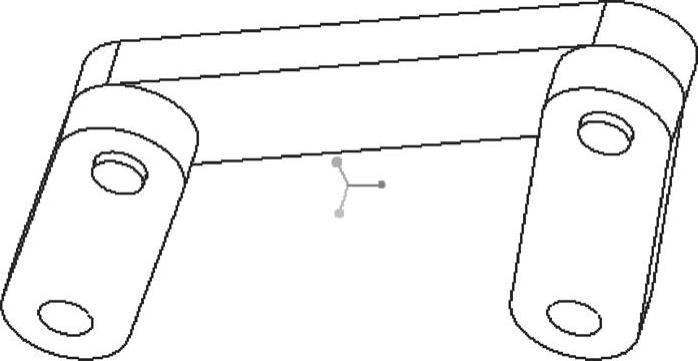
图5-7 连接装配效果
步骤3:定义伺服电动机。
1)在功能区中切换至“应用程序”选项卡,从该选项卡的“运动”组中单击“机构”按钮 ,进入机构模式。此时在连杆组件模型中显示出销钉联接的图标,如图5-8所示。
,进入机构模式。此时在连杆组件模型中显示出销钉联接的图标,如图5-8所示。
2)在功能区“机构”选项卡的“插入”组中单击“伺服电动机”按钮 ,打开图5-9所示的“伺服电动机定义”对话框。
,打开图5-9所示的“伺服电动机定义”对话框。
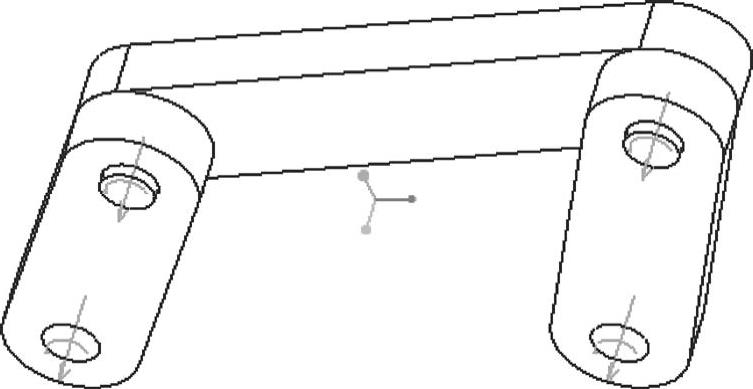
图5-8 进入机构模式

图5-9 “伺服电动机定义”对话框
3)接受默认的名称为ServoMotor1,选择图5-10左下角的连接轴。
说明:在图形窗口中,默认时,运动方向由洋红色箭头显示,驱动图元(主体1)以橙色加亮。单击“伺服电动机定义”对话框中的“反向”按钮,可以反转伺服电动机的运动方式。
4)单击“轮廓”标签,进入“轮廓”选项卡。在“模”选项组中选择“斜坡”选项,设置A值为50,B值为20,如图5-11所示。

图5-10 选择连接轴(https://www.xing528.com)

图5-11 定义参数
5)在“图形”选项组中,单击“绘制所选电动机轮廓相对于时间的图形”按钮 ,则打开图5-12所示的“图形工具”窗口,以图形的形式描述特定的驱动参数,关闭该图形窗口。
,则打开图5-12所示的“图形工具”窗口,以图形的形式描述特定的驱动参数,关闭该图形窗口。
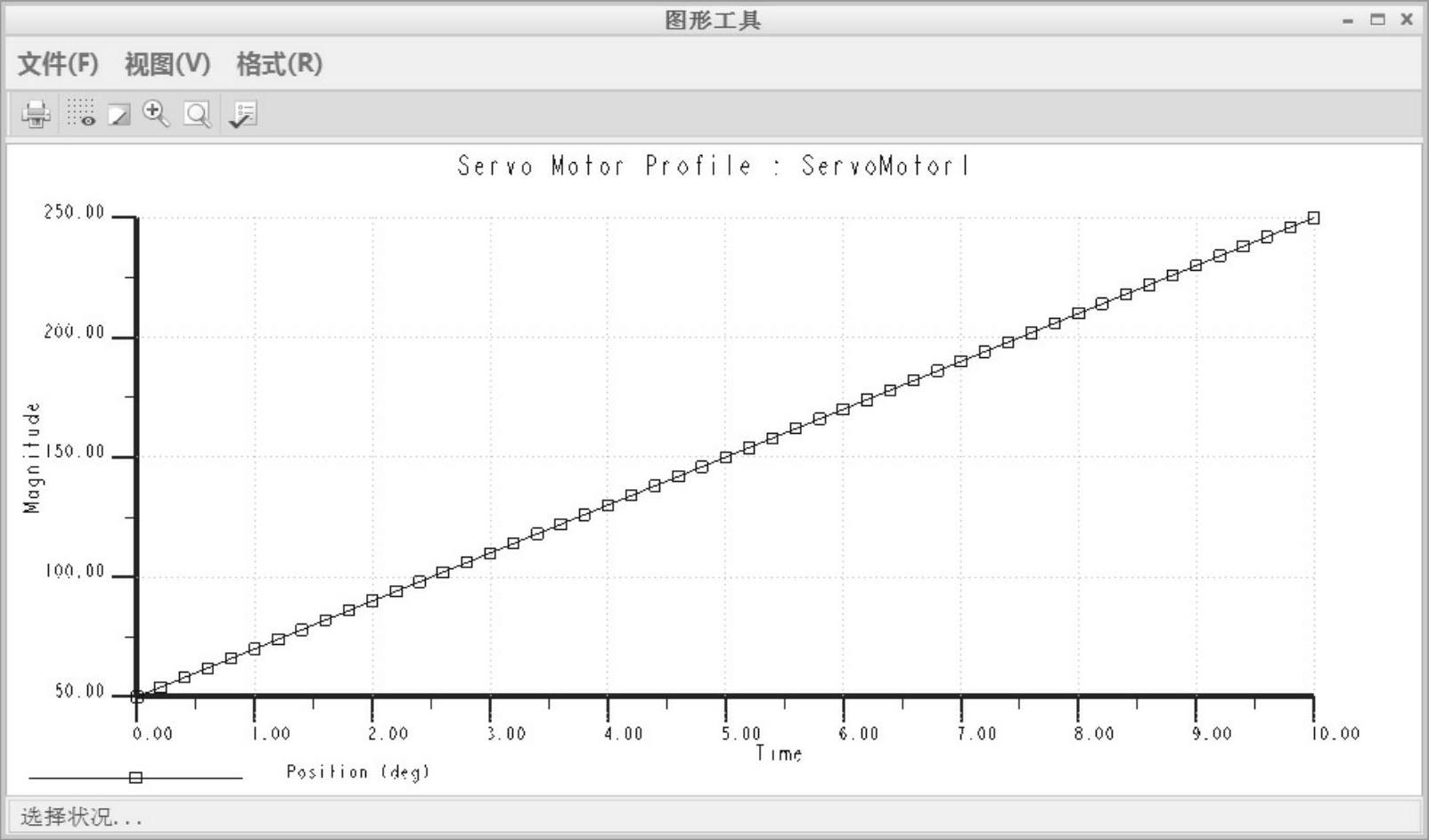
图5-12 “图形工具”窗口
6)在“伺服电动机定义”对话框中单击“应用”按钮后再单击“确定”按钮,此时连杆组件模型如图5-13所示。

图5-13 定义了伺服电动机
步骤4:定义运动学分析。
1)在“分析”组中单击“机构分析”按钮 ,弹出“分析定义”对话框。
,弹出“分析定义”对话框。
2)接受默认的分析名称为AnalysisDefinition1,在“类型”选项组的下拉列表框中选择“运动学”选项。
3)在“首选项”选项卡上,选择“长度和帧频”选项,设置“开始时间”为0,End Time为20,该选项卡上的其他选项如图5-14所示。
4)切换到“电动机”选项卡,可以看到之前建立的伺服电动机ServoMotor1作为动力源,如图5-15所示。
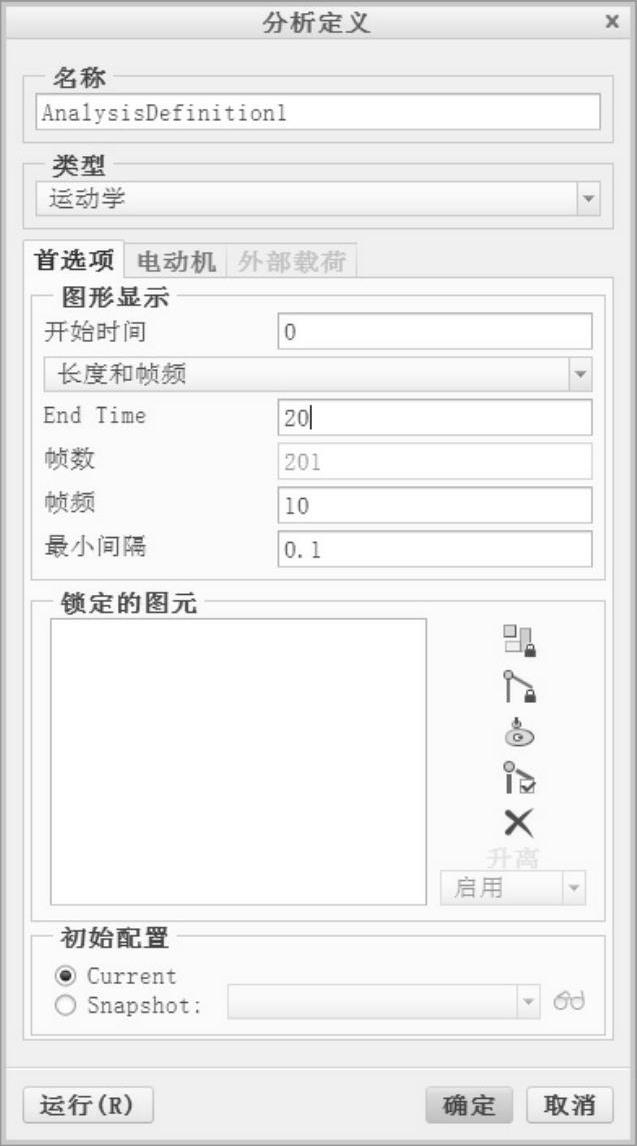
图5-14 “分析定义”对话框

图5-15 指定的动力源
5)在“分析定义”对话框中单击“运行”按钮,机构便按照设定的条件进行运行计算,运算的一个截图效果如图5-16所示。

图5-16 运行计算
6)单击“确定”按钮。
步骤5:回放以前运行的分析。
1)在“分析”组中单击“回放”按钮 ,打开图5-17所示的“回放”对话框。
,打开图5-17所示的“回放”对话框。
2)单击“碰撞检测设置”按钮,打开图5-18所示的“碰撞检测设置”对话框。利用该对话框可以设置无碰撞检测、全局碰撞检测、部分碰撞检测。这对检查机构运动时的干涉情况十分有用。
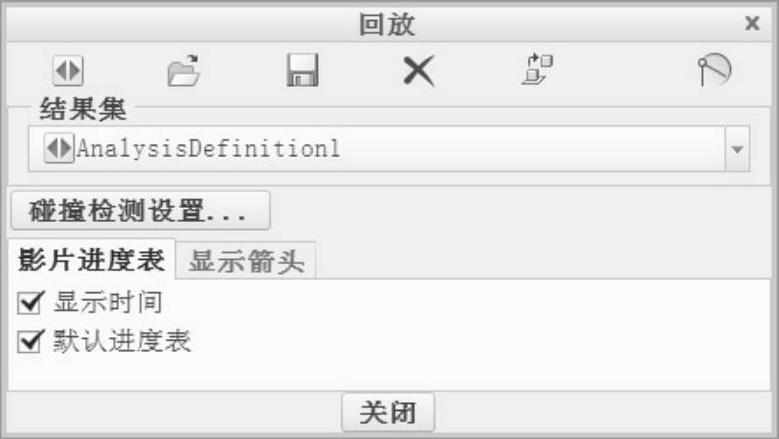
图5-17 “回放”对话框

图5-18 “碰撞检测设置”对话框
设置好所需的碰撞(冲突)检测选项后,单击“碰撞检测设置”对话框的“确定”按钮。
3)单击“回放”对话框的“播放当前结果集”按钮 ,弹出图5-19所示的“动画”对话框。在该对话框中,通过拖动滑块的方式设置动画播放的速度,选中“重复播放动画”按钮
,弹出图5-19所示的“动画”对话框。在该对话框中,通过拖动滑块的方式设置动画播放的速度,选中“重复播放动画”按钮 可以设置重复播放动画,单击“在结束时反转方向”按钮
可以设置重复播放动画,单击“在结束时反转方向”按钮 则可以设置在结束时以反转方向的形式播放动画。
则可以设置在结束时以反转方向的形式播放动画。
单击“捕获”按钮,弹出图5-20所示的“捕获”对话框。从“类型”选项组中,可以指定以MPEG、JPEG、TIFF、BMP或AVI格式保存录制结果。

图5-19 “动画”对话框

图5-20 “捕获”对话框
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。