



1.滞环控制
滞环控制也叫Bang-Bang控制或纹波调节器控制,即将输出电压维持在内部参考电压为中心的滞环宽度内。滞环控制属于闭环电流跟踪控制方法,最初用于控制电压型逆变器的交流电流输出,是最简单的电流控制方式。采用滞环控制可以使网侧功率因数为1,且不产生无功功率和谐波电流。滞环控制同时兼有两种功能:①作为电流调节器;②起PWM调节器的作用,可以获得很宽的电流频宽。滞环控制无需外加调制信号,检测的变量是电感电流,控制电路设有一个滞环逻辑控制器,有一个电流滞环带。滞环带的带宽决定了电流纹波的大小,它可以取固定值,也可以与瞬时平均电流成正比。滞环控制的原理图如图4-31所示。

图4-31 滞环控制的原理图
滞环电流控制的特点是:控制方式简单、动态响应快、具有内在的电流限制能力。电流滞环瞬时比较控制不依赖于变流器系统的数学模型、系统参数,从而也不需要对系统模型进行近似和简化处理。但是,滞环控制的开关频率不固定,使电路工作可靠性下降,输出电压的频谱变差,对系统性能不利。
2.无差拍控制
无差拍控制最先是由卡尔曼提出的,它是一种基于被控制对象准确数学模型的控制方法。无差拍控制的基本思想是根据逆变器的状态方程和输出反馈信号(通常是输出滤波电容的电压和电流)推算出下一个开关周期的PWM脉冲宽度。PWM脉冲宽度是根据当前时刻状态矢量和下一采样时刻的参考正弦值计算出来的。因此,从理论上可以使输出电压在相位和幅值上都非常接近参考电压,由负载变化或非线性负载引起的输出电压误差可在一个开关周期内得到校正。无差拍控制要求控制脉宽必须在当拍计算当拍输出,否则不仅会破坏控制特性,甚至还会影响系统的稳定性。由于采样和计算延时,要做到当拍计算当拍输出必然使输出脉冲的占空比受到限制,这就降低了输入直流电压的利用率。无差拍控制的控制参数与输出滤波器参数、直流母线电压以及负载息息相关,只要它们当中的一个发生变化,控制参数就得进行相应的调整,否则就会导致控制失效,所以无差拍控制系统的鲁棒性很差。
3.滑模控制
滑模控制是一种非线性控制,这种控制的特点是控制的非连续性,它使系统在一定条件下沿着规定的轨迹做高频率、小振幅的上下运动。滑模控制的原理是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制,如图4-32所示。由于系统的特性和参数只取决于设计的切换超平面而与外界干扰没有关系,所以滑模控制具有很强的鲁棒性。超平面的设计方法有极点配置,特征向量配置设计法,最优化设计方法等,所设计的切换超平面需满足达到条件,即系统在滑模平面后将保持在该平面的条件。控制器的设计有固定顺序控制器设计、自由顺序控制器设计和最终滑动控制器设计等设计方法。
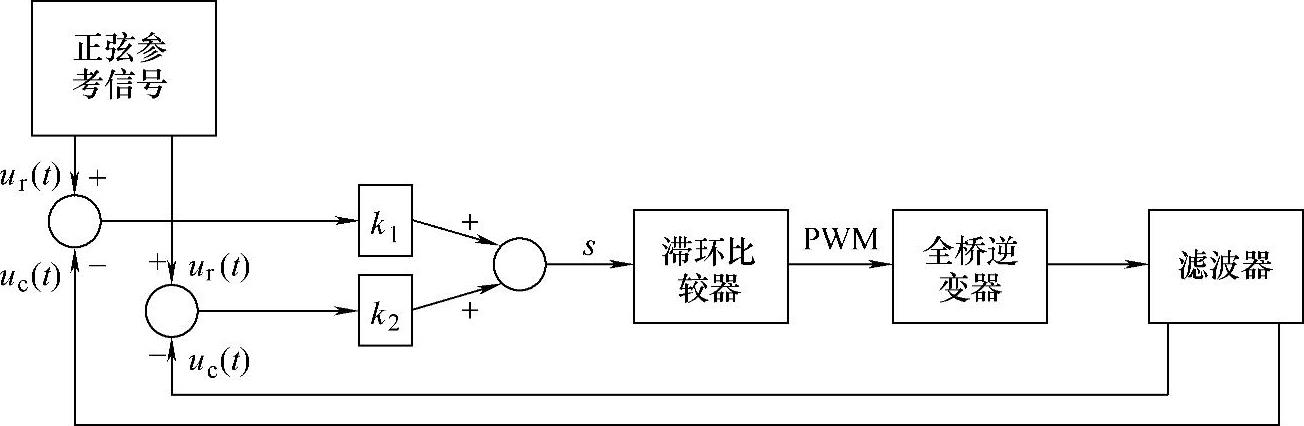
图4-32 滑模控制框图
这种控制既可以用于线性系统也可以用于非线性系统。对于连续系统,由于控制的不连续使其变为非线性系统;对于非连续系统,不仅有非连续特性还包含有非线性系统的动力学特性。这种控制方法具有很强的鲁棒性,但也存在控制系统稳态效果不佳、理想滑模切换面难于选取、控制效果受采样率的影响等弱点。
4.重复控制
重复控制是一种基于内模原理的控制方法,内模原理是把作用于系统的外部信号的动力学模型植入控制器以构成高准确度反馈控制系统的一种设计原理,如图4-33所示。逆变器采用重复控制的目的是为了消除因整流桥负载引起的输出电压波形周期性畸变。其控制思想是假定前一周期出现的输出电压波形畸变将在下一周期的同一时刻再次出现,控制器根据参考信号和输出电压反馈信号的误差来确定所需的校正信号,然后,在下一个基波周期将此校正信号叠加在原控制信号上,这样就可以消除输出电压的周期性畸变。(https://www.xing528.com)
重复控制器可以消除周期性干扰产生的稳态误差,但由于重复控制延时一个工频周期的控制特点,使得单独使用重复控制的变流器动态特性极差,无法满足变流器的指标要求。
5.模糊控制
模糊控制属于智能控制的范畴。系统的复杂性和模型的准确性总是存在着矛盾,许多控制方法都要求有被控对象的准确模型,而模糊控制器的设计不需要被控对象的准确数学模型,因此,其具有很强的鲁棒性和自适应性。模糊控制有三个基本组成部分,即模糊化、模糊决策和精确化计算。其工作过程可简单描述为:首先将信息模糊化,然后经模糊推理规则得到模糊控制输出,最后将模糊指令进行精确化计算最终输出控制值。模糊控制需知道输入输出间的数学依存关系,给定一个输入,便可以根据控制规则表得到一个合适的输出,控制算法简单、计算时间较少。逆变器采用模糊控制有利于提高控制的实时性,改善逆变器输出电压波形质量。模糊控制主要依赖模糊规则和模糊变量的隶属度函数。如果对信息进行简单的模糊化处理会导致被控系统控制准确度的降低和动态品质变差,为了提高系统准确度必然要增加量化等级,这样就使得规则迅速增多,影响了规则库的最佳生成,而且会增加系统的复杂性和推理时间。变流器模糊控制原理图如图4-34所示。
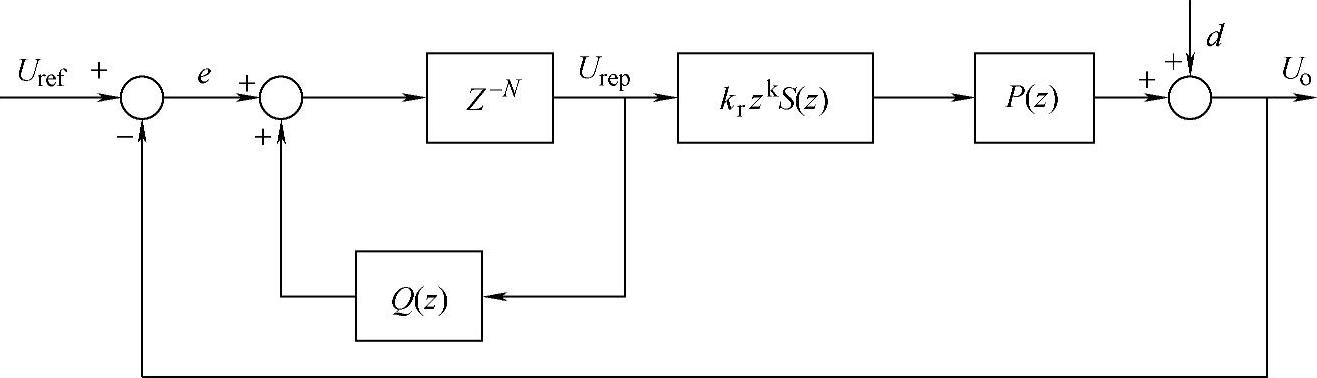
图4-33 重复控制框图
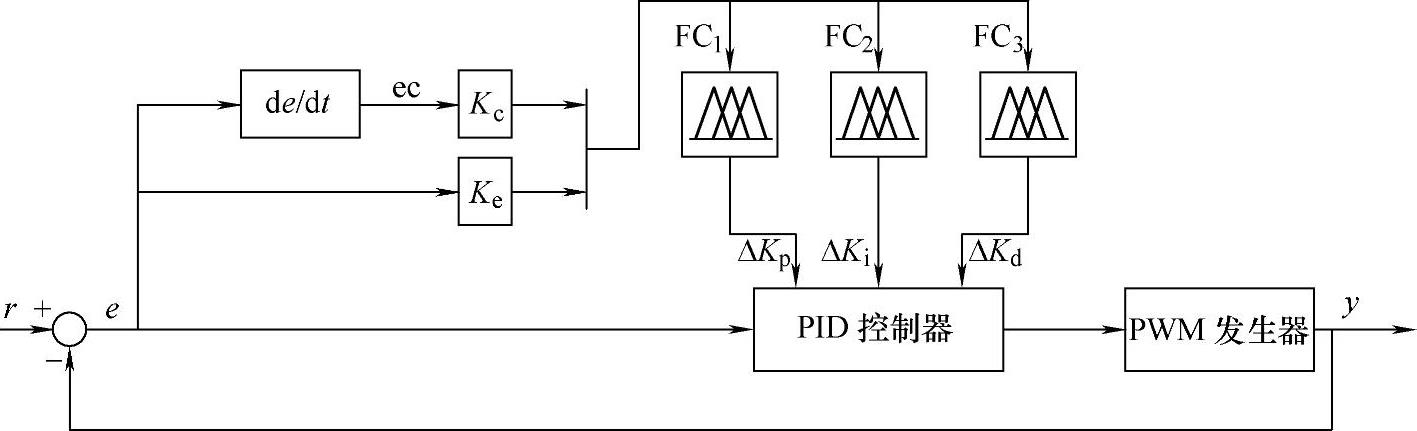
图4-34 变流器模糊控制原理图
模糊控制主要用于滞后系统、非线性系统、时变系统,该控制不要求知道系统的准确数学模型,根据控制量的数可分为一维模糊控制器、二维模糊控制器和三维模糊控制器。模糊控制类似于传统的PD控制,因而,该控制有很快的响应速度,但是其静态特性不令人满意。
6.神经网络控制
神经网络控制是模拟人脑神经中枢系统智能活动的一种控制方式。神经网络具有非线性映射能力、并行计算能力和较强的鲁棒性等优点,已广泛地应用于控制领域,尤其是非线性系统领域。随着神经网络控制芯片的出现,一些学者正在研究神经网络控制在逆变电源中的应用,目前在神经网络结构的设计、学习算法等方面已取得了一定成果。神经网络自整定PI控制器如图4-35所示。

图4-35 神经网络自整定PI控制器
由于硬件系统的限制,目前神经网络控制还无法实现对逆变器输出电压波形进行在线控制,多数应用都是采用离线学习获得优化的控制规律,然后利用得到的规律实现在线控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。