



目前,在国际上成功用于Tandem GMAW自动焊接装置的焊接电源系推荐CLOOS公司的Quinto GLC 603型焊接电源和Fronius公司的Time Twin Digital 5000,7000,9000系列焊接电源。本节主要介绍这两种焊接电源的特点和技术特性。1.QuintoGLC603型焊接电源
(1)主要特点 Quin to GLC 603型焊接电源是一种全数字控制大功率多功能脉冲GMAW电源,性能优异,采用3个微控制器和1个数字信号处理器精确控制所有焊接参数,可任意选择恒压(V/I)或恒流(I/I)控制模式,自适应控制电弧长度,可分别设置和修正脉冲波形参数并具有脉冲同步功能,十分适用于Tandem GMAW法。电源控制界面图形化,直观友好。是当代最先进的脉冲GMAW电源之一。图2-40示出Quinto GLC 603型焊接电源的外形。
Quinto GLC 603型焊接电源的特点之一是,主回路采用了斩波器电路,其结构框图如图2-41所示。三相交流电通过工频变压器降压,低压交流电整流后形成低压直流电,经由大功率开关器件组成的斩波器,斩波后输出焊接所需的脉冲电流。

图2-40 Quinto GLC 603型焊接电源外形
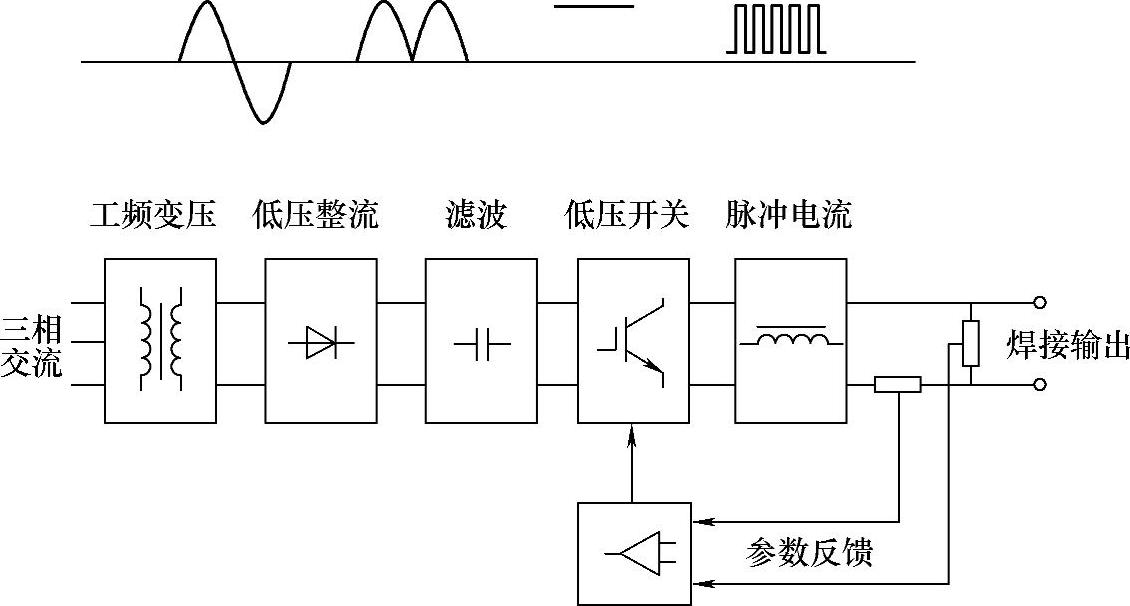
图2-41 斩波器结构框图
这种斩波器型焊接电源的优点在于,大功率开关元件的工作电压较低,约为50V。在这种工作条件下,开关器件的可靠性很高,损坏几率很低,因此斩波器型焊接电源工作可靠性完全符合高效GMAW的要求。其次,斩波器的开关频率可达100kHz,对于频率为30~400Hz的焊接脉冲电流,其响应速度是相当高的。又因控制系统通过PWM(脉宽调制器)直接调节焊接回路的电压和焊接电流等参数,大大提高了焊接参数的控制精度。
斩波器型焊接电源的缺点是工频变压器体积和重量较大,生产成本较高。
(2)控制模块及自动化接口 为满足自动化焊接复杂的控制要求,Quinto GLC 603型焊接电源的控制系统由若干控制模块组成。主要包括电源控制模块、送丝机控制模块、操作界面模块、循环冷却水箱控制模块和输入/输出接口等。每个模块都有各自的分处理器,并由中央处理器统一分级管理。电路的数据传输采用局域网(CAN)总线进行。中央处理器是32位CPU芯片,各功能模块采用DSP芯片作为分处理器进行管理。中央控制器与送丝机、循环冷却水箱、开关电源等模块之间的通信,采用专用的控制电缆或光纤。各种接口在电源前后盖板上的设置如图2-42所示。

图2-42 Qninto GLC 603焊接电源前后盖板上接口的设置
接口ST2是用于工业控制和通信的72芯DIN标准硬件接口。其中包含了用于控制的RS232和RS485通信接口、16位JOB数据调用线、焊接电流、电弧电压模拟信号和启动、停止等开关信号接口。
SS接口是一个专用的24芯接口,与电脑连接或与群控系统连接的和数据线接口,包括TCP/IP Ethernet(以太网)协议的VBC接口。
ST3是用于主、副焊接电源之间协同通信的接口。
NS是用于BBM分离型操作界面通信的接口。
除了硬件接口之外,Quinto GLC 603焊接电源的控制系统还提供了软件接口,可在人机界面的通信选单中找到,并按所提供的选项进行设定和修改。
CLOOS公司的Tandem GMAW系统还为用户提供了全球范围的互联网服务。可以通过Internet网络管理焊接系统,可以进行集群监控,数据采集、质量管理等服务工作。也可对焊接设备的软件升级改造。
上述硬件接口的功能除了通信之外,还包含了对外设置进行控制的功能,硬件接口中的某些线位,可以通过软件设定为控制开关,可用于编程,启动和停止外部设备,如焊接小车,焊接变位机和弧光防护装置的开启和关闭等。
(3)软件控制 鉴于Tandem GMAW需设定的参数较多,控制程序较复杂,现代Tandem GMAW都通过软件界面来实现。CLOOS Quinto 603型Tandem系统软件控制选单分以下三级。
1)第1级主选单功能列表如图2-43所示。其中给出了系统可供选择的全部操作功能模块名称。其功能名称和功能简述如下:
①磁盘功能。调出、存储系统的各类数据,包括焊接参数、实时监控数据、系统升级数据、运行状态数据和系统设定数据等。可以选用软、硬磁盘或外部存储器作为存储介质。
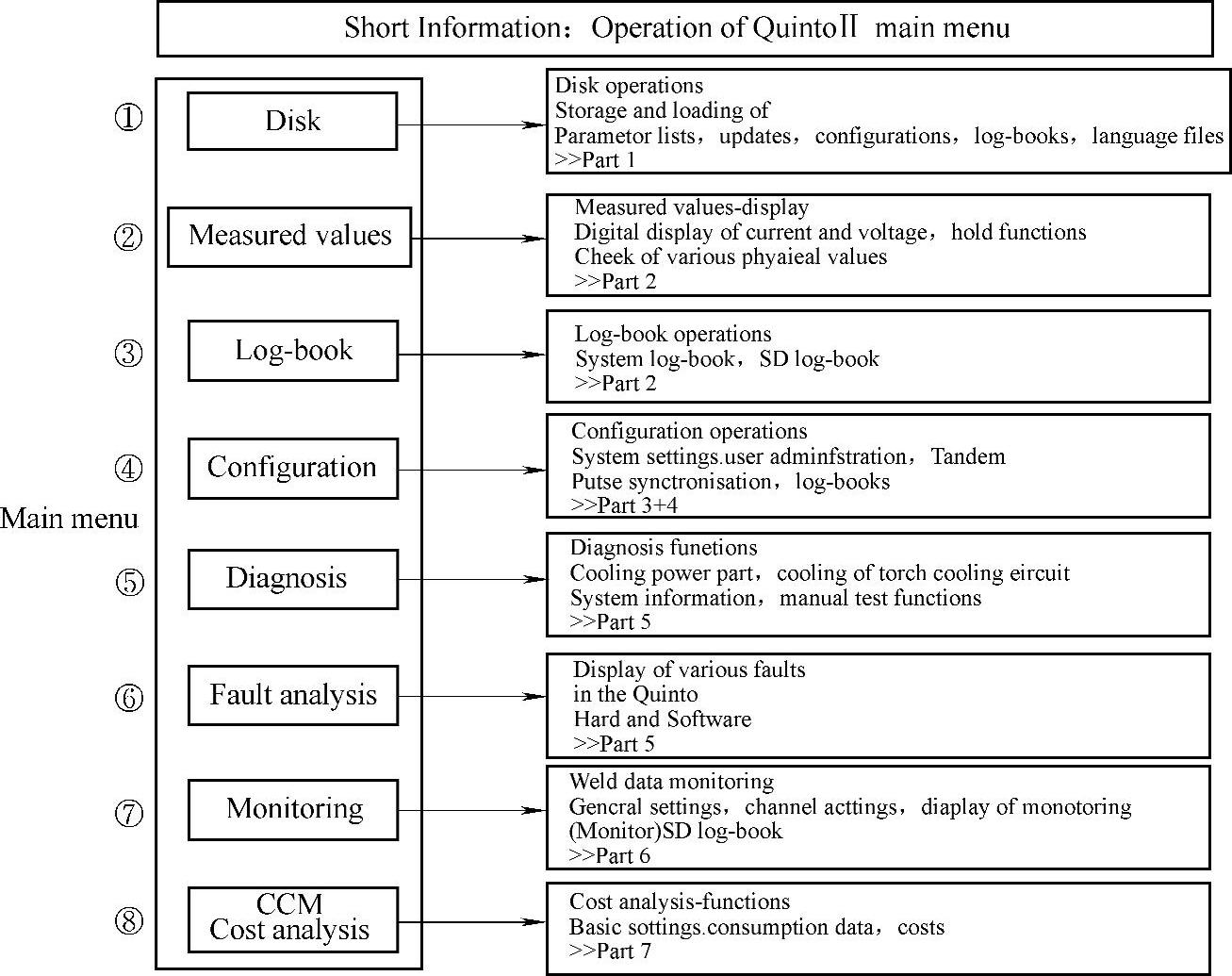
图2-43 系统第1级选单的功能列表及功能模块名称
1—磁盘功能 2—数据测量 3—系统日志 4—系统设定 5—自动功能 6—故障处理 7—参数监视 8—成本核算
②数据测量。用于选择系统在各种工作状态下的参数测量模式和显示模式。可以选择界面显示图形或数值,实时数值或存储数值的显示,也可选择不同的测量方式和不同的单位、制式等。还可将存储数值与实时测量结果对比。
③系统日 。系统工作状态的记录,以日期为单位记录系统的工作实况。可以选择记录的形式、种类和部位。可以记录各传感器的检测数据、焊接参数的变动和功能设定的修改等。
。系统工作状态的记录,以日期为单位记录系统的工作实况。可以选择记录的形式、种类和部位。可以记录各传感器的检测数据、焊接参数的变动和功能设定的修改等。
④系统设定。这是控制系统中最主要的模块。在系统设定界面,可以选择显示模式和界面形式,可以选择系统使用的语言(英语、德语、法语),可以设定开机密码或使用者等级密码。此外,还可设定Tandem GMAW系统的工作模式。例如独立工作模式或上位控制器配合模式。设定主、副电源的关系,设定与外部设备的通信方式、信道和协议等。
⑤自检功能。用以设定系统工作时自身功能的判别标准。并设定系统各硬件模块工作状态的检测,例如气体流量、冷却水流量、工作温度、焊枪温度、控制接口通信状况、焊接参数一元化及双电源间的通信状况等,以及焊接电源每一次开机、关机时自检的设定。
⑥故障处理。对系统内发生的各种故障处理方式进行设定。将系统实时检测到的状态与系统出厂设定的状态进行对比。不符合的状态即为故障。但在实际工作状态下,人为的设定可能造成与出厂设置不同的状态,但并非故障。在本设定中可以规定故障的等级。根据故障严重的程度可分为忽略等级、显示警告等级和停机处理等级。
⑦参数监视。根据系统的工作模式,选择需在显示屏上监视的工作参数,例如焊接参数、引弧参数、通道存储参数和一元化参数等。
⑧成本核算。系统中的计算机可以进行生产成本计算。根据实际的焊接生产数据,如焊接材料的种类和价格、气体种类和价格、操作人员工资、电费和水费等,可以按工作时间和材料消耗量等数据,算出当天的生产成本。
2)第2级选单的功能。点击主选单中各选项即可进入第2级选单。图2-44为第2级选单的界面功能。
在第2级选单中,系统给出该功能模块的次级目录,这些目录是该模块功能的进一步细化,例如磁盘操作模块的2级目录中列出了表格的存储,调出等选项。这些2级目录有的已被选定,有的还有下一级目录。
点击第2级选单中的选项,即可进入第3级选单目录。其界面相对比较简单,大部分为选择项,分为直接选定或间接选定,例如有的项目由“ON”,“OFF”,“YES”“NO”等选项供勾选。绝大多数功能选项在前3级选单中均可选定,但有少数的功能需进入第4级选单,基本上都是开/关选项。
(4)专家数据库 脉冲GMAW焊接电源需设置和调节的参数较多,如脉冲峰值、脉冲基值、脉冲频率、脉冲占空比、脉冲形状、送丝速度和电弧电压等。这些参数的任何一项,如设定不恰当,就会影响电弧和熔滴过渡的稳定性。为简化焊接参数的设置,Quinto 603型Tandem焊接电源的控制系统内装入了专家数据库,即根据已积累的焊接生产经验,将各种材料,不同规格和接头形式的最佳焊接参数以数据库的形式存入。在需要时,可将其调出重复使用。
应强调指出,Quinto 603型Tandem焊接电源中,焊接数据的编辑系统是对用户开放的。除了出厂时已装入常用焊接材料的专家系统外,用户还可根据自己使用的特殊材料和特殊工艺,建立自己的焊接专家系统,即用户可以在已有的焊接参数一元化设置的条件下,选定被焊材料种类、焊丝种类、规格,保护气种类等,系统会根据给定的条件,自动选择合适的焊接参数。此外,还允许用户根据自身的条件,编制新的专用焊接程序。可以采用两种方式生成专用的专家系统。一种称为点式,即针对一种焊缝,对焊接过程分步进行条件设定、材料设定、初始段参数设定、工作段参数设定和收弧段参数设定等。这些参数中包含了控制模式、母材和焊接材料牌号、保护气体种类、脉冲电流参数和程序分段等。焊接程序编成后,可将其存储到程序通道中,并由用户给定通道号和名称。可以随即使用这一新编的程序,也可在需要时调出使用,并可转存、修改和复制。
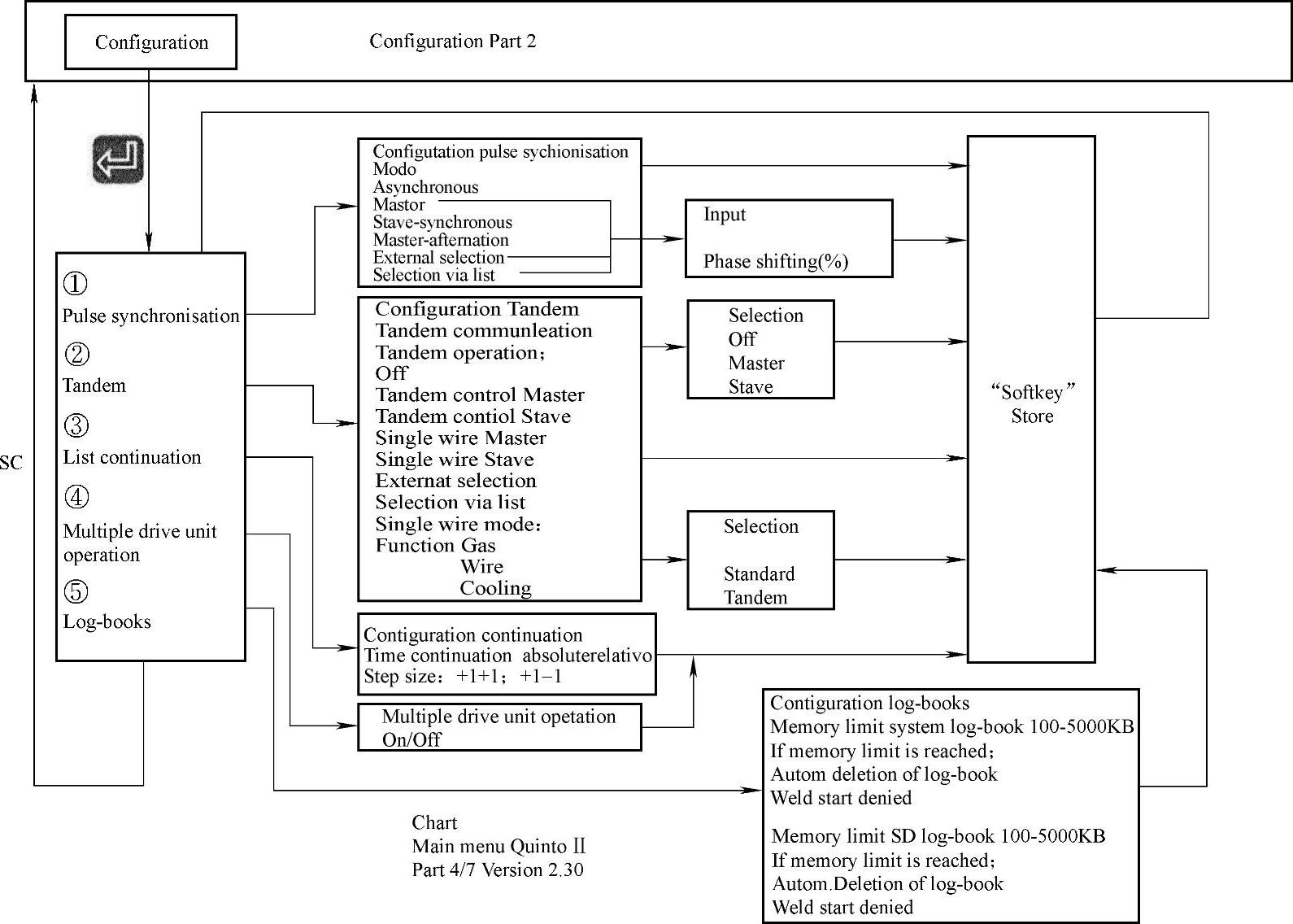
图2-44 第2级选单的界面功能
1—脉冲同步 2—双丝串列 3—列表顺序 4—多台驱动系统操作 5—系统日誌
另一种专家系统生成方式为线式。即通过专用的软件,在选定的数据存储区内,设定3点到5点,系统计算机即能按默认的算法生成一条参数曲线。用户自编的专家系统曲线将以专有名称存储,并不影响原有的专家系统。
焊接参数专家系统的编辑是在控制界面上完成的。可以在主机的界面上完成主机和副机的数据编辑,也可分别在主机和副机界面上各自编辑本机的参数曲线。数据的输入和设定使用人机界面和功能键联合完成。窗口显示屏可随时调整和查看数据的编辑过程。也可通过RS232接口与个人计算机连接,在PC机界面上编辑或存储专家系统。
(5)编程和操作
1)人机界面。图2-45示出Quinto GLC 603型焊接电源的操作界面。焊接参数的设定和所有操作都是在人机界面上完成的。人机界面配备了一块230mm(9in)的显示屏、多个功能键和数字键,以及编码器等。
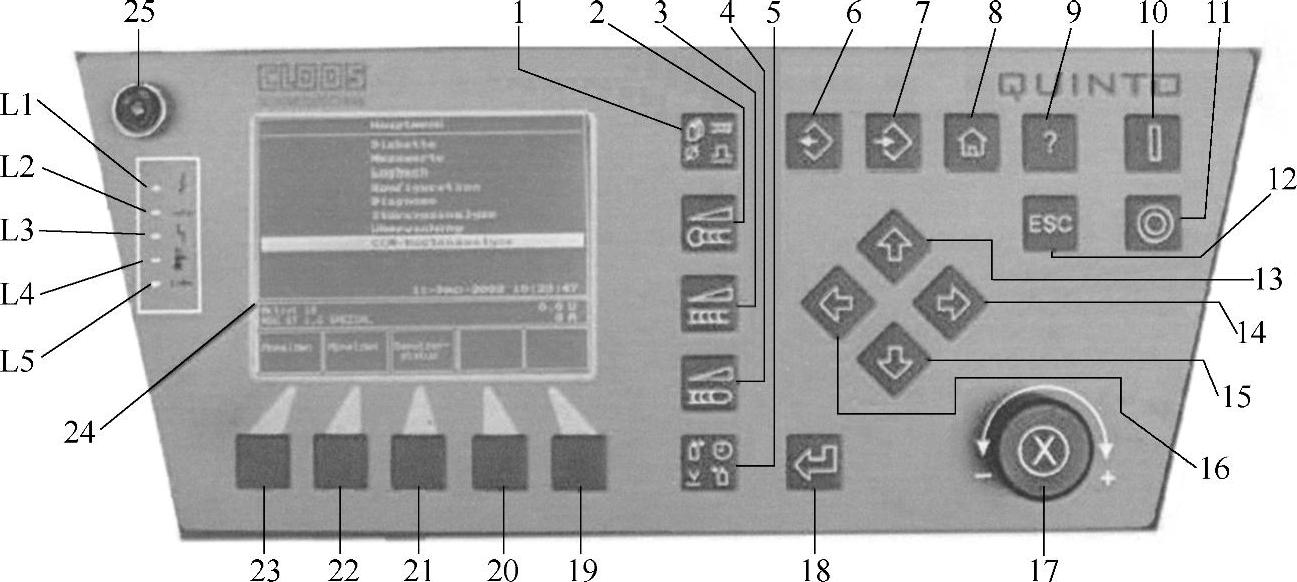
图2-45 Quinto GLC 603型焊接电源的操作界面
以下按图2-45所标的件号,将各按键、开关和指示灯的功能简要说明如下:
1—基本参数选择键,2—引弧参数选择键,3—焊接参数选择键,4—收弧参数选择键,5—次级参数选择键,6—存储参数调出键,7—存储参数存入键,8—主画面返回键,9—帮助键,10、11—系统开关键,12—退出键,13~16—四个方向光标移动键,17—主调节旋钮(编码器),起以下3种功能:a.调节参数值,b.调节光标上下移动,c.按下档回车键。18—回车键,21~23—功能键,19、20—为用户预留,24—显示屏,25—密码锁。
L1~L5为状态指示灯。
L1—电源开关指示灯,L2—焊接指示灯,L3—一般错误指示灯(不停机),L4—过热指示灯(停机),L5—SD版本,系统监控错误(停机)。
焊接工作开始前,操作工需先打开焊接电源背面的硬开关,L1点亮后,即可用人机界面设定参数和进行焊接操作。
2)焊接程序的编制。1份完整的焊接程序可按以下步骤编制:
①按下基本参数选择键,显示图2-46所示的基本参数选单。
第1行选择脉冲GMAW焊接方法,U/I恒压控制模式。
第2行选择开关操控模式(2步、4步、高级4步、程控4步、电弧点焊和外部启动)。
第3行选择焊丝直径(0.8~2.4mm)。
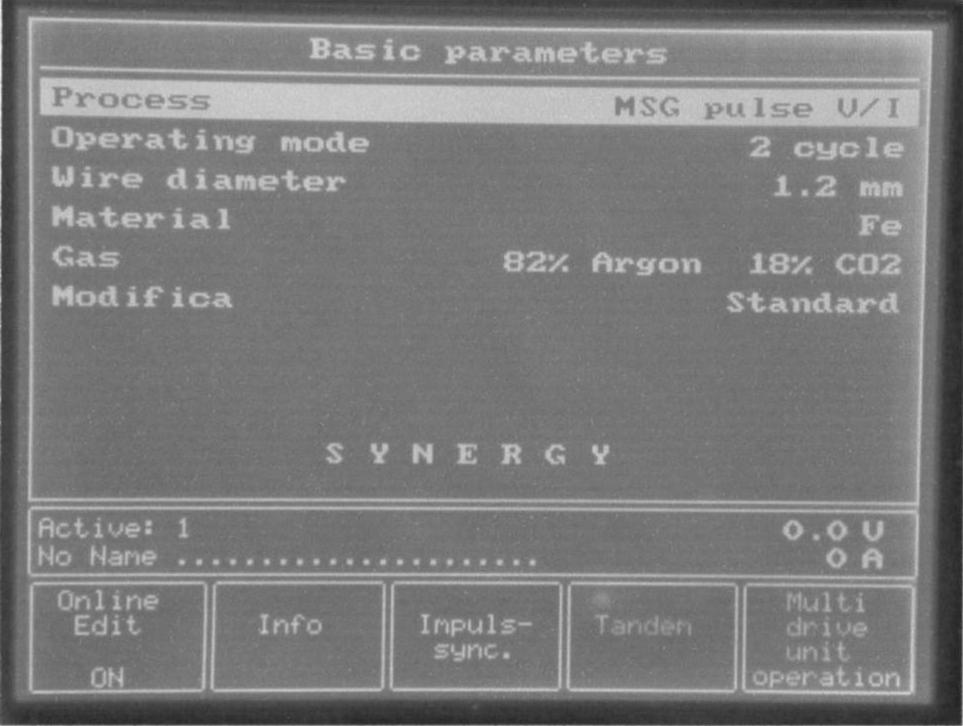
图2-46 基本参数选单
第4行选择焊接材料种类(钢、不锈钢和铝合金等)。
第5行选择保护气体[氩(Ar)、二氧化碳(CO2)、多种不同配比的混合气体]。
第6行允许对上列选项进行修正:
基本参数设定完后,下一步开始设定焊接引弧段参数。
②设定引弧阶段参数。引弧参数界面如图2-47所示。
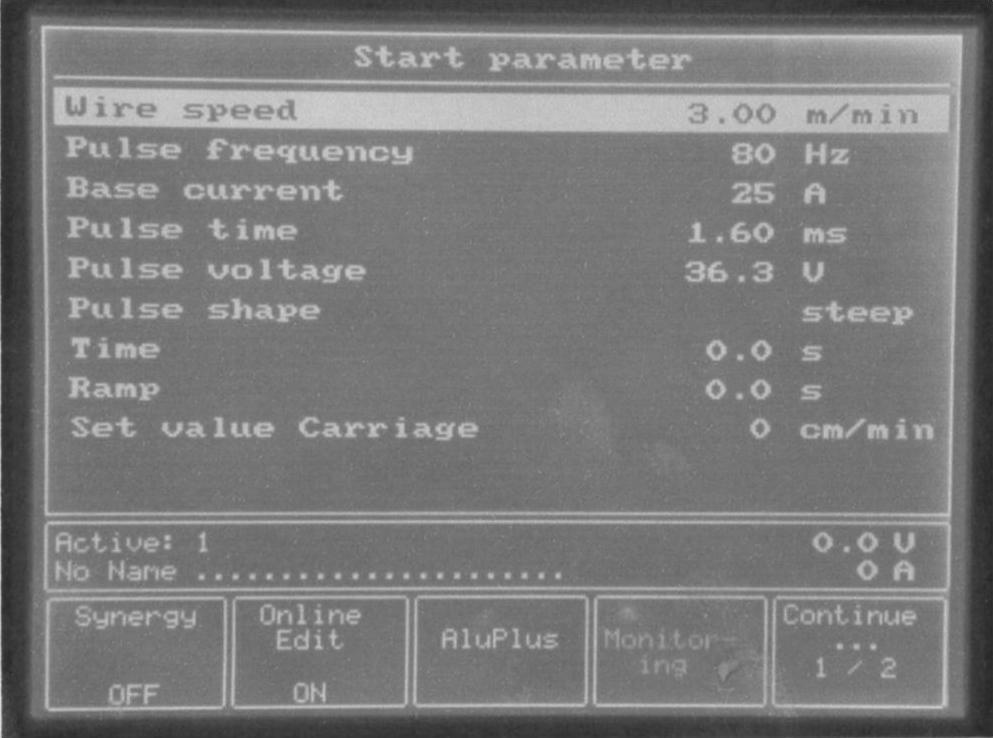
图2-47 引弧参数界面
第1行设定引弧送丝速度(0.5~40m/min)。
第2行设定脉冲频率(20~400Hz)。
第3行设定基值电流(5~400A)。
第4行设定脉冲宽度(0.5~5ms)。
第5行设定脉冲峰值电压(15~70V)。
第6行设定脉冲波形(极陡、陡、缓、极缓和特殊等6种)。
第7行设定引弧时间(0~99s)。
第8行设定递增时间(0~99s,指由引弧参数提升到焊接参数的时间)。
第9行设定外部行走机构启动时间和速度。
③主焊接参数的设定。主焊接参数界面示于图2-48。引弧参数设定完后,即开始主焊接参数的设定。
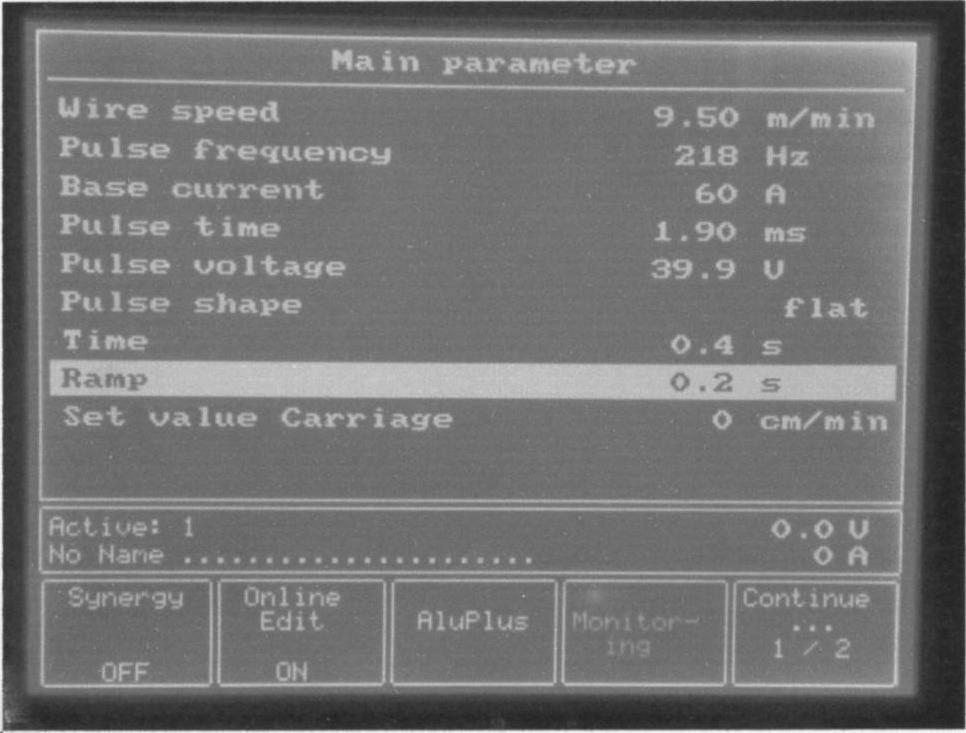
图2-48 主焊接参数界面
第1行设定焊接送丝速度(0.5~40m/min)。
第2行设定脉冲频率(20~400Hz)。
第3行设定基值电流(5~400A)。
第4行设定脉冲宽度(0.5~5ms)。
第5行设定脉冲峰值电压(15~70V)。
第6行设定脉冲波形(极陡、陡、缓、极缓和特殊等6种)。
第7行设定分段焊接时间(0~99s)。
第8行设定递增/衰减时间(0~99s,指由某一分段参数转到下一分段参数递增/衰减的时间)。
第9行设定外部行走机构的速度。
主焊接参数设定完后,下一步开始设定焊接收弧阶段参数。
④收弧阶段参数的设定。收弧参数界面如图2-49所示。
第1行设定收弧送丝速度(0.5~40m/min)。
第2行设定脉冲频率(20~400Hz)。
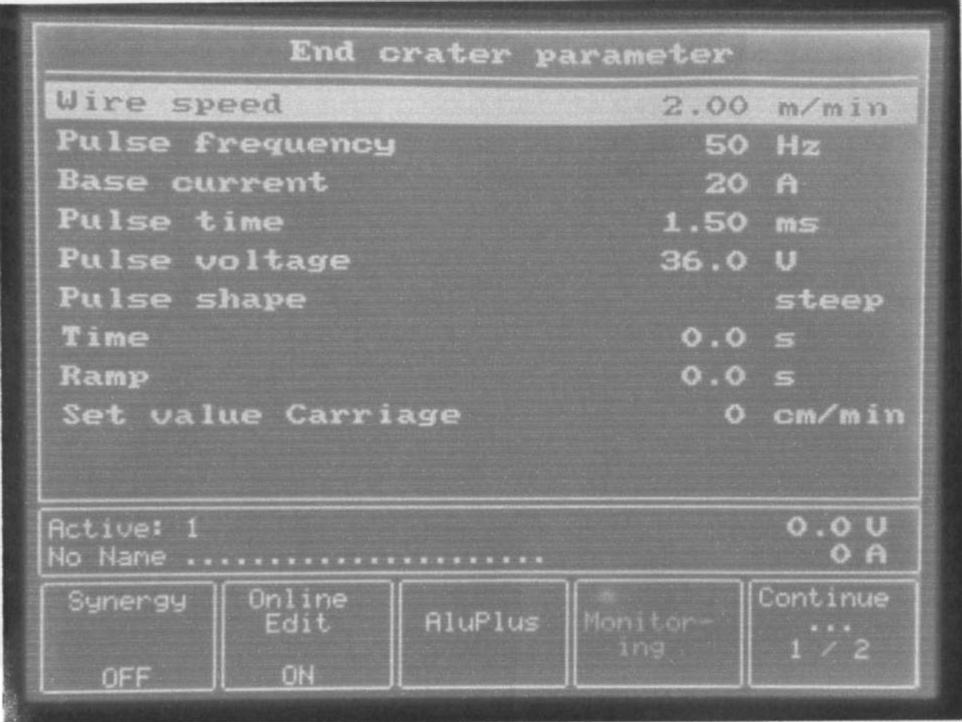
图2-49 收弧参数界面
第3行设定基值电流(5~400A)。
第4行设定脉冲宽度(0.5~5ms)。
第5行设定脉冲峰值电压(15~70V)。
第6行设定脉冲波形(极陡、陡、缓、极缓和特殊等6种)。
第7行设定收弧时间(0~99s)。
第8行设定衰减时间(0~99s,指由焊接参数转到收弧参数的衰减时间)。
第9行设定外部行走机构停车时间和速度。
⑤次级参数的设定。在Tandem GMAW系统中,除了上列基本参数外,还需设定如预送气等次级参数。这些参数的选单如图2-50所示。
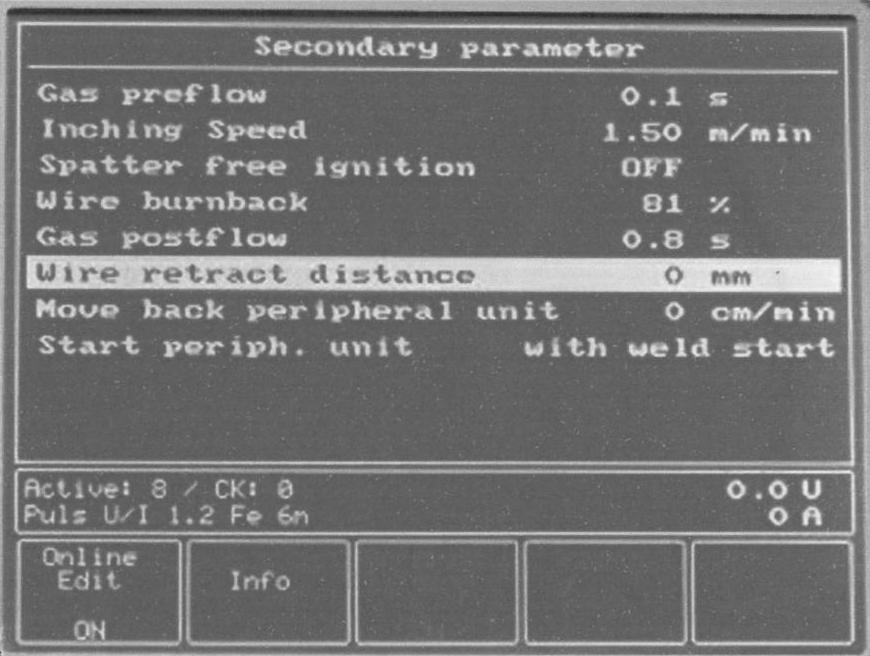
图2-50 次级参数界面
第1行设定预送气时间(0~99s)。
第2行设定焊丝未接触焊件前的送丝速度(空程送丝速度,0.5~40m/min)。
第3行开/关无飞溅引弧(软引弧)。
第4行设定焊丝返烧长度(0~100%)。
第5行设定延迟断气时间(0~99s)。
第6行设定焊丝回抽长度。
第7行设定引弧段时间(0~99s)。
此外还可设定外部行走机构复位的时间等。
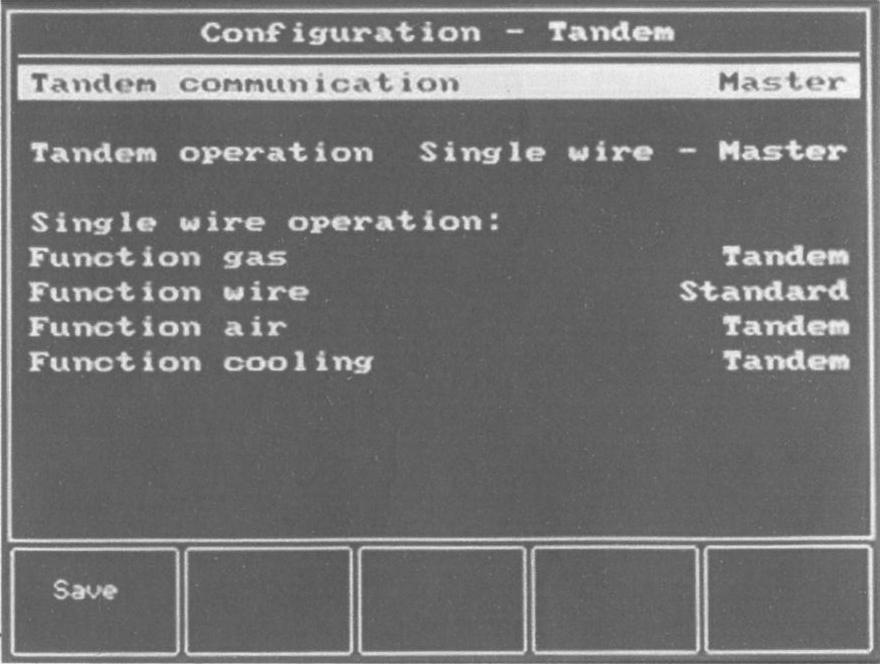
(6)双丝协调控制的设定 鉴于Quinto GLC 603焊接电源是一台多功能的电源,当用于不同的工艺方法时,需对工作模式进行设定。首先在主选单自诊断模块下,进入2级选单对系统进行设定,规定系统工作于Tandem状态或其他状态,并开通两台电源间的通信以及系统对上位机的通信。确认Tandem状态后,还需对Tandem的各项功能进行开通和设定。
Tandem系统配置选单为2级选单,可以在主选单的配置项目(Configration)找到Tandem选项。通过转动操作界面上的旋钮17(均见图2-45)或上下箭头键,可以选择相应的项目。并按下旋钮17或回车键加以确认。其设定界面如图2-51所示。此界面用来设定Tandem系统的通信状态,可选择为主机或副机或单机使用。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-51 Tandem工作状态设定界面
在Tandem设定中还可规定由主机或由副机对系统的某些功能进行管理,例如检气、检丝、外部设备启动,命令执行和焊缝跟踪信号定位等。
Tandem GMAW焊接电源与非相同品牌的焊接机器人或焊接工艺装备组成自动化焊接装置时,还需使用数字化的输入/输出接口模块(I/OM),这种模块可以处理16位数字信号和8路模拟信号,并可通过编程进行设定,规定72条线的功能以及处理信号的种类。
(7)工作参数的实时修正 Tandem GMAW设备处于工作状态时,允许用户对其工作参数进行修正。图2-51示出Tandem GMAW焊接时的主参数界面,显示出焊接电源正在输出的焊接参数值。这些值可能是专家系统给定的,也可能是用户编程设定的。此时,通过转动操作界面上的旋钮17或上下箭头键,可将光标移动到要选择的项目,并按下旋钮17或回车键18(均见图2-45)加以确认。随即可使用旋钮17或上下箭头键调整该参数值。如认为合适,则再次按下旋钮17或回车键18写入存储区。在参数值存入的同时,焊接电源的输出值即变为修正后的数值。
应当指出,即时修正的参数值仅对本次焊接过程有效,而不会被存储到原有程序中。即当下一次再使用这一焊接程序时,即时修正的参数值并不会以给定值出现。如用户认为修正后的参数更为合适,想在以后的焊接中继续使用,则可在修正后关闭焊接电源之前将其存储。可以选择原存储通道或新建另一个存储通道。
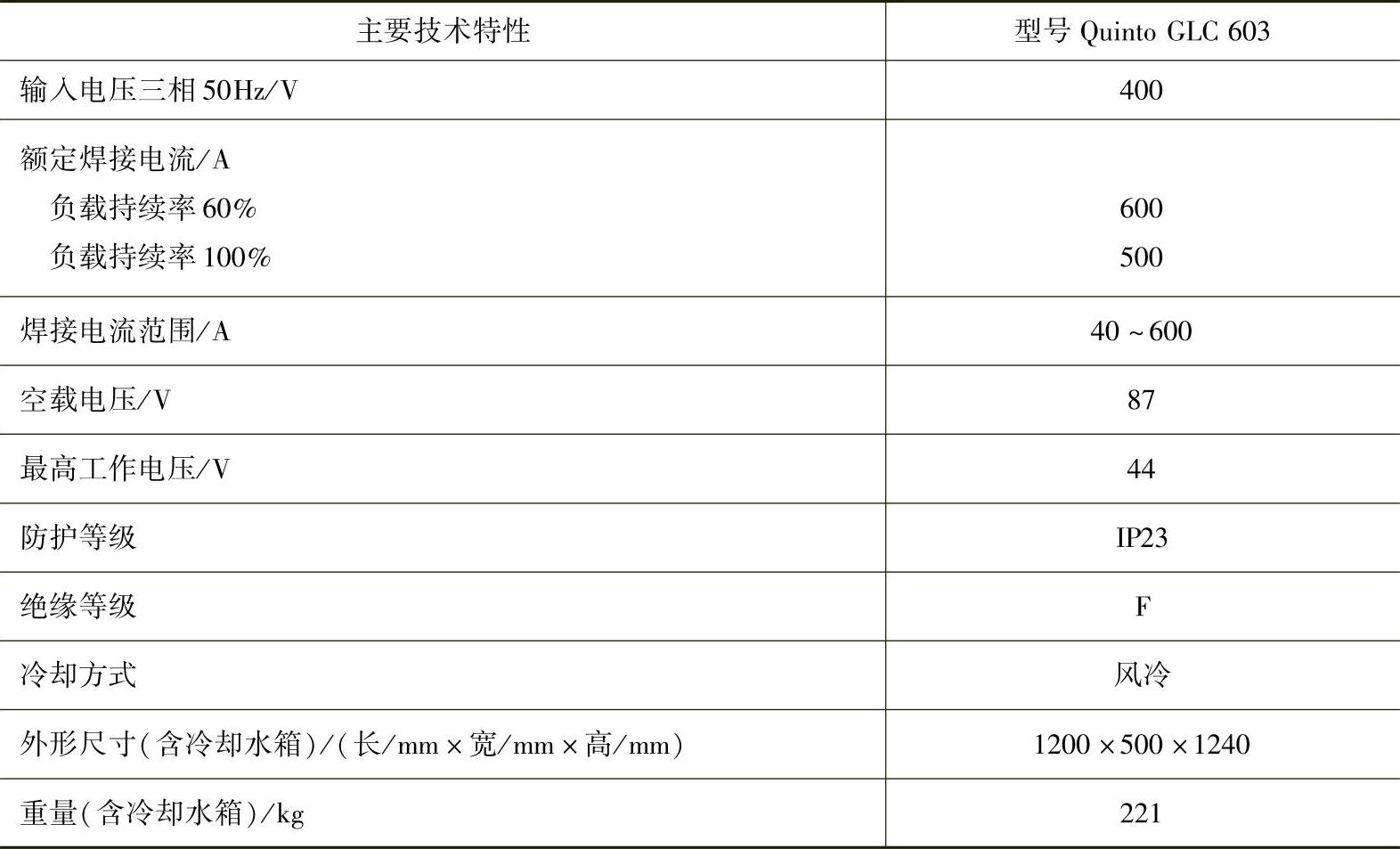
(8)技术特性数据 Quinto GLC 603型脉冲焊接电源的技术特性数据列于表2-13。
表2-13 QuintoGLC603型脉冲焊接电源的技术特性数据
2.TimeTwinDigital5000、7200、9000系列的焊接电源
(1)主要特点 Time Twin Digital 5000、7200、9000系列焊接电源是Froumis公司生产的全数字控制优化脉冲多功能焊接电源。其特点是采用当代数据处理速度极高的数字信号处理器(DSP)和系统集成能力很强的高位数微处理机,并结合计算机软件控制技术,使这种新型GMAW焊接电源具有前所未有的优异特性。图2-52示出Time Twin Digital 5000型全数字控制GMAW电源的外形,其标准配置如图2-53所示。
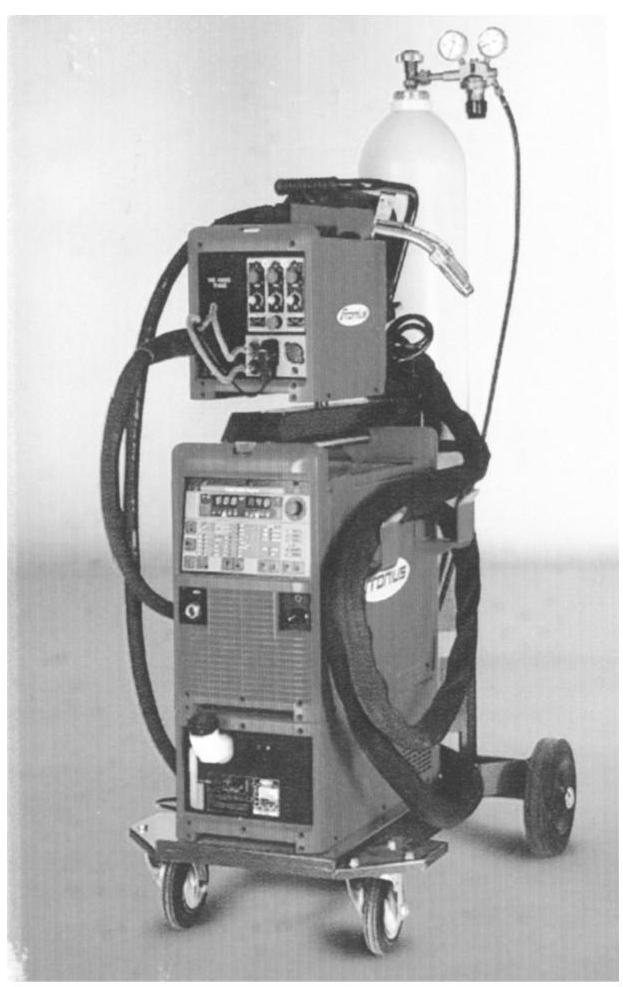
图2-52 Time Twin Digital 5000型全数字控制GMAW电源外形
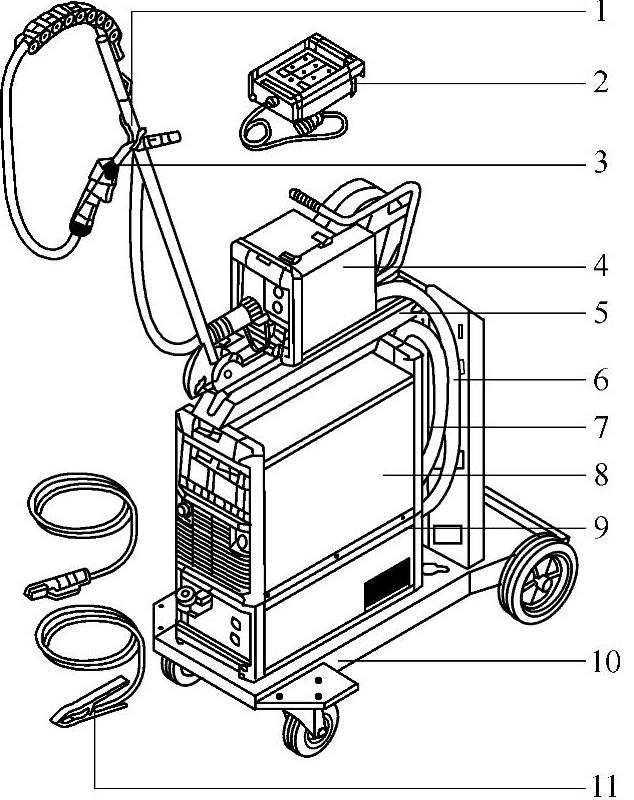
图2-53 Time Twin Digital 5000、7200、9000系列焊接电源标准配置
1—软管悬臂 2—遥控盒 3—焊枪 4—送丝机 5—送丝机底座 6—连接电缆 7—机器人接口 8—焊接电源 9—冷却水箱 10—手推车及气瓶固定支架 11—地线及焊接电缆
Time Twin Digital系列焊接电源是一种逆变式整流弧焊电源,其工作原理框图如图2-54所示。其中主电源为典型的晶体管一次开关电源,控制系统则由数字信号处理器、微处理器、实时检测电路和闭环反馈系统组成。焊接电源的输出特性则由计算机软件,即指令系统加以控制。
(2)控制面板与接口 Time Twin Digital 5000、7200、9000系列全数字控制焊接电源的控制面板完全相同,采用Time 5000 Digital控制面板,其外形和功能键的设置示于图2-55,其中各按键、旋钮、显示屏和指示灯的功能说明如下。
1)数码调节旋钮。用于调节各焊接参数值。当所选定的参数指示灯发亮时,转动此调节旋钮,可改变该参数值。
2)参数选择按钮。用于选择下列参数:“a”角焊缝厚度、钢板厚度、焊接电流“A”、送丝速度、F1指示灯和送丝电动机输入电流指示灯。如参数选择按钮上的指示灯和调节旋钮上的指示灯同时点亮,则转动调节旋钮,可改变所指示的/选定的参数值。
3)参数选择按钮。用于选择下列参数:电弧长度、熔滴脱落力/电弧吹力(动态)、电弧电压“V”和焊接速度(cm/min),如参数选择按钮上的指示灯和调节旋钮上的指示灯同时点亮,则转动调节旋钮,可改变所指示的/选定的参数值。
4)焊接方法选择按钮。用于选择下列焊接工艺方法:优化脉冲GMAW焊接法、参数优化GMAW焊接法、常规GMAW焊接法、作业程序模式、接触引弧GTAW焊接法和焊条电弧焊。Tandem GMAW时可选择优化脉冲GMAW焊接法。
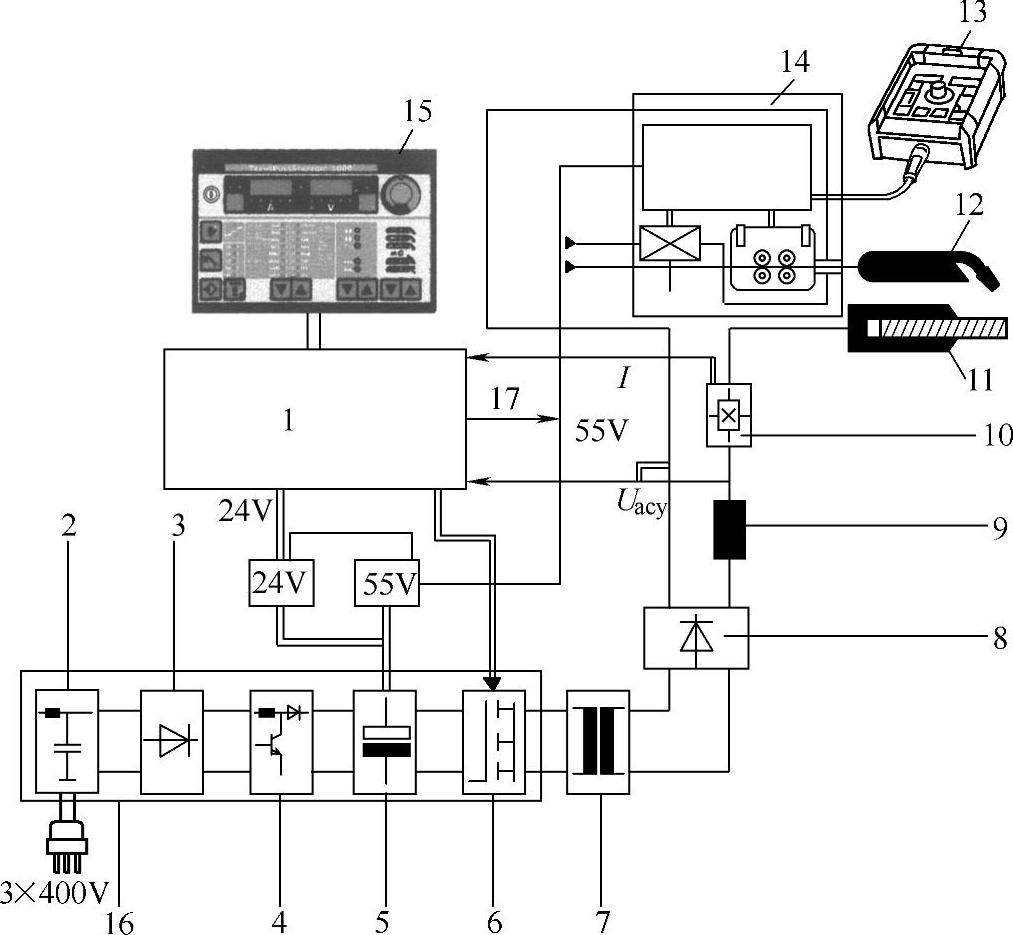
图2-54 新一代全数字控制逆变式整流弧焊电源的工作原理框图
1—控制线路板 2—网路滤波器 3—一次整流器 4—功率因数控制器 5—中间回路电容器 6—晶体管开关 7—焊接变压器 8—二次整流 9—扼流圈 10—焊接电流传感器 11—焊件 12—焊枪 13—遥控盒 14—送丝机 15—控制面板 16—一次电源模块 17—局域网
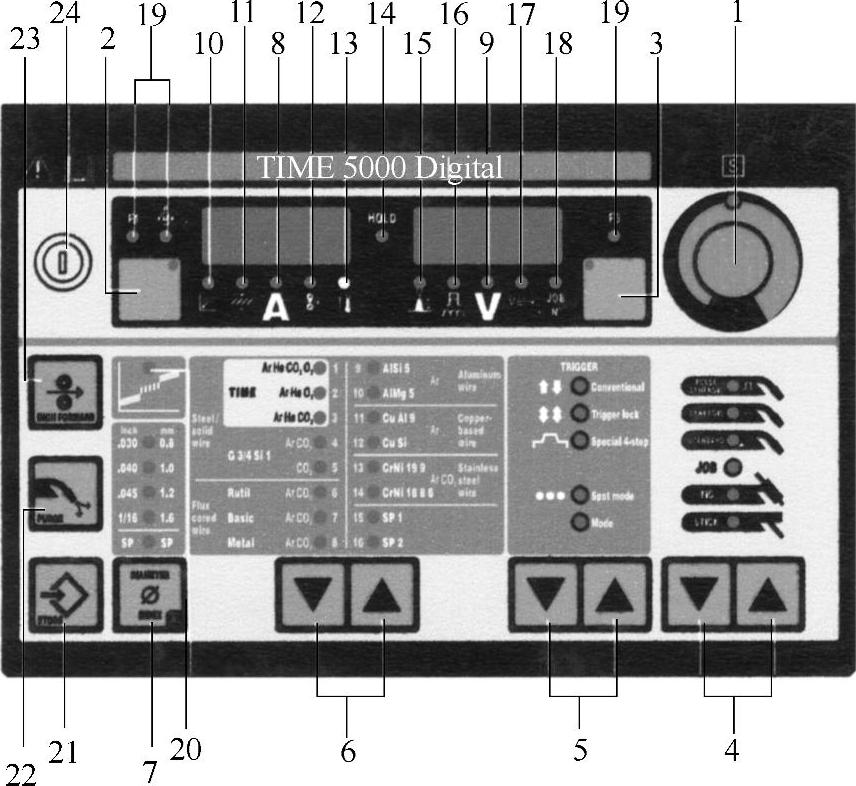
图2-55 Time 5000 Digital控制面板的外形和设置
1—数码调节旋钮 2、3—参数选择按钮 4—焊接方法选择按钮 5—操作模式选择按钮 6—填充材料选择按键 7—焊丝直径选择键 8—焊接电流指示灯 9—焊接电压指示灯 10—“a”角焊缝厚度指示灯 11—板厚指示灯 12—送丝速度指示灯 13—过热指示灯 14—“HOLD”指示灯 15—电弧长度修正指示灯 16—熔滴脱落力 17—焊接速度指示灯 18—作业编号指示灯 19—F1/送丝电动机输入电流/F3指示灯 20—中间状态电弧指示灯 21—存储按键(“Store”) 22—“检气”按键 23—“点动”送丝按键 24——键锁开关
5)操作模式选择按键。用于选择下列操作模式:2步、4步、特种4步和点焊操作模式。
6)填充材料选择按键。用于选择待使用的填充材料和保护气体种类,参数SP1和SP2用于选择补加的材料品种。
7)焊丝直径选择键。用于选择待使用的焊丝直径。参数SP用于选择补加的焊丝直径。
8)焊接电流指示灯。用于选择焊接电流。焊接开始前,电源自动显示根据优化程序设定的推荐值。焊接时,显示实际值。
9)焊接电压指示灯。用于选择电弧电压。焊接开始前,电源自动显示根据优化程序设定的推荐值,焊接时,显示实际值。
10)“a”角焊缝厚度指示灯。用于选择角焊缝的厚度“a”。送丝速度和焊接电流/电压是按规定的焊接速度计算的,故在选择角焊缝厚度“a”之前,必须预先设定焊接速度。
11)板厚指示灯。用于选择待焊钢板厚度(mm),该参数设定后,其他所有焊接参数自动调整。
12)送丝速度指示灯。用于选择送丝速度(m/min),决定于送丝速度的其他参数相应自动调整。
13)过热指示灯。如电源产生过热,此指示灯点亮(例如由于负载持续率超过额定值)。
14)“HOLD”指示灯。每次焊接操作完成后,焊接电流和电弧电压实际值将被存储,则“HOLD”指示灯点亮。
15)电弧长度修正指示灯。用于电弧长度修正。如“-”为缩短电弧长度;“O”为电弧长度不变,“+”为加大电弧长度。
16)熔滴脱落力,用于电弧吹力修正指示灯。熔滴脱落力,电弧吹力修正的作用取决于所采用的焊接工艺方法。参数优化GMAW时,其作用影响熔滴过渡瞬间短路电流的动特性。“-”为电弧更稳定,更挺直,“O”为电弧力不变,“+”为电弧较柔软,飞溅少。优化脉冲GMAW时,连续修正熔滴脱落力。“-”为降低熔滴脱落力,“O”为熔滴脱落力不变,“+”为增加熔滴脱落力。
17)焊接速度指示灯。用于选择焊接速度。送丝速度和焊接电流及电弧电压是作为尺寸参数“a”的函数计算的。
18)作业编号指示灯。用于检索以前用“Store”(存储)按键存储的焊接参数和作业(JOB)编号。
19)F1/送丝电动机输入电流/F3指示灯。用于显示已定义的参数。
20)中间状态电弧指示灯。介于浸入过渡电弧和喷射过渡电弧之间的电弧。它促使飞溅产生。当中间状态电弧指示灯亮时,则提醒焊工已进入临界区,应立即调整参数。
21)“Store”(存储)按键。用于进入设置选单,或在作业程序模式下用于存储所设定的参数。如同时按下存储按键21和填充材料选择按键6,则显示屏出现软件版本编号。如再按一次按键6,则显示屏上出现焊接数据库版本编号(例如,01029=M0029)。如再按一次(第2次)按键6,则在显示屏上出现送丝机编号以及送丝机软件版本编号(例如,A151023)。如第3次按按键6,则显示工作时间,即自电源启动后记录的实际燃弧时间。例如,“654132.1”=65.432h/6min。再按存储键21,则退出选单。
22)“检气”按键。通过减压器调整所需的气体流量。按此按键,气体流出约30s。再按此按键,停止检气。如同时按下存储键21和检气键22,显示屏出现所设定的预送气时间(如Gpr|0.1s)。此时,转动调整旋钮1,可以改变预送气的时间。如再按焊接方法选择键4,则显示所设定的延迟断气时间(如GpO|0.5s)。再转动调节旋钮1可改变延迟断气时间。再按存储键21,则退出该程序。
23)“点动送丝”按键。用于在不送气和不通电的状态下,将焊丝送入焊枪软管。为获知各种点动送丝序列的信息,可按住“点动送丝”按键,即出现设置选单,在其余选单“过程参数”中可以找到参数“Fdi”。如同时按下“存储”键21和“点动送丝”键23,显示屏则出现所设定的点动送丝速度(如Fdi|10m/min),此时,转动调节旋钮1,可改变点动送丝速度。再按“存储键”21,则退出该程序。
24)键锁开关(可选项)。当键锁处于水平位置,下列功能不起作用:①用“焊接方法选择键”4选择焊接方法;②用“操作模式键”5选择操作模式;③用“填充材料键”6选择填充材料;④用“存储键”21进入设置选单;⑤进入作业程序修正选单。
从上述控制面板功能可知,除了直接在控制面板上设定和调整焊接参数,还可通过选单对焊接参数和焊接程序进行控制(详见下节)。
Time 5000 Digital焊接电源前后盖板上接口的布置示于图2-56。其中(B)、(C)、(F)为焊接电流输出端子,采用卡口式锁紧插座(快速接头插座),(G)为主电源开关,(I)为主电源电缆线松紧装置,(J)为备用插孔,准备用于局域网或高速总线插座,(M)为局域网插座,(N)为备用插孔,准备用于局域网高速总线插座。
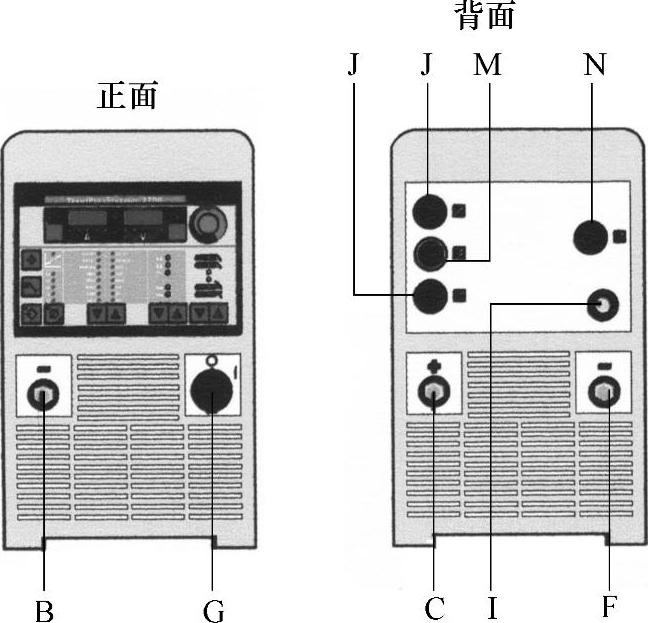
图2-56 Time 5000 Digital焊接电源前后盖板上接口的布置
两台Time 5000 Digital焊接电源组合成Tandem GMAW焊接系统通过局域网或现场总线的连接方法如图2-57所示。
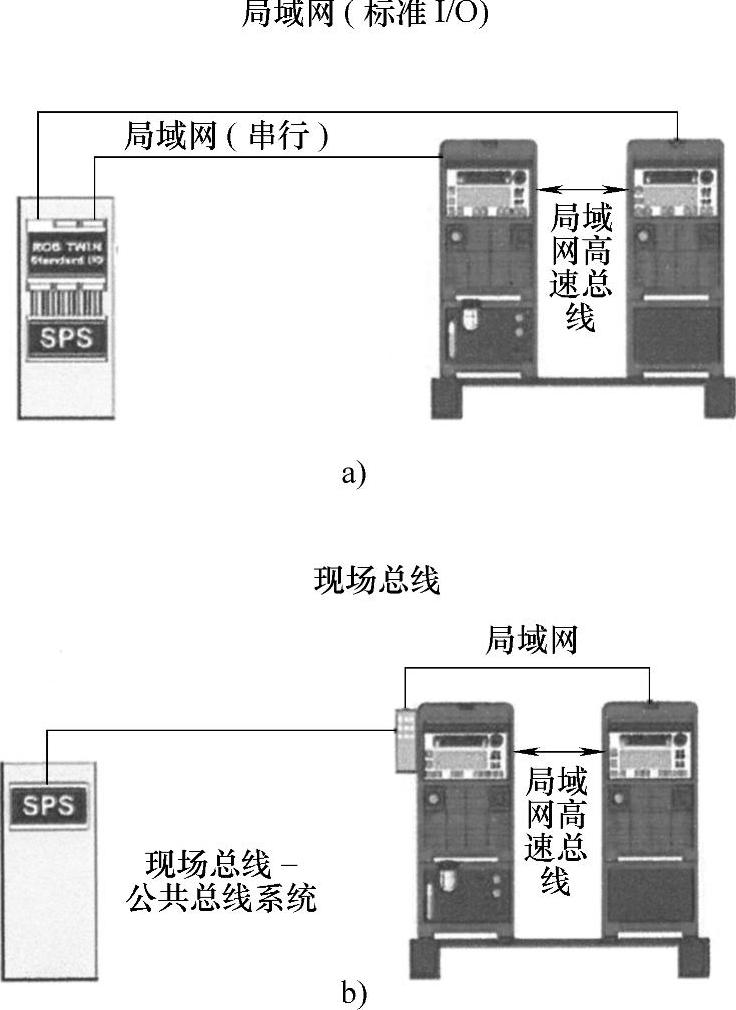
图2-57 Tandem GMAW焊接系统通过局域网或现场总线的连接方法
a)局域网 b)现场总线
(3)操作步骤 Time 5000 Digital焊接电源的操作步骤如下:
1)将主电源开关(G)拨到“I”位置,控制面板上的所有指示灯闪亮。
2)按“焊接方法”按钮4,选择所要求的焊接方法。对于Tandem GMAW应选择优化脉冲GMAW焊接方法。
3)按“填充材料”按钮6,选择待使用的填充金属种类和保护气体。
4)按“焊丝直径”按钮7,选择待使用的焊丝直径。
5)按“操作模式”按钮5,选择所要求的操作模式:分2步、4步、特种4步和点焊;对于铝合金的GMAW焊接法,通常选择特种4步操作模式。
6)按下列参数给定所要求的焊接功率:尺寸“a”角焊缝厚度10、接头板厚11、焊接电流8和送丝速度12。这些参数是相互关联的,只需改变其中一个参数,其余参数随之作相应的调整。在选择尺寸“a”之前,必须先设定焊接速度17。
7)设定气体流量。按“检气”按键22,转动气瓶减压器的调节螺栓直到气体流量计的读数达到所要求的气体流量。
8)按焊枪开关或控制盒上的起动按钮,开始焊接。
为了达到最佳的焊接效果,在某些情况下需修正电弧长度和熔滴脱落力,以及预送气时间、延迟断气时间和软起弧等参数。这些参数只能在1级设置选单中进行设置和修正。
Time 5000 Digital焊接电源具有“引弧暂停”功能,但在出厂设置中未被激活。为激活此功能,可打开第2级“设置选单”。可在5~100mm之间进行设定。“引弧暂停”功能起作用时,如焊丝向前给送的长度达到设置选单上设定的长度之前,焊接电流未开始流动,则电源自动切断。在控制面板上出现服务代码“no/1Gn”。
在Job Master型焊枪上和现场总线模块上显示出“E55”。
此电源也有断弧监视功能。但在出厂设置中,此功能被设置成“关闭”状态。
为激活断弧监视功能,打开第2级“设置选单”,并在0.01~2s之间进行设定。
如出现断弧并在设置选单中规定的时间内电流不再流动,则焊接电源自动切断。在控制面板上出现服务代码“no/Arc”。
当使用ϕ0.8mm、ϕ1.2mm、ϕ1.6mm铝焊丝焊接铝合金时,可以选择无飞溅引弧功能。则要求焊接电源的软件版本为2、60、1,送丝机的软件版本为1、40、15。最好采用推拉式送丝机。
无飞溅引弧功能,可使引弧时实际上不会产生飞溅。焊接开始时,焊丝缓慢向焊件送进,一旦与焊件接触立即停送,接着焊接电流流通,焊丝反抽,当电弧长度达到设定值时,则焊丝以焊接所要求的速度给送。
无飞溅引弧SFi选项,可在设置选单中设定。
铝合金焊接时,为使焊缝具有均整的鱼鳞纹状外形,可以选择同步脉冲功能,并采用特种4步操作模式,如图2-58所示。
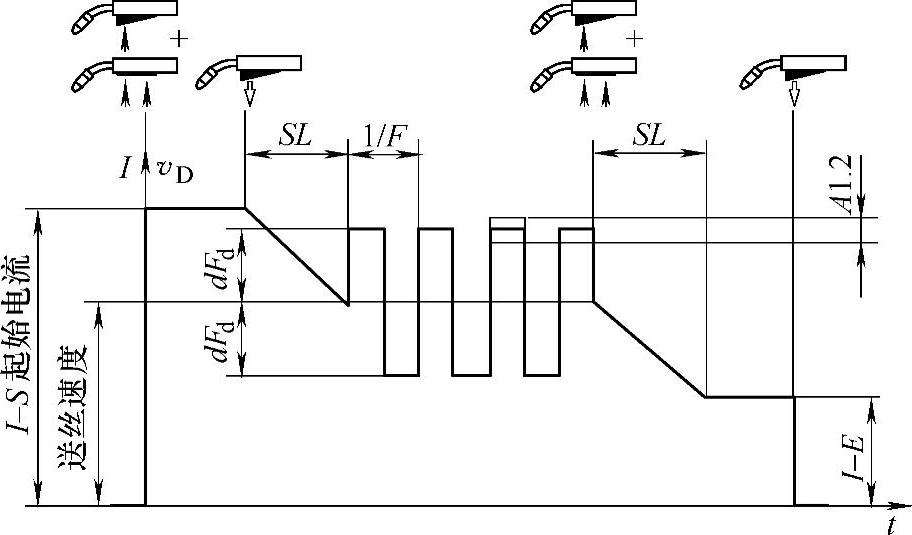
图2-58 同步脉冲图形
SL—电流衰减时间 I-E—填补弧坑时间 F—脉冲电流频率 I—焊接电流 vD—送丝速度 dFd—焊接电流(送丝速度)偏置值 I-S—起始电流
同步脉冲参数,如频率F、焊接电流I/vD(送丝速度)、偏置值dFd和电弧长度修正值A1.2等可在一级设置选单中设定。
当焊接电源与机器人组合成焊接工作站时,且机器人接口或现场总线耦合器连接到局域网,则可选用图2-59所示的特种2步操作模式。
当使用ROB 4000/5000机器人接口或现场总线耦合器接到局域网时,自动选择2步操作模式。如选用ROB 3000机器人接口,则可选择任何一种工作模式,包括2步、4步和特种4步操作模式。
特种2步操作模式的参数只能在1级设置选单中设定。
当机器人接口或现场总线耦合器接到局域网时,也可利用焊丝防粘功能。
标准的出厂设置中,“焊丝粘着检测”功能未被启用。需要时在2级设置选单中激活“焊丝粘着检测”功能。焊接结束后,“焊丝粘着检测”功能立即检测焊丝端在正在凝固的焊接熔池中是否粘着。如焊接结束后在750ms内检测到焊丝端粘着,则立即会出现故障信号“Error54”。当剪断了粘着的焊丝端,则故障信号会消失。
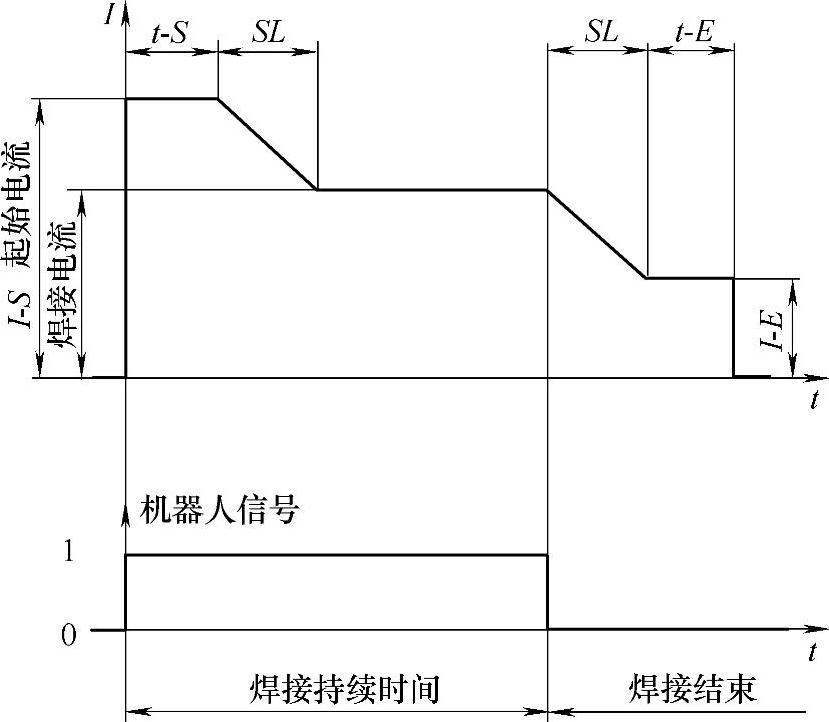
图2-59 特种2步操作模式
t-S—起始电流持续时间 SL—电流衰减时间 t-E—收尾电流持续时间 I-E—填补弧坑时间 I-S—起始电流
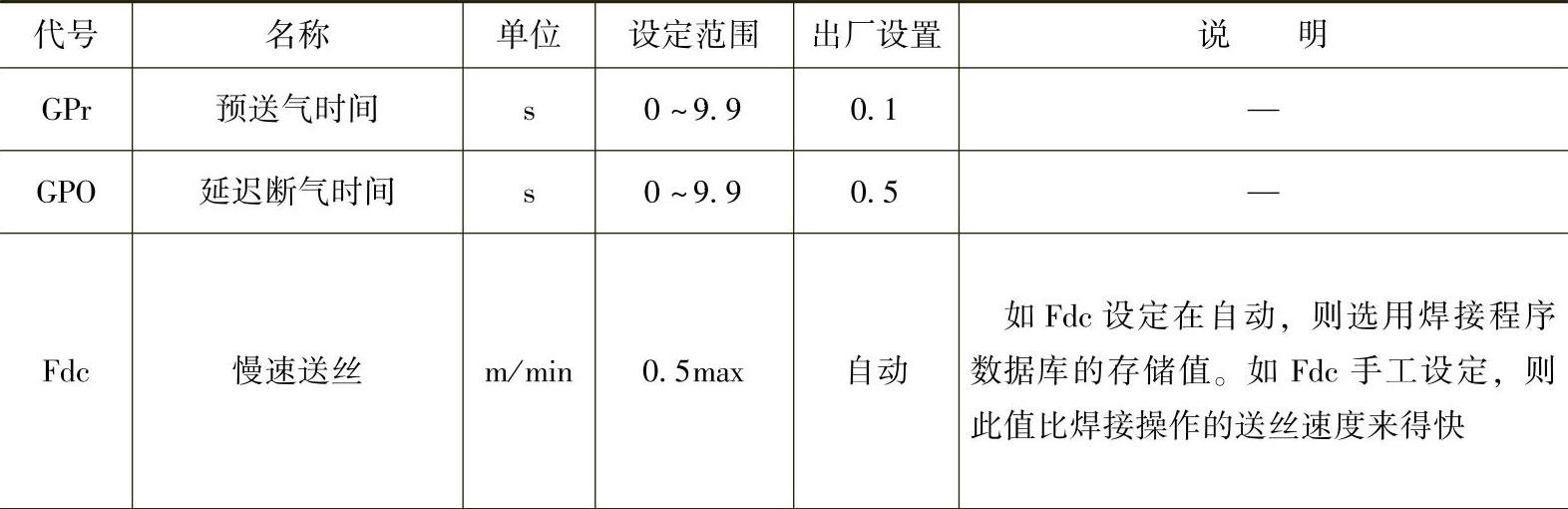
(4)软件控制 由上述可知,Time 5000 Digital焊接电源,也可通过各级选单软件控制焊接参数和焊接程序。在这些选单上可设置和调整的参数有焊接参数、操作模式参数和次级参数。
1)焊接参数。焊接参数主要有预送气时间、延迟断气时间、慢速送丝、点动送丝、返烧时间修正、同步脉冲频率、焊接功率偏置值、电弧长度修正、电弧吹力动态修正、起始电弧长度、电弧长度时间、出厂设置和次级参数。
这些参数的代号、单位,设定范围、出厂设置和说明详见表2-14。按住“点动送丝”(Feeder inching)按钮的时间(s),与送丝速度的关系如图2-60曲线所示。
表2-14 焊接参数代号名称、设定范围、出厂设置和说明
(续)
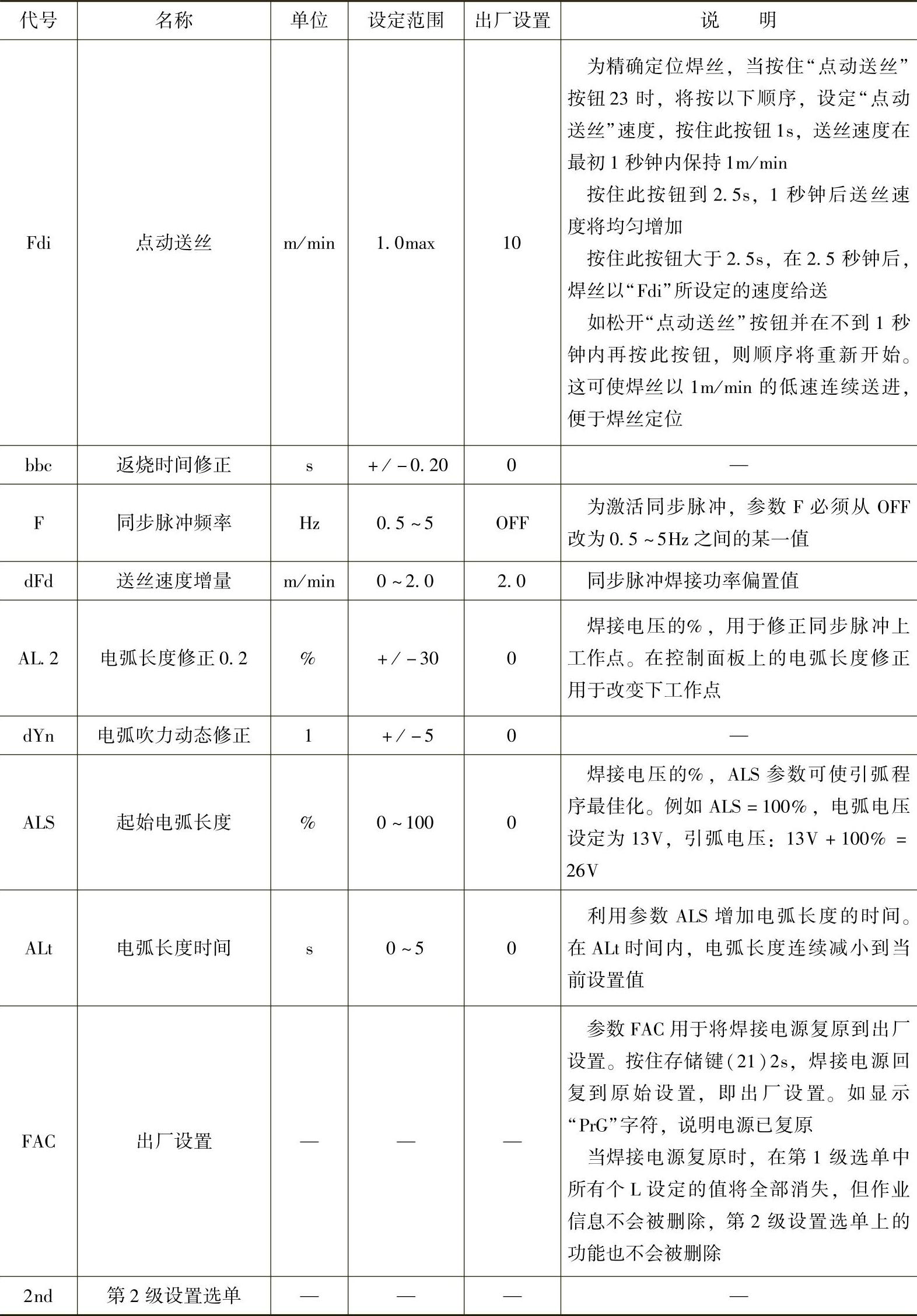
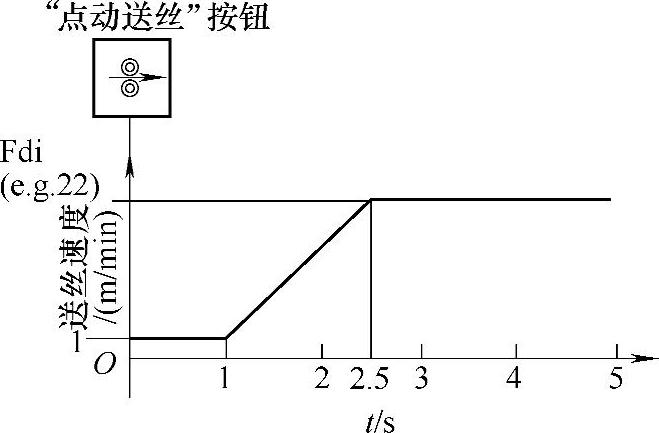
图2-60 按钮时间(s)与送丝速度的关系曲线Fdi—点动送丝
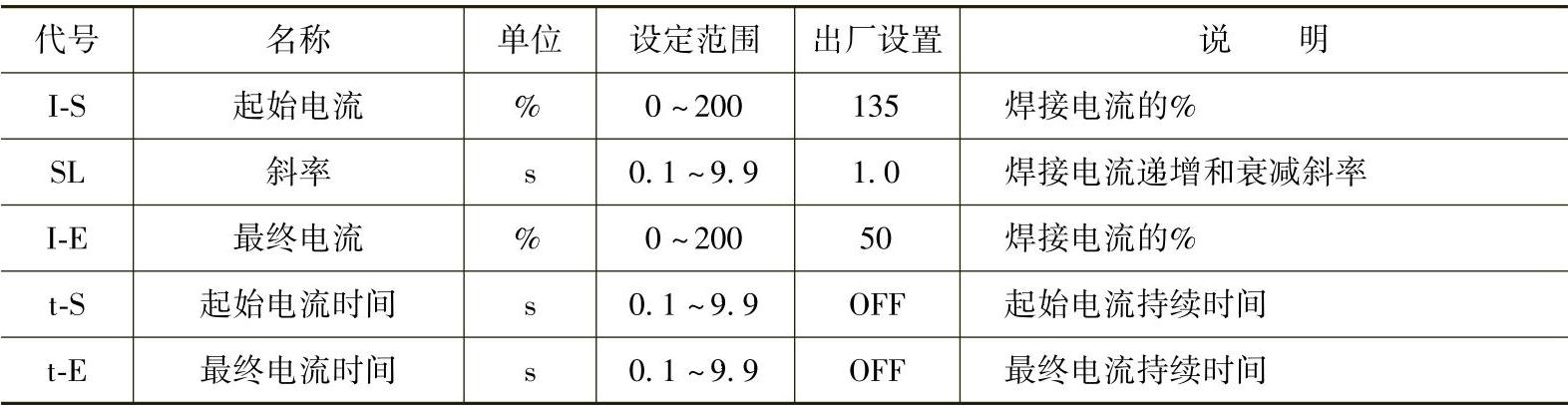
2)操作模式参数。当机器人接口或现场总线耦合器连接到局域网时,可以设定和调整表2-15所列的“特种2步操作模式”参数。
表2-15 特2步操作模式参数代号、名称、设定范围、出厂设置和说明
铝合金GMAW时特种4步操作模式参数,见表2-16。
表2-16 特种4步操作模式参数

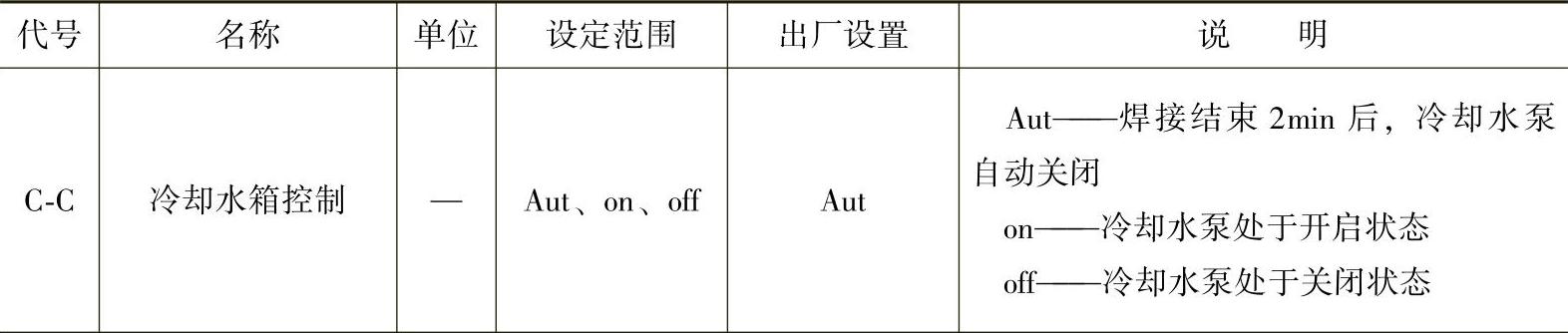
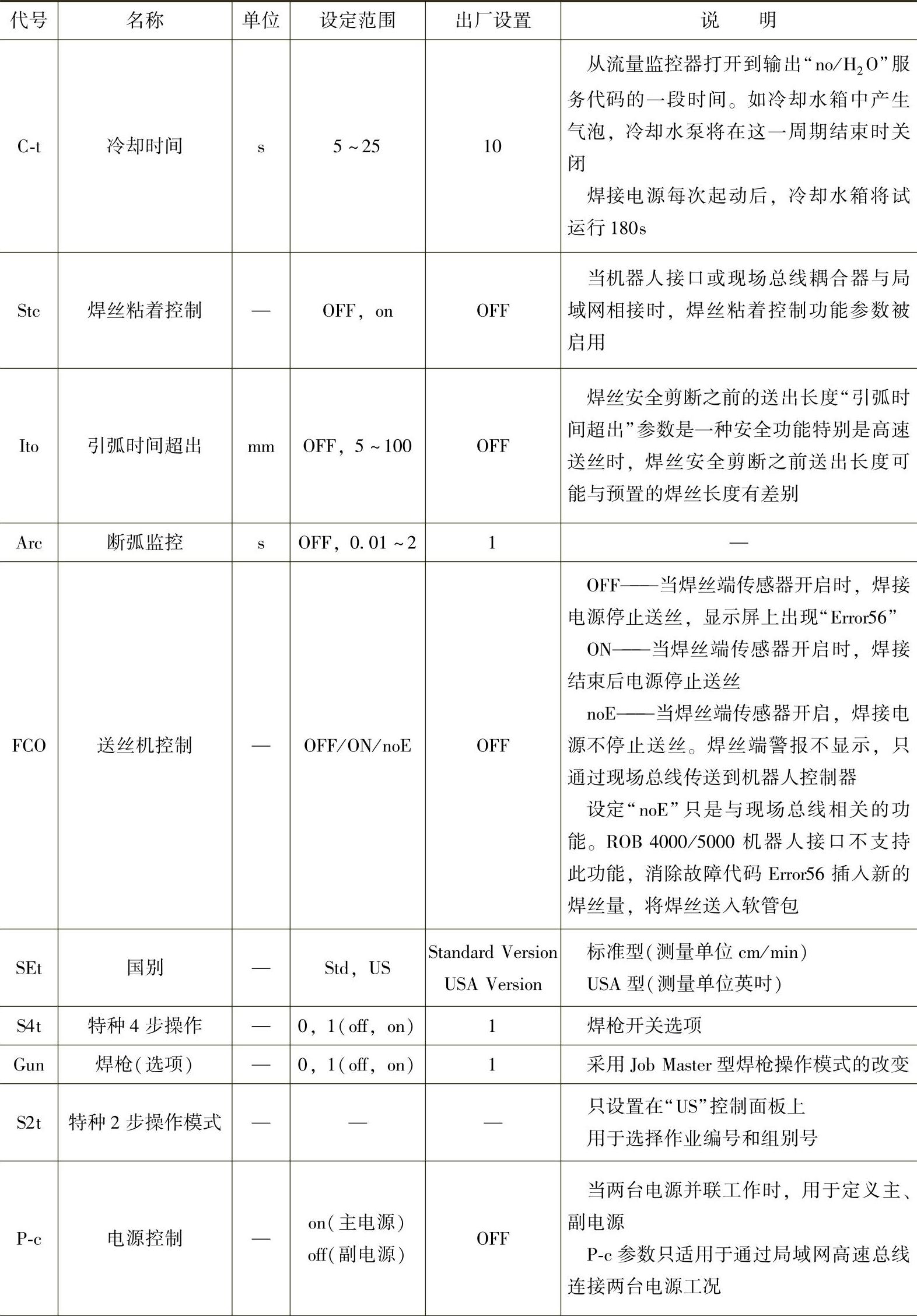
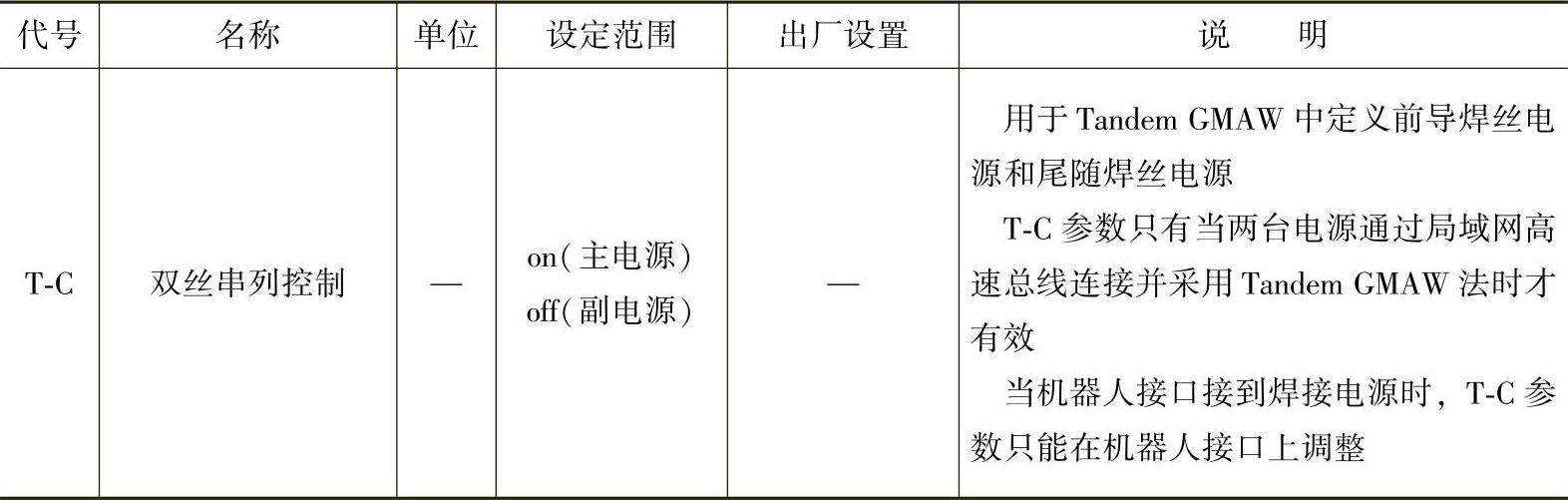
3)次级参数。优化脉冲GMAW的次级参数代号包括C-C、C-t、StC、ItO、ArC、FCO、SEt、S4t、Gun、S2t、r、L、P-C和T-C等,这些参数的代号、名称、单位、设定范围、出厂设置和说明详见表2-17。当使用FAC参数时,下列参数不能恢复到出厂设置:PPU,C-C,StC、ArC,S4t,Gun等。
表2-17 次级参数代号、名称、设定范围、出厂设置和说明
(续)
(续)
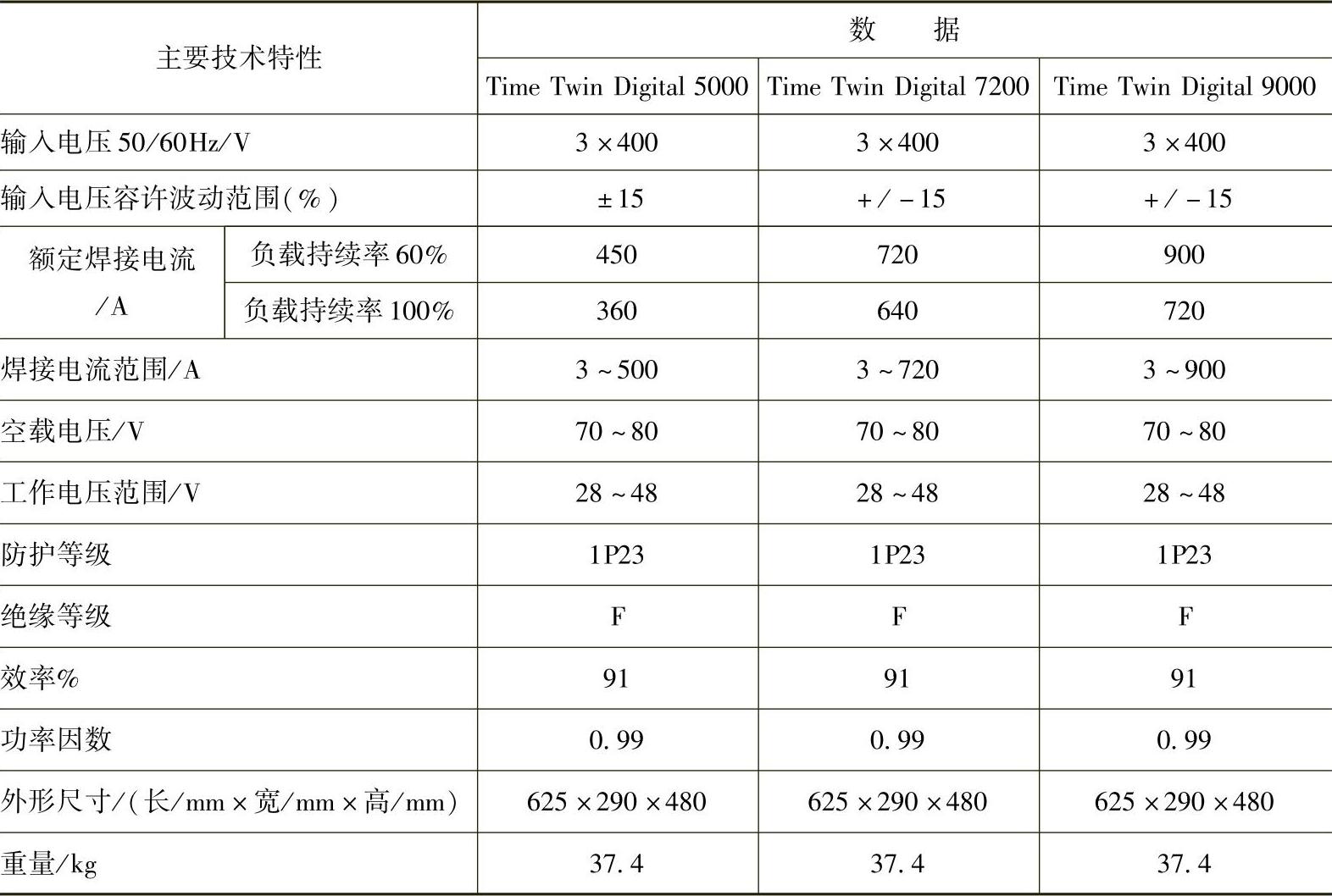
(5)技术特性 Time Twin Digital 5000,7200,9000系列焊接电源的技术特性数据列于表2-18。
表2-18 TimeTwinDigital系列焊接电源技术特性数据
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。