



在Tandem GMAW的自动焊接系统中,送丝机是决定焊接过程稳定性和焊缝质量的重要组成部分之一。对其工作特性提出了与焊接电源一样严格的要求。目前大多数适用于Tandem GMAW的送丝机都是数字控制的,其控制模块通常集成于焊接电源的控制系统中。同时作为一种联网设备与焊接电源、焊接机器人或刚性自动化设备通过网线进行通信联络,以实现送丝速度和特性的精确控制。这类高性能的数字控制送丝机的典型代表有德国CLOOS公司的CK78DR/O Tandem和CK118R/K型送丝机和奥地利Fronius公司的VR 1500-30型和VR 7000-30型送丝机。其外形分别如图2-61和图2-62所示。
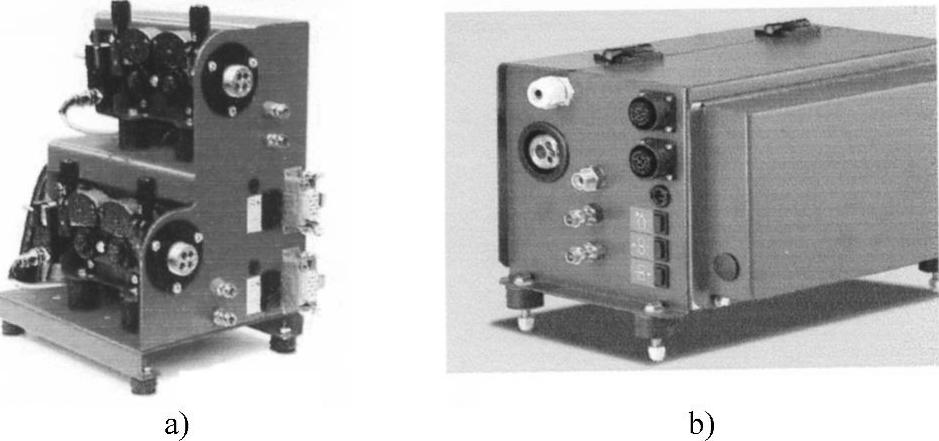
图2-61 CLOOS CK78DR/O Tandem和CK118R/K型送丝机外形
a)CK78DR/OTandem型 b)CK118R/K型

图2-62 VR 1500-30型和VR 7000-30型送丝机外形
a)VR 1500-30型 b)VR 7000-30型
这些送丝机的驱动机构结构示于图2-63。通常采用两对送丝轮双驱动,并加测速反馈控制,保证在相当高的送丝速度下送丝稳定可靠。其技术特性数据列于表2-19。
由表载数据可见,VR 1500-30型和CK118R/K型送丝机因其外形尺寸较小,较适用于与焊接机器人配套,组合成机器人工作站。
送丝机与焊接电源、焊枪、供气系统、供水系统以及控制器的连接方式,以VR 1500-30型送丝机为例示于图2-64。
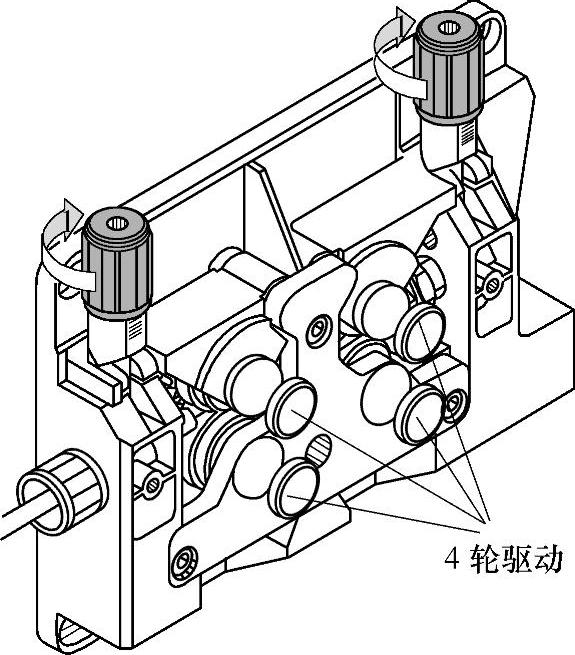
图2-63 VR 7000-30型驱动机构结构(https://www.xing528.com)
表2-19 TandemGMAW送丝机技术特性数据

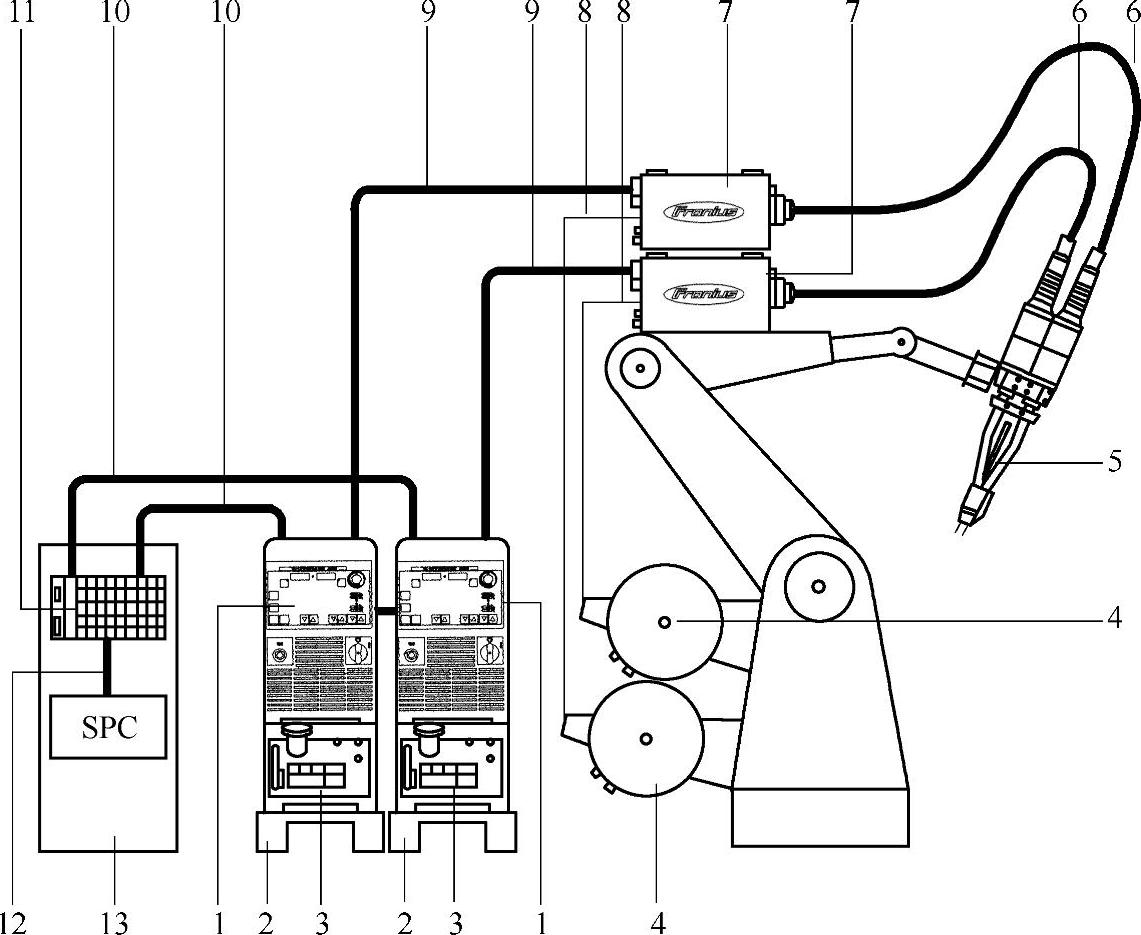
图2-64 送丝机与焊接电源焊枪、供气系统、供水系统以及控制器的连接方式
1—焊接电源 2—底座 3—冷却水箱 4—焊丝盘及支架 5—焊枪 6—软管包 7—VR1500-30型送丝机 8—送丝软管 9—标准控制电缆线 10—遥控电缆线(局域网) 11—标准I/O接口 12—机器人控制箱连接电缆 13—机器人控制箱
VR7000-30型送丝机前后面板和两侧板上接口的设置见图2-65a~d。从图2-65中可进一步了解这种送丝机的功能。
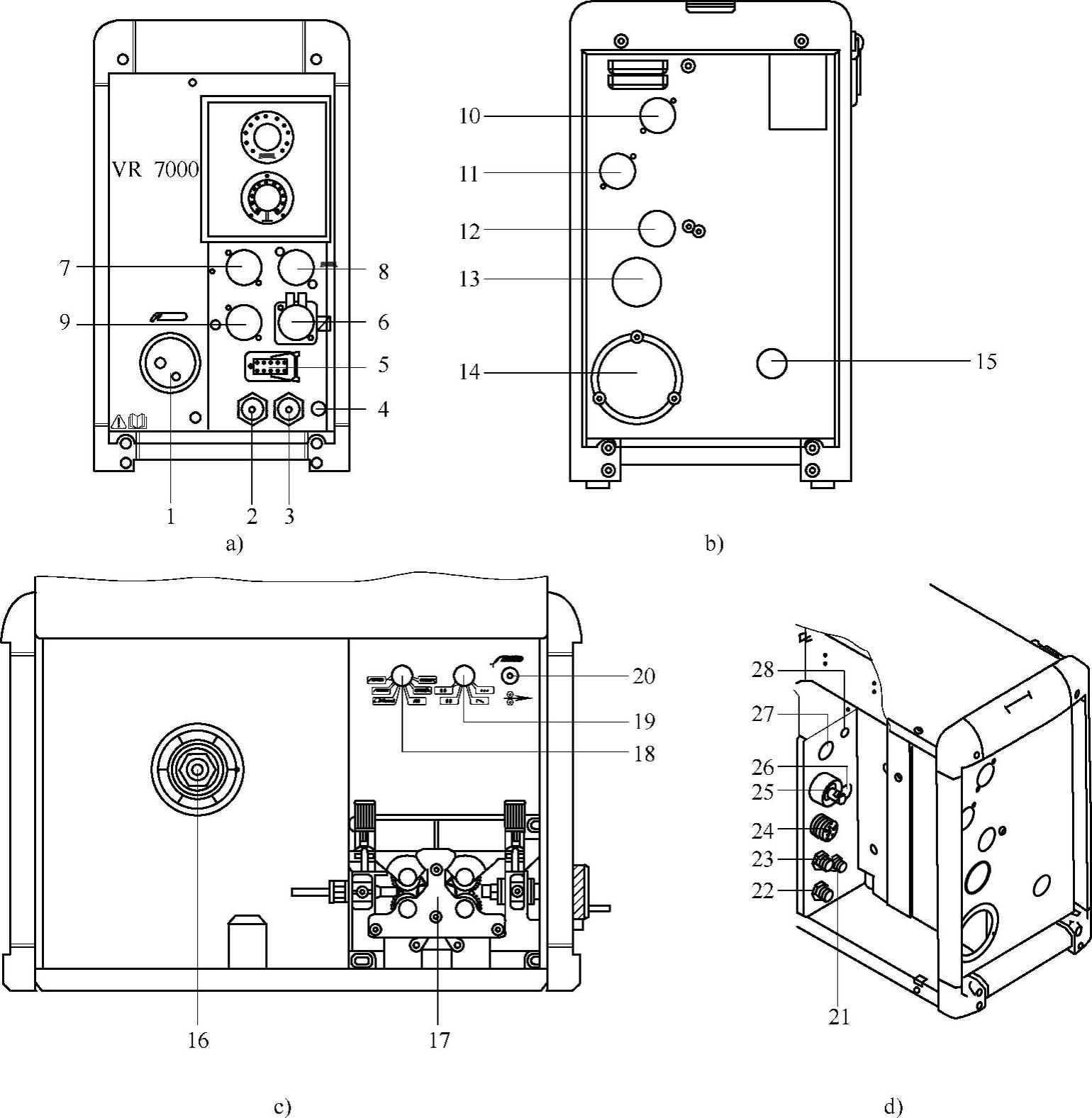
图2-65 VR 7000-30型送丝机前后面板和两侧板接口的设置
a)前面板 b)后面板 c)左侧板 d)右侧板
1—焊枪接头 2、23—回水接头 3—进水接头 4、7~12、26~28—备用插孔 5—焊枪控制线插座 6—局域网线插座 13—软管套筒(接压缩空气) 14—软管包套筒(接焊枪) 15—外伸焊丝软管套筒 16—焊丝盘制动支架 17—4轮驱动机构 18—焊接方法选择开关 19—操作模式选择开关 20—点动送丝/检气按钮 21—保护气软管接头 22—焊枪软管包进水接头 24—局域网接口 25—焊枪软管电缆快速接头
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。