



此例产品是一个水壶把手,模具结构如图8-17所示。此产品造型较特殊,模具结构非常复杂,向模具外面抽芯的共有4个大滑块,分别是滑块1、2、4、7。由于所需抽芯距较大,4个滑块均使用了液压缸驱动。前模一侧共有两个斜弹式滑块,分别是滑块10和12,这两个滑块的驱动力主要靠产品本身的拉力和弹簧11的弹力,行程限位主要靠限位块9。除此之外,在后模型芯6内部还有6个小型内滑块机构8。此例最大的设计难点在这6个内滑块上。按照常规的设计思路,此类内滑块必须使用弹B板机构,但本例并未如此设计,而是使用了一种特殊的浮动式锁紧块5来实现6个小型内滑块的抽芯和复位。锁紧块5的浮动动力一是来自弹簧3,二是来自滑块4。由于受产品形状限制,滑块4必须穿过型芯6来成型手柄端面的形状,同时也穿过锁紧块5,这种结构虽然难度很大,但锁紧块5刚好利用滑块4的运动动力完成对6个内滑块的抽芯和复位。当滑块4开始抽芯时,在T形槽的作用下又带动锁紧块5向后运动,锁紧块5又带动6个内滑块向内抽芯;当锁紧块向下运动L距离时,6个内滑块均已完成了抽芯,滑块4也停止了运动;当滑块4开始复位时,它又在自身斜面的作用下推动锁紧块5向前复位,锁紧块又推动6个内滑块完成复位。这种巧妙的构思,灵活的设计思路,避免了使用弹B板结构,使模具的整体结构得到了大大简化,动作更加安全可靠。
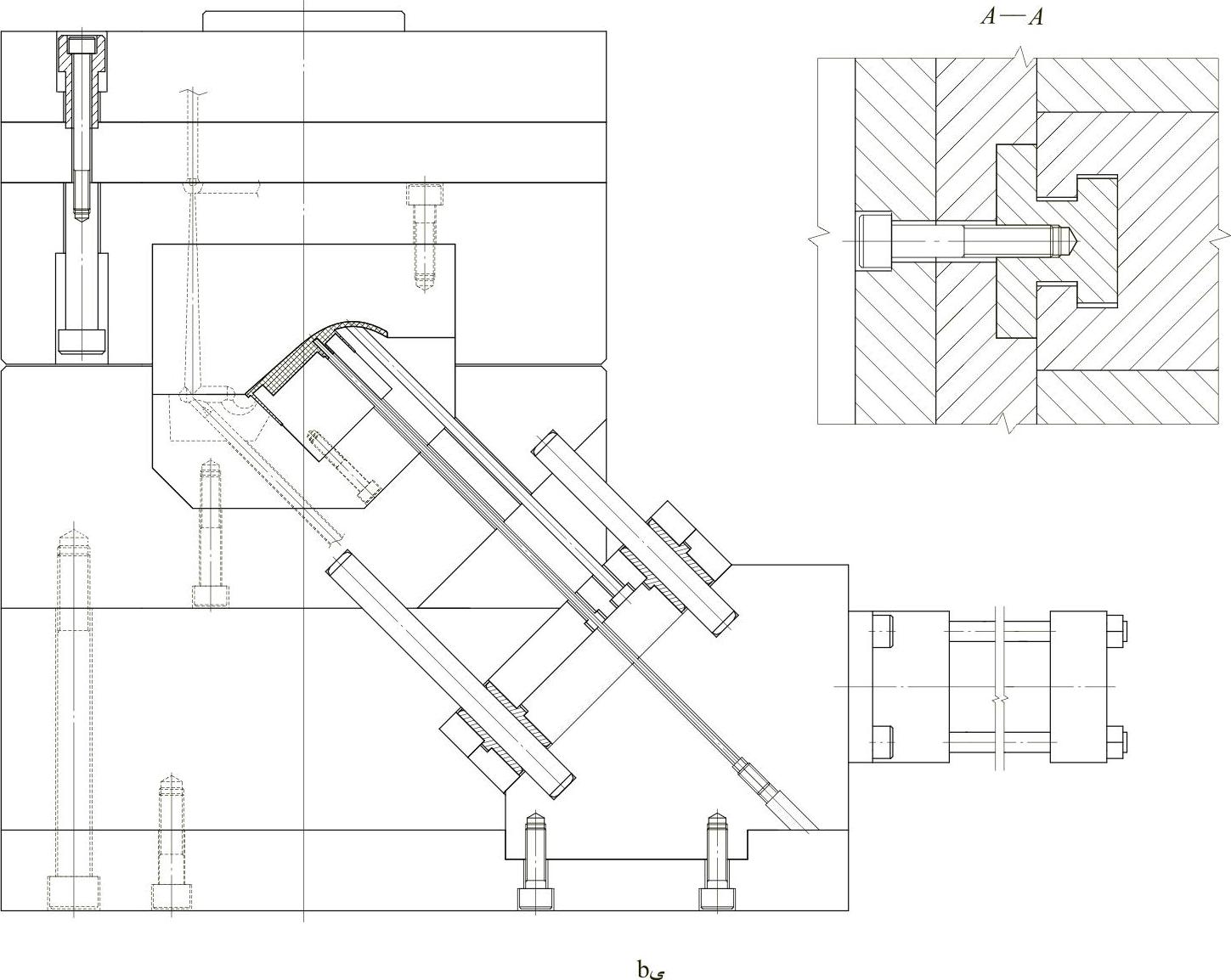
图 8-14(续)
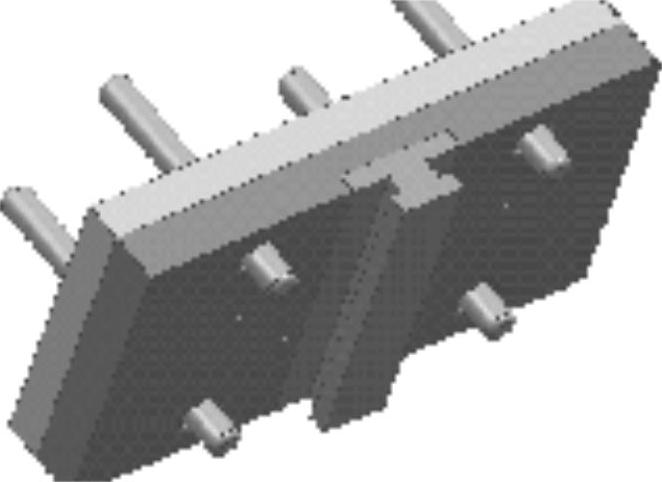
图 8-15
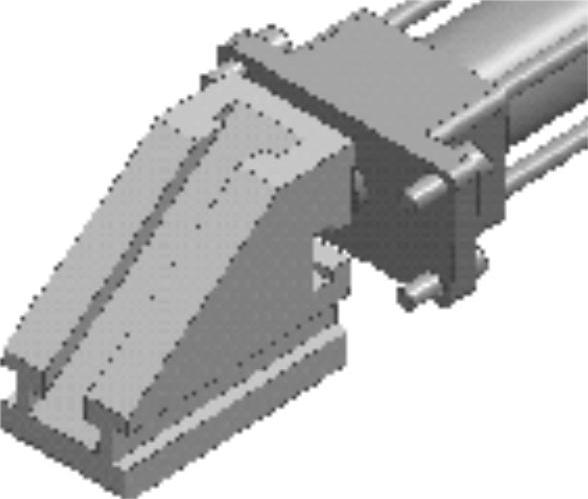
图 8-16
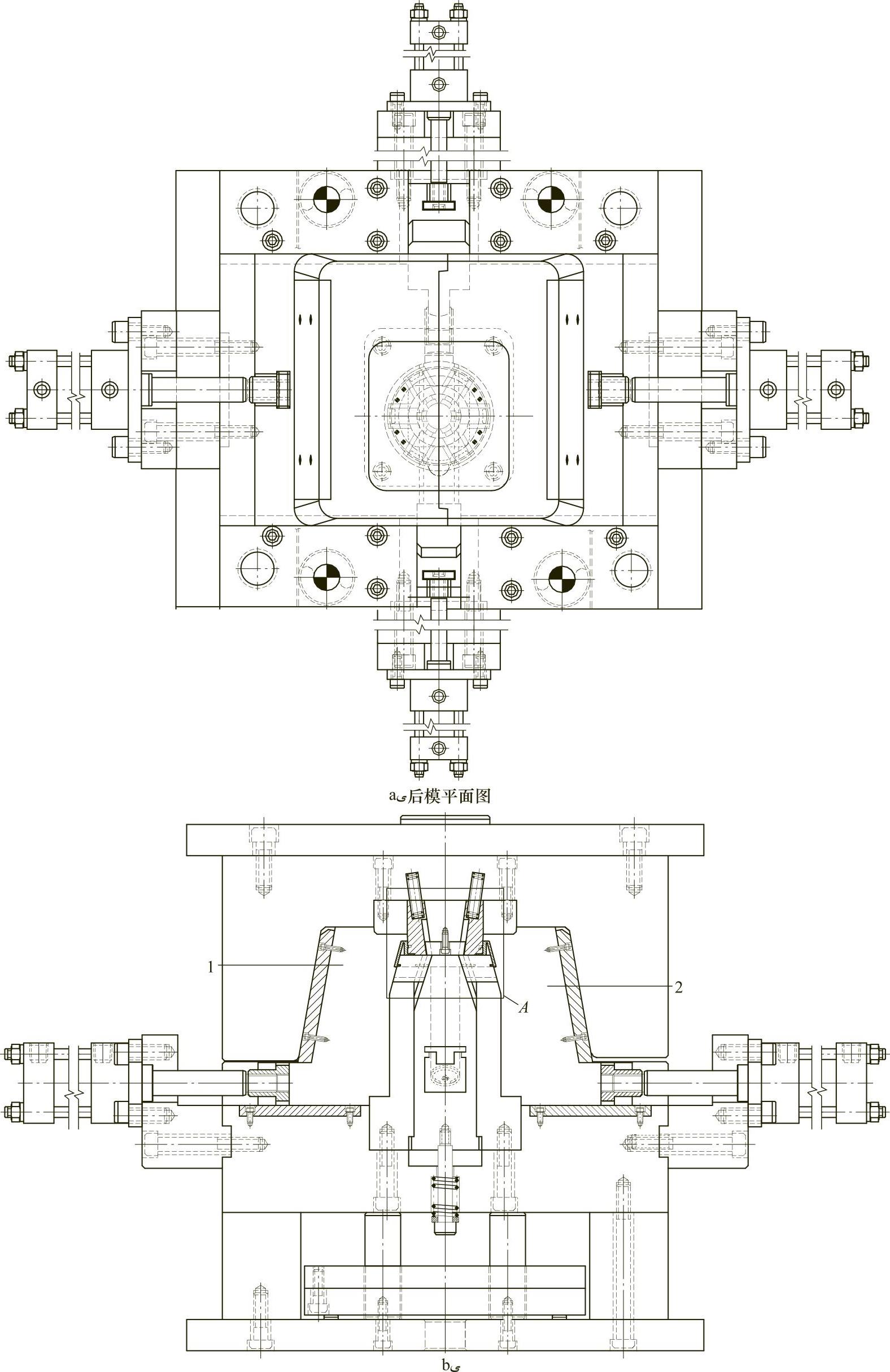
图 8-17
1、2—滑块(https://www.xing528.com)
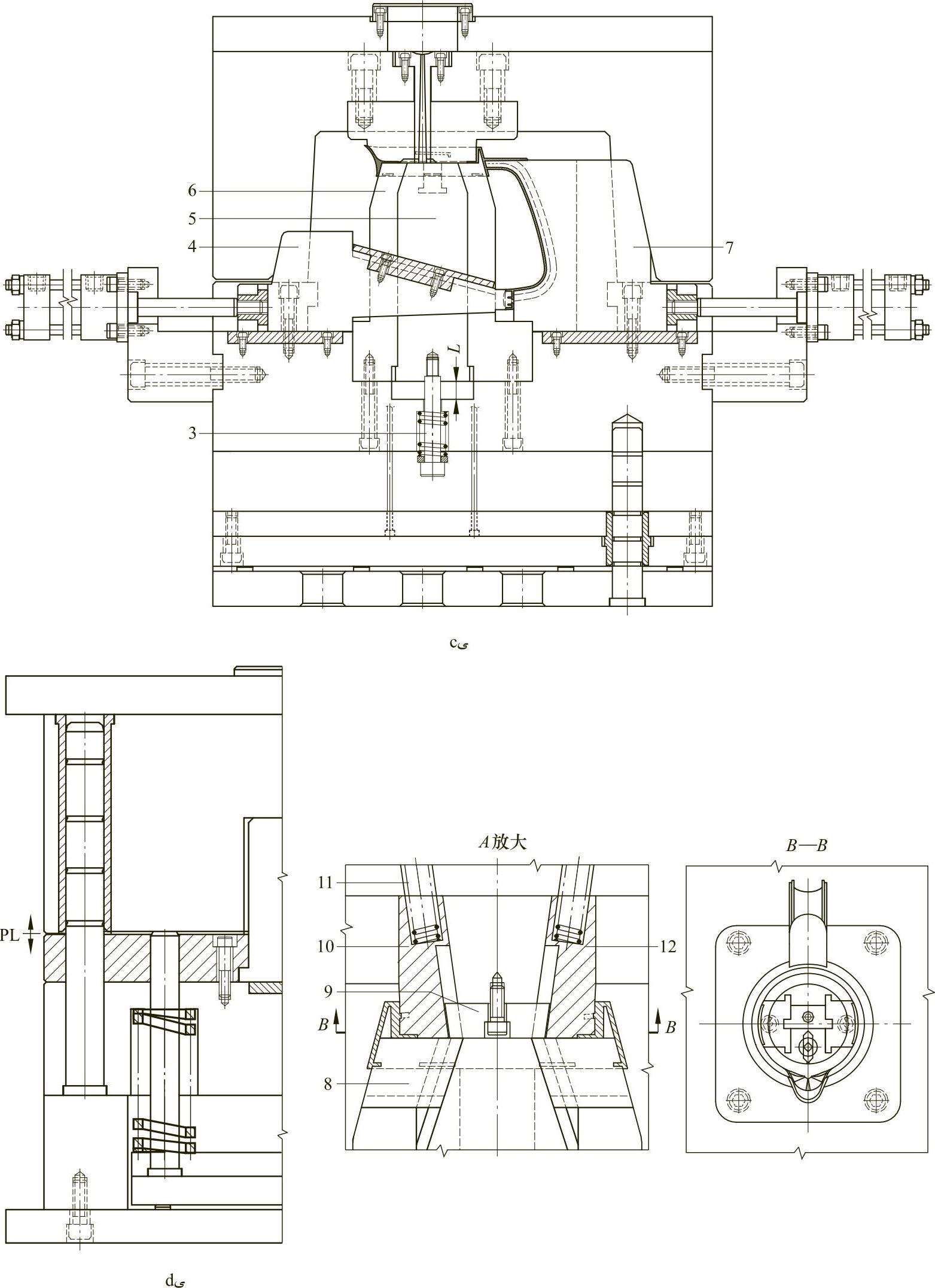
图 8-17(续)
3、11—弹簧 4、7、10、12—滑块 5—锁紧块 6—后模型芯 8—内滑块机构 9—限位块
图8-18为后模型芯6的三维零件图,图8-19为锁紧块5的三维零件视图。此二图可帮助读者加深对内滑块机构的进一步理解。至于此例的其他滑块机构,虽然均较复杂,但均属于普通结构,限于篇幅,本例不再一一讲述。
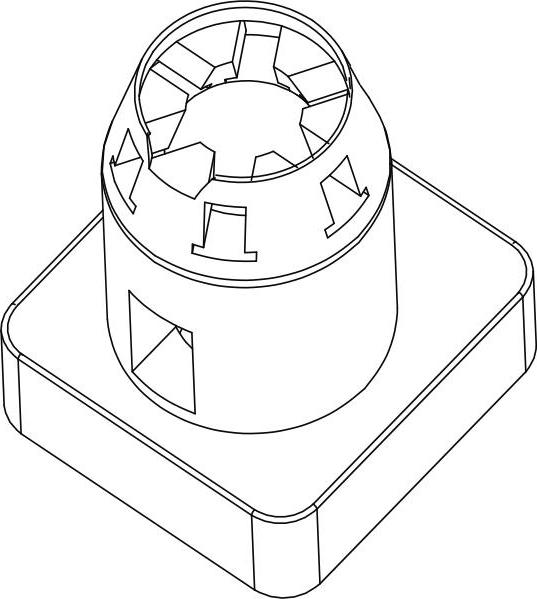
图 8-18
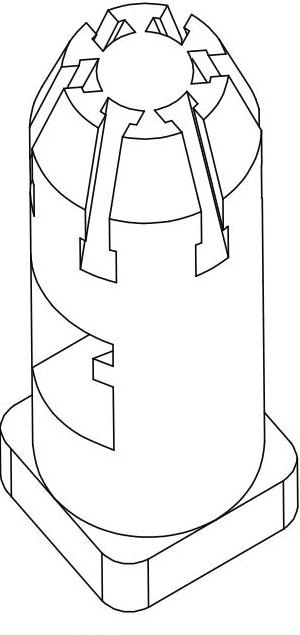
图 8-19
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。